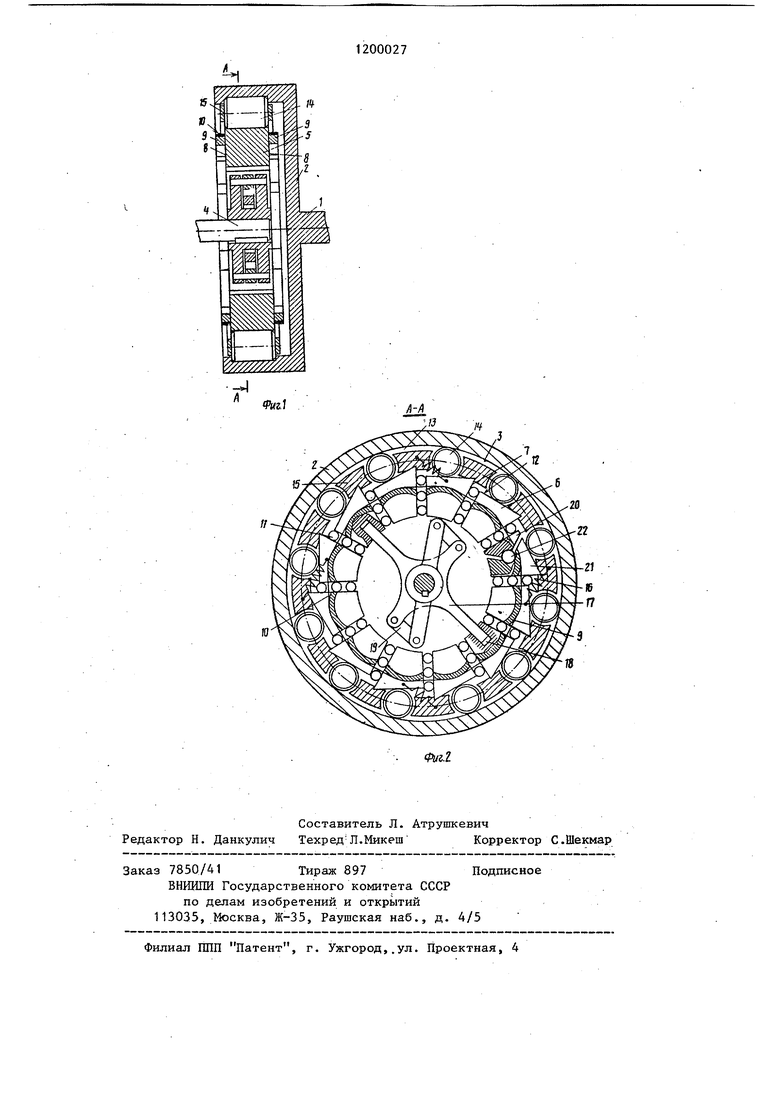
Изобретение отг осится к машиностроению и может быть использовано . в импульсных передачах механизмов и машин. Цель изобретения - снижение уровня контактных напряжений в кинематических парах. На фиг. 1 показан механизм свобод ного хода, разрез; на фиг. 2 - разре А-А на фиг. 1. Механизм свободного хода содержит ведуЕций вал 1, соединенный с наружной обоймой 2, имеющей внутреннюю цилиндринескую поверхность 3, ведомый вал 4, связанный с внутренней ведомой обоймой 5. Последняя выполнена из.усеченных призм 6, прилегаюпщх одна к другой боковьми поверхностями 7 и обращенных между ними ос нованиями к центру механизма. На других боковых поверхностях 8 призм 6 выполнены выступы 9, охваченные .упругими бандажами 10. Между боко выми поверхностями 7 расположены игольчатые подшипники 11. Каждое боль-25
шее основание 12 призмы образует с цилиндрической поверхностью 3 обой мы 2 клиновую полость 13, в кото- . рой расположен ролик 14. Все ролики 14 установлены в сепараторе 15, подпружиненном относительно внуттренней обоймы пружиной 16.
Между внутренней обоймой и ведо-. мым валом 4 расположено устройство для выравнивания давления на роликй.при сцеплении, выполненное в виде самоустанавливающейся поводковой муфты с плавающим водилом17. Концы водила находятся в отверстиях 18 двух диаметрально расположенных призм с радиальными зазорами. Водило 17 шарнирно соединено с двумя поводками 19, расположенными параллельно водилу 17 с обеих сторон и связанными с ведомым валом 4.л
Одна из призм вьшолнена из двух частей 20 и 21, соединенных между собой сферическим шарниром 22.
Механизм свободного хода работает следующим образом.
После момента, соответствующего концу свободного хода, начинается относительное движение наружной обоймы 2, при котором ролики 14 начинают закатываться в клиновую полость 13. Начальные условия заклинивания для каждого ролика различны ввиду неточности изготовления
и наружную обоймы. Передача момента от заклиненной системы призм 6 осуществляется посредством самоустанавливающегося уравнительного
., механизма, компенсирующего несоосность внутренней обоймы из призм 6 с ведомым валом 4, тем самым устраняющего радиальную составляющую реак--ций всех роликов 14 относительно ведомого вала 8.
Благодаря взаимному смещению частей 20 и 21 разрезной призмы 6 относительно сферического шарнира 22 происходит самоустановка призм 6 в радиальной плоскости, благодаря чему обеспечивается компенсация неточности изготовления плоскостей самих призм и уравновешивание осевой составляющей реакций роликов на призмы. Установленные между поверхностями 7 призм игольчатые подшипники 11 позволяют значительно снизить силы трения, возникающие при относительном, смещении призм.
Таким образом, благодаря самоустанавливаемости призм устраняются лишние связи меясду взаимодействующими элементами конструкции, обеспечивается статическая уравновешенность реакций роликов. Это свойство механизма свободного хода
позволяет повысить работоспособность конструкции при повышенных тяговых моментах. 272 взаимодействующих элементов, а также необходимости соблюдения технологических зазоров между роликами 14 и сепаратором .15. Конечныё же условия заклинивания для . всех роликов вьшолняются только при условии статистической уравновешенности всех призм 6. При неуравновешенности любой из призм происходит относительное смещение призмы с одновременным перемещением ролика 14 совместно с сепаратором 15 до того момента, пока реакция прилегаю1цих соседних призм 6 ие урав--новесит реакцию со стороны ролика 14. Так как система призм замкнута, то процесс заклинивания роликов завершается при полной уравновешенности всех призм 6. Таким образом, благодаря самоустанавливаемости призм компенсируется неточность изготовления радиальных размеров и обеспечивается уравновешенность радиальных составляющих реакций всех роликов на внутреннюю
н
и
20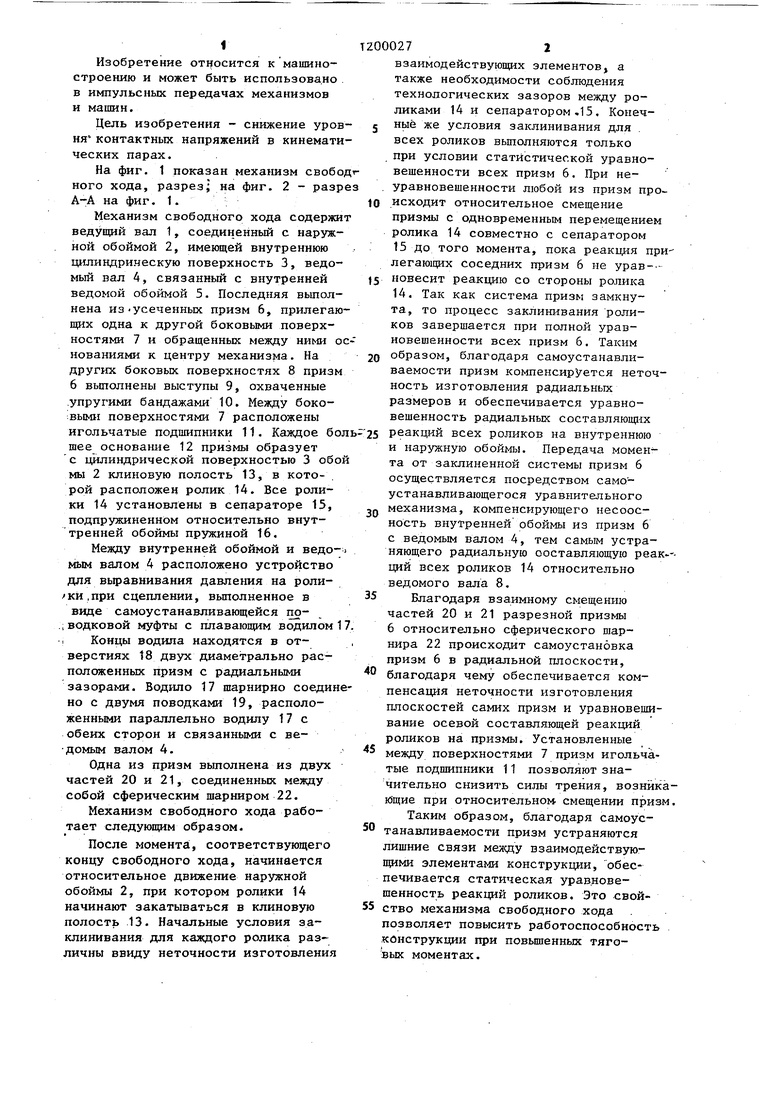
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм свободного хода | 1984 |
|
SU1268843A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 2006 |
|
RU2310108C1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| Механизм свободного хода | 1978 |
|
SU870795A1 |
| АВТОМАТИЧЕСКИЙ ПРИВОД | 1994 |
|
RU2082050C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1999 |
|
RU2156897C1 |
| Муфта необратимого вращения | 1990 |
|
SU1770630A1 |
| РОЛИКОВАЯ ВОЛОКА | 1993 |
|
RU2079386C1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1990 |
|
RU2025624C1 |
1. МЕХАНИЗМ СВОБОДНОГО -ХОДА, /годержапщй концентрично расположенные ведущую обойму и ведомую o6otoiy, связанного с валом, ролики, расположенные между обоймами, и устройство для вьфавнивания давления на- ро лики при сцеплении, отличаю-щ и и с я тем, что, с целью повышения надёжности, ведомая обойма выполнена в виде охваченных упругим бандажом усеченных призм, сопряжен- ных между собой боковыми поверхностями и обращенных меньшим основанием к оси. механизма, в двух диаметрально расположенных призмах выполнены цилиндрические отверстия, устройство для выравнивания давления на ролики при сцеплении выполнено в виде самоустанавливающейся поводковой муфты, водило которой концами установлено в цилиндрических отверстиях обеих призм с радиальным зазором, а ее два поводка расположены параллельно один другому по обе стороны от водила и связаны шарнирно с ним и ведомым валом. 2. Механизм поп. 1, Отли(/) чающийся тем, что одна из призм вьтолнена из двух частей, сое-.диненных между собой шарнирно. g
| МУФТА СВОБОДНОГО ХОДА | 0 |
|
SU274565A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| МУФТА СВОБОДНОГО ХОДА | 1972 |
|
SU419654A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
