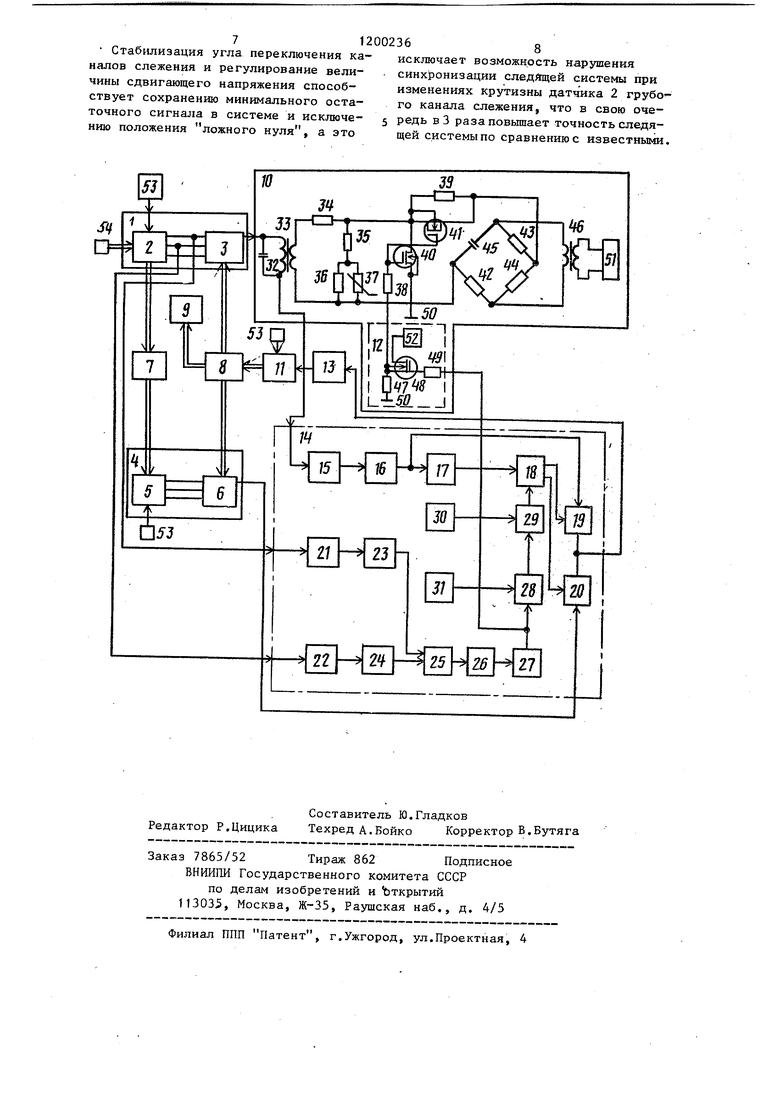
Изобретение относится к приборостроению и может быть использовано, например, в двухотсчетных высокоточ ных измерителях углов с дистанционным управлением. Цель изобретения - повышение точности системы путем автоматического регулирования величины сдвигающего напряжения в зависимости от крутизны характеристики датчик - приемник грубого канала слежения. На чертеже показана функциональная схема системы. Система содержит грубый канал 1 слежения, первый датчик 2, первый приемник 3, точный канал 4 слежения, второй датчик 5, второй приемник 6, первый 7 и второй 8 редукторы, отсче ное устройство 9, преобразователь 10 напряжения, электродвигатель 11, третий повторитель 12, усилитель 13 мощности, синхронизирующее устройство 14, ограничитель 15 сверху, усилитель 16-, первьй выпрямитель 17 преобразователь .18, первый 19 и второй 20 ключи, первый 21/и второй 22 повторители, первый 23 и второй 24 детекторы, первый сумматор 25, блок 26 извлечения квадратного корня, второй выпрямитель 27, блок 28 сравнения, второй сумматор 29, источ ник 30 эталонного напряжения, источник 31 опорного напряжения, конденсатор 32, выходной повышающий трансформатор 33; резистор 34 - 36, термо резистор 37, резисторы 38 и 39, тран зисторы 40 и 41, резисторы 42 - 44, конденсатор 45, входной понижающий трансформатор 46, резистор 47, транзистор 48, резистор 49, общую шину 50, источник 51 переменного напряжения , источник 52 постоянного напряжения, источник 53 переменного нап ряжения, задатчик 54. Грубый канал 1 слежения состоит из первого датчика 2 и первого прием ника 3, Точный канал 4 слежения состоит из второго датчика 5 и второго приемника 6. Первый 2 и второй 5 датчики и первый 3 и второй 6 приемники могут быть реализованы на базе синусо-косинуснык вращающихся трансформаторов. Синхронизирующее устройство 14 функционально состоит из блока управления работой каналов слежения и блока выработки напряжения, пропор ционального крутизне характеристики датчик 2 приемник 3 грубого канала 1 слежения. Эти блоки синхронизирующего устройства 14 на чертеже структурно невыделены, но их можно легко различить по их внутреннему составу Блок управления работой каналов состоит из ограничителя 15 сверху, вход которого является вторым входом синхронизирующего устройства 14, усилителя 16, выпрямителя 17, преобразователя 18 и выходных ключей 19 (грубьй канал) и 20 (точньй канал). Вход ключа 20 является первым входом синхронизирующего устройства 14. Выходы ключей 19 и 20 являются первым выходом синхронизирующего устройства 14. Б зависимости от величины выходного напряжения первого приемника 3, поступающего на вход ограничителя 15 сверху и проходящего через усилитель 16, выпрямитель .17 и преобразователь 18 на управляющие входы первого 19 и второго 20 ключей, открывается один из них, например ключ 19 (20), и на первьй вькод синхронизирующего устройства 14 поступает выходное напряжение грубого канала 1 слежения (точного канала 4 слежения). Блок выработки напряжения, пропорционального крутизне характеристики датчик 2 - приемник 3 грубого канала слежения состоит из повторителей 21 и 22, детекторов 23 и 24, сумматора 25, блока 26 извлечения квадратного корня, выпрямителя 27, блока 28 сравнения, сумматора 29, источника 30 эталонного напряжения и источника 31 опорного напряжения. В качестве детекторов 23 и 24 применяются квадратичные детекторы. На вход повторителя 21, являющегося третьим Входом синхронизирующего устройства 14, поступает напряжение с косинусной обмотки первого датчика 2, т.е. напряжение, пропорциональное косинусу угла поворота вала датчика 2, на вход повторителя 22, являющегося четвертьш входом синхронизирующего устройства 14, - напряжение с синусной обмотки первого датчика 2, т.е. напряжение, пропорциональное синусу угла поворота вала датчика 2. В результате на выходе выпрямителя 27 устанавливается напряжение постоянного тока, пропорциональное крутизне характеристики датчик 2 - приемник 3 грубого канала 1 слежения. Повторители 21 и 22 служат исключительно для согласования выходов первого датчика 2 и входов детекторов 23 и 24 по сопротивлению и мощности и не несут в предлагаемом техническом решении никаких функциональных нагрузок. В качестве источников питания пер вого 2 и второго 5 датчиков и электродвигателя 11 применяется один и тот же источник 53 переменного напря жения . Преобразователь 10 напряжения содержит входной понижающий трансформа тор 46, источник 51 переменного напряжения, выходной каскад, включающий в себя конденсатор 32j выходной повы шающий трансформатор 33 и резистор 34, термоцепочку, составленную из резисторов 35 и 36 и терморезистора 37, управляемый аттенюатор, состоящий из резисторов 38 и 39 и транзисторов 40 и 41, мостовую фазосдвигающую цепь, выполненную на резисторах 42-44 и конденсаторе 45, повторитель 12, содержащий резисторы 47 и. 49, транзистор 48, являющийся основным Элементом повторителя 12, и источник 52 постоянного напряжения. Повторитель 12 аналогичен по своему назначению повторителям 21 и 22 и служит для согласования второго выхода синхронизирующего устройства 14 и входа аттенюатора, преобразователя 10 напряжения, состоящего из резисторов 38 и 39 и транзисторов 40 и 41. При подаче напряжения с выхода источника 51 переменного напряжения на входной трансформатор 46 на его выходной обмотке устанавливается требуемая величина напряжения. Мостовая фазосдвигающая цепь, состоящая из резисторов 42-44 и конденсатора 45, позволяет получить на ее выходе напряжение, фаза которого совпадает с фазой выходного напряжения первого приемника 3. Управляемый аттенюатор, состоящий из резисторов 38 и 39 и транзисторов 40 и 41 позволяет регулировать величину сдвигающего напряжения в зависимости от изменения кру тизны К характеристики датчик 2 приемник 3. С увеличением крутизны К выходное напряжение аттенюатора возрастает и, наоборот, с уменьшением крутизны - падает. Подбором величин сопротивления резистора 39 и коэффициента усиления транзистора 41 устанавливается примерно пропорциональная зависимость величины сдвигающего напряжения на выходе преобразователя 10 напряжения от крутизны характеристики датчик 2 - приемник 3. Термоцепочка, состоящая из резисторов 35 и 36 и терморезистора 37, позволяет стабилизировать величину сдвигающего напряжения на выходе преобразователя 10 напряжения при изменении температуры окружающей среды. Трансформатор 33 служит для согласования выхода приемника 3 с входом преобразователя 10 напряжения. Конденсатор 32 служит для настройки преобразователя 10 напряжения на частоту полезного сигнала, а резистор 34 - для уменьшения влияния выходного напряжения приемника 3 на характеристики преобразователя 10 напряжения. Напряжение с выхода выпрямителя 27, являющегося вторым выходом синхронизирующего устройства 14 через повторитель 12 поступает на затворы транзисторов 40 и 41, управляет коэффициентом передачи аттенюатора, состоящего из транзисторов 40 и 41 и резисторов 38 и 39, и изменяет величину напряжения на выходе преобразователя 10 напряжения в зависимости от крутизны характеристики датчик 2 - приемник 3 таким образом, чтобы фазовые сдвиги напряжений на выходах приемника 3 и преобразователя 10 напряжения были равны, а их алгебраическая сумма равнялась нулю. Благодпря этому на входе ограничителя 15 сверху достигается минимальная величина напряжения и тем. самым исключается нарушение синхронизации переклаочения каналов 1 и 4 слежения. Кроме того, измерение крутизны характеристики датчик 2 - приемник 3 синхронизирующим устройством 14 позволяет стабилизировать угол (точнее зону углов), при котором осуществляется переключение каналов 1 и 4 слежения и который задается величиной напряжения на выходе источника 30 эталонного напряжения . Указанную функцию стабилизации угла выполняет совокупность блоков, состоящая из блока 28 сравнения, суматора 29, источника 30 эталонного напряжения и источника 31 опорного напряжения. В блоке 28 сравнения сравниваются напряжения, поступающие с выходов источника 31 опорного напряжения и выпрямителя 27. При оптимальной крутизне характеристики датчик 2 - приемник 3 напряжение на выходе источника опорного напряжения 31 выбирается равньш напряжений на выходе выпрямителя 27, В этом случае напряжение на выходе блока 28 сравнения равно нулю и оно не влияет на выходное напряжение сумматора 29. При изменении (увеличении или уменьшении) крутизны характеристики датчик 2 - приемник 3 изменяется величина напряжения на входе ограничителя 15 сверху и, следовательно, на выходе выпрямителя 17. Однако, изменение угла (т.е зоны углов) переключения каналов 1 и 4 слежения под действием выходных напряжений преобразователя 18 не про изойдет по следующим причинам. При измене;|1ии (увеличении или уменьшении) крутизны характеристики датчик 2 - приемник 3 изменяется (уве личивается или уменьшается) напряжение на выходе выпрямителя 27, и на выходе блока 28 сравнения появляется напряжение положительной (при увеличении крутизны) или отрицательной (при уменьшении ее) полярности. Это напряжение склар лвается в сумматоре 29 с выходным напряжением источника 30 эталонного напряж&ккя и изменяет величину выходного напряжения сумматора 29. При увеличении крутизны напряжение на.выходе сумматора 29 увеличивается и, наоборот, при уменьшении крутизны уменьшается так, что появление напряжения на выходе преобразователя 18, управляющее рабо той ключей 19 или 20 происходит независимо от изменения крутизны харктеристики датчик 2 - приёмник 3. Следящая система работает следующим образом. При изменении углового положения датчика 2 грубого канала 1 слежения через первьй редуктор 7 изменяется угловое положение датчика 5 точного канала 4 слежения, причем угловые положения да:тчиков 2 и 5 каналов 1 и 4 слежения отличаются в число раз, соответствующее передаточному отношению первого редуктора 7. , На выходах приемника 3 грубого ка нала 1 слежения и приемника 6 точного канала 4 слежения образуются напряжения, пропорциональные углам рассогласования в положениях датчика и приемника соответствующего канала слежения. Напряжение с приемника 3 грубого канала 1 слежения складьгаается с выходным напряжением преобразователя 10 напряжения для 1 366 исключения ложного нуля, характерного для двухканальной следящей системы с четным передаточным отношением редукторов. Это суммарное напряжение и выходное напряжение приемника 6 точного канала 4 слежения поступают на входы синхронизирующего устройства 14, которое в зависимости от уровня выходного напряжения грубого канала 1 слежения (от угла рассогласования в грубом канале слежения) подключает к входу усилителя 13 мощности суммарное напряжение грубого канала 1 слежения для напряжения точного канала 4 слежения. Усилитель 13 мощности усиливает поступившее напряжение и подает его на электродвигатель 11, которьш через второй редуктор 8 изменяет угловое положение валов приемников 3 и 6 грубого и точного каналов 1 .и 4 слежения до нулевого рассогласования их с положениями валов датчиков 2 и 5-. Одновременмо устанавливается в определенное положение вала отсчетное устройство 9. При малом угле рассогласования, не превьшающем определенный угол, работа электродвигателя 11 осуществляется по сигналу точного канала 4 слежения, в другом случае - по сигналу суммарного выходного напряжения грубого канала 1 слежения. Угол переключения саналов слежения выбирается в зависимости от параметров следящей системы. Синхронизирующее устройство 14 через повторитель 12, служащий для согласования электрических-характеристик преобразователя 10 напряжения и синхронизирующего устройства 14, подает на второй вход преобразователя 10 напряжения управляющее напряжение, величина которого измеряется пропорционально срутизне характеристики датчик 2 - приемник 3. С увеличением (уменьшением) крутизны характеристики датчик 2 - приемник 3 увеличивается (уменьшается) величина напряжения управляющего и соответственно увеличивается (уменьшается) величина сдвигающего напряжения. Одновременно, с изменением крутизны характеристики датчик 2 приемник 3 грубого канала слежения синхронизирующее устройство 14 еше и стабилизирует величину угла (т.е.зоны углов) переключения грубого и точного каналов 1 и 4 слежения по указанному алгоритму.
7 12002368
Стабилизация угла переключения ка-исключает возможность нарушения
налов слежения и регулирование вели-. синхронизации следящей системы при
чины сдвигающего напряжения способ-изменениях крутизны датчика 2 грубоствует сохранению минимального оста-го канала слежения, что в свою очеточного сигнала в системе и исключе-5 редь в 3 раза повышает точность следянию положения ложного нуля, а этощей системы по сравнению с известными.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактное переключающее устройство каналов для двухканальной системы | 1984 |
|
SU1246048A1 |
| Бесконтактное переключающее устройство каналов для двухканальной системы | 1981 |
|
SU1019394A1 |
| ИМИТАТОР ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 1994 |
|
RU2077705C1 |
| Устройство для управления выпрямителем | 1988 |
|
SU1644317A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| УСТРОЙСТВО ТЕПЛОВОЙ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2498472C1 |
| Устройство для управления тиристорами трехфазного мостового выпрямителя | 2020 |
|
RU2732737C1 |
| Блок логических схем устройства для импульсного управления высоковольными вентилями -фазного каскадно-мостового преобразователя | 1973 |
|
SU599713A1 |
| СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2560204C2 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
ДВУХКАНАЛЬНАЯ СЛЕДЯЩАЯ СИСТЕМА, содержащая задатчик, выходной вал которого кинематически соедине.н с входным валом первого датчика, вход которого подключен к выходу источника переменного напряжения, выходы - к соответствующим входам -первого приемника, а выходной вал через первый редуктор подключен к входному валу датчика, соединенного входом с выходом источника переменного напряжения, а выходами - с соответствующими входами второго приемника, подключенного выходом к первому входу синхронизирующего устройства, соединенного первык выходом через усилитель мощности с первым входом электродвигателя, подключенного вторым входом к вьпсоду источника переменного напряжения, а валом, кинематически, через второй редуктор - к валам первого и второго приемников и отсчетного устройства, отличающаяся тем, что, с целью повышения точности системы, в нее введен i преобразователь напряжения, соединенньШ первьм входом с выходом первого (Л С приемника, вторым входом - с вторым выходом синхронизирующего устройства,, а выходом - с вторым входом синхронизирующего устройства, подключенного третьим и четвертым входами к первому и второму выходам первого датчика.
| Следящая система | 1973 |
|
SU452804A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Ахметжанов А.А | |||
| Высокоточные системы передачи угла автоматических устройств | |||
| М.: Энергия, 1975, с.190198, рис.9-6. | |||
