Изобретение относится к машиностроению и может быть использовано в импульсных передачах механизмов и машин. Цель изобретения - повышение наг рузочной способности. На чертеже показан механизм свободного хода, разрез. Механизм свободного хода содержит наружную обойму 1, связанную с ведущим валом, условно на чертеже не показанным, имеющую внутреннюю цилиндрическую поверхность, внутреннюю обойму 2 с наружной цилиндрической поверхностью, связанную с ведомым валом, условно на чертеже не показанным, призмы 3, образующие гранями с цилиндрической поверхностью наружной обоймы 1 клиновые полости, ролики 4, размещенные в клиновых полостях, cenap jop 5, удерживающий ролики 4 на равных расстояниях и подпружиненный относительно призм 3 пружинами 6, упругие бандажи 7, охватывающие призмы 3 по выполненньм на их торцовых поверхностя выступам 8, одну разрезную призму, состоящую из двух частей 9 и 10, связанных между собой при помощи сф рического щарнира 11, совмещенньм с выступом 8, вьтолненньм на одной из частей призмы, Между призмами 3 установлены дополнительные клинья 12, контактирую щие с призмами 3 по боковьм плоскос тям 13 и обращенные основания1ьш 14, выполненными в виде цилиндрических поверхностей, к цилиндрической поверхности внутренней обоймы 2, при этом контакт между цилиндрическими поверхностями внутренней и клиньев осуществляется по линии. Для предотвращения заклинивания призм 3 и клиньев 12 между собой уг при их вершинах должен превышать уг трения для применяемых матери.алов в плоскостной кинематической паре смеж ных элементов 3 и 12. Благодаря это силы трения, обусловленные нормальн давлением при взаимодействии смежны элементов, меньше сил, смещающих эт элементы в радиальном направлении, не могут препятствовать их относите льнсжу смещению после снятия нагрузки. Механизм свободного хода работае следующим образом. С момента синхронизации скоросте ведущего и ведомого вала и соответственно обойм 1 и 2 благодаря воздействию пружин 6 сепаратор 5 вводит ролики 4 в клиновую .полость между цилиндрической поверхностью наружной обоймы 1 и основаниями призм 3, При относительном перемещении наружной и внутренней обойм 1 и 2 в направлении, противоположном свободному ходу, происходит заклинивание роликов 4, приводящее к радиальному смещению призм 3 относительно дополнительных клиньев 12 до положения, в котором давление ролика на призму уравновешено суммой сил, возникающих на контактирующшс боковых плоскостях дополнительных клиньев 12, Благодаря замкнутости силового контура и геометрическому подобию призм обеспечивается равномерное распределение нг грузки i на ролики и одновременное их заклинивание при уравновешенности всего силового контура. При этом давление прилегайзщих к клиньям 12 призм 3 создает радиальное усилие, прижимающее клинья 12 к цилиндрической поверхности внутренней обоймы 2, равное радиальному усилию воздействия роликов 4 на наружную обойму 1 и соответствующее значению силы трения, обеспечивающей передачу вращающего момента на ведомую обойму. При-взаимной самоустановке призм 3 и клиньев 12 обеспечивается компенсация несоосности ведущего и ведомого вала и неточность изготовлений цилиндрических поверхностей обойм, а также статическое равновесие всей системы призм 3 и клиньев 12 с роликами 4 и обоймами 1 и 2, Таким образом, благодаря установке между призмами дополнительных клиньев, взаимодействующих с ве домой обоймой, обеспечивается равномерное распределение вращающего момента и его передача на ведомую обойму при обеспечении статической уравновешенности механизма. Кроме того, снимаются ограничения на максимально допустимое количество призматических элементов. Это свойство механизма позволит повысить величину передаваемых вращающих моментов и увеличит работоспособность конструкции при повьшенных значениях тяговых моментов. Формула изобретения Механизм свободного хода, содержащий ведущую обойму, расположенную
3 1268843.
внутри нее звездочку в виде охвачен-повьшения нагрузочной способности, он
ных упругим бандажом призм, на плос-снабжен клиньями с цилиндрическими
ких гранях которых расположены роликиоснованиями,, размещенными между приз-
в сепараторе, подпружиненном относи-мами и контактирующими основаниями
тельно призм, и ведомую обойму, уста-5 с ведомой обоймой, а боковыми поверхновленную Ьнутри звездочки, о т л и-ностями - с гранями двух смежных
чающийся тем, что, с цельюпризм.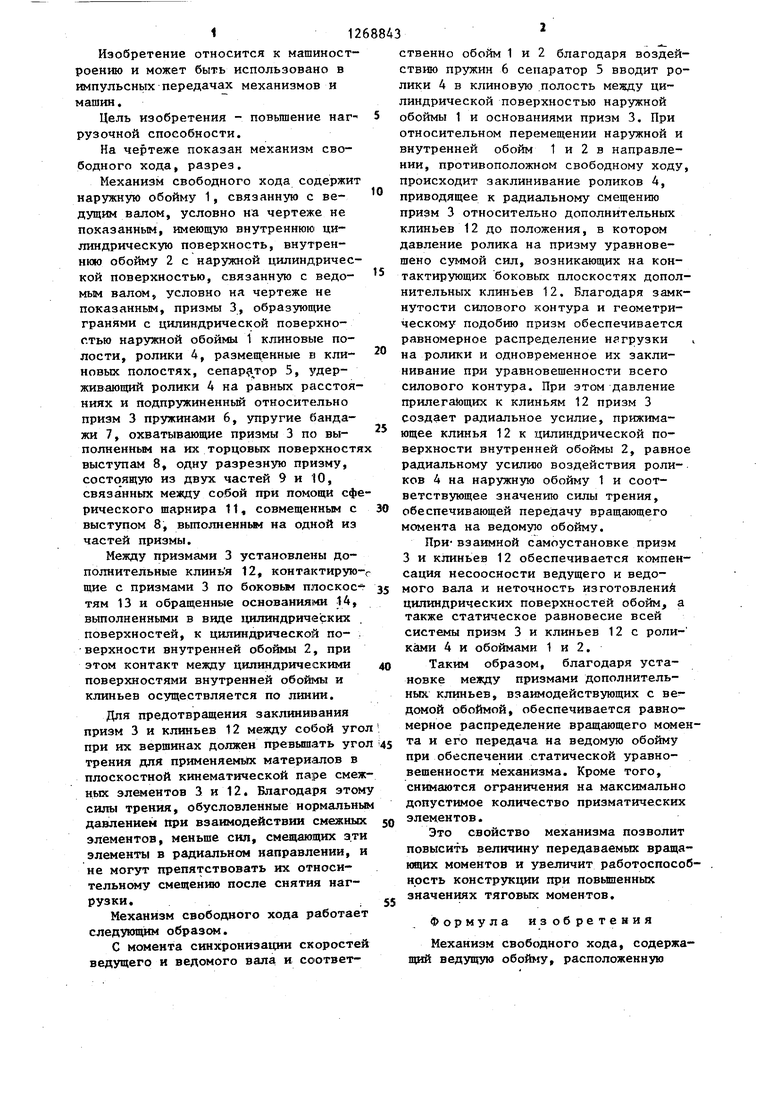
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм свободного хода | 1984 |
|
SU1200027A1 |
| СТАН ДЛЯ ПОПЕРЕЧНО-КЛИНОВОЙ ПРОКАТКИ | 1996 |
|
RU2124958C1 |
| Клиновый механизм свободного хода | 1986 |
|
SU1434179A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| МУФТА СВОБОДНОГО ХОДА | 1990 |
|
RU2011053C1 |
| МУФТА СВОБОДНОГО ХОДА | 2005 |
|
RU2304731C2 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1998 |
|
RU2146342C1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 2006 |
|
RU2310108C1 |
| ВАРИАТОР | 1997 |
|
RU2151934C1 |
Изобретение относится к машиностроению и может быть использовано в импульсных передачах. Целью изобретения является повьпиение нагрузочной cnoco6HocTHi Механизм свободного хода врдержит ведущую, обойму 1 и ведомую обойму 2. Между обоймами размещена звездочка в виде набора призм 3 и клиньев 12. Упругий бандаж 7 охватывает элементы звездочки. Ролики 4 расположены на гранях призм и.размещены в сеператоре 5, подпружиненном относительно призм. Основания клиньев 12 имеют цилиндрические поверхности 14, контактирующие с обоймой 2. При заклинивании роликов 4 неравномерность давления роликов на призмы 3 компенсируется перемещением призм по боковым плоскостям клина 12 до выравнивания давления. Это давление прижимает клинья 12 к цилиндрической поверхности обоймы 2 и обеспечивает (Л передачу вращения. 1 Ш1 //
| МУФТА СВОБОДНОГО ХОДА | 1972 |
|
SU419654A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Механизм свободного хода | 1984 |
|
SU1200027A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
