Изобретение относится к управлению электрическими машинами и может быть использовано для построения систем управления длинноходовыми электромагнитными двигателями и устройствами с поочередно включаемьми обмотками.
Цель изобретения - повьшение КПД и надежности двигателя.
На фиг. 1 изображено устройство для управления электромагнитным двигателем, реализующее предлагаемый способi на фиг. 2 - временные диагрмы работы отдельных узлов устрой- ства управления электромагнитным двигателем; на фиг. 3 - схема амплитудного детектора.
Устройство управления электромагнитным двигателем содержит выходной усилитель 1 мощности, подключенный к обмоткам 2 и 3 электромагнитного двигателя, шунтированным обрат1Л1ми диодами 4 и 5, и включающий в себя ключевые элементы 6 и 7, и датчики 8 и 9 тока, а также амплитудные детекторы 10 и 11, компараторы 12 и 13, элемент ИЛИ 14, распределитель 15 импульсов, формирователи 16 и 17 импульсов запуска. Вход 18 распределителя 15 импульсов является входом начальной установки последнего в исходное состояние.
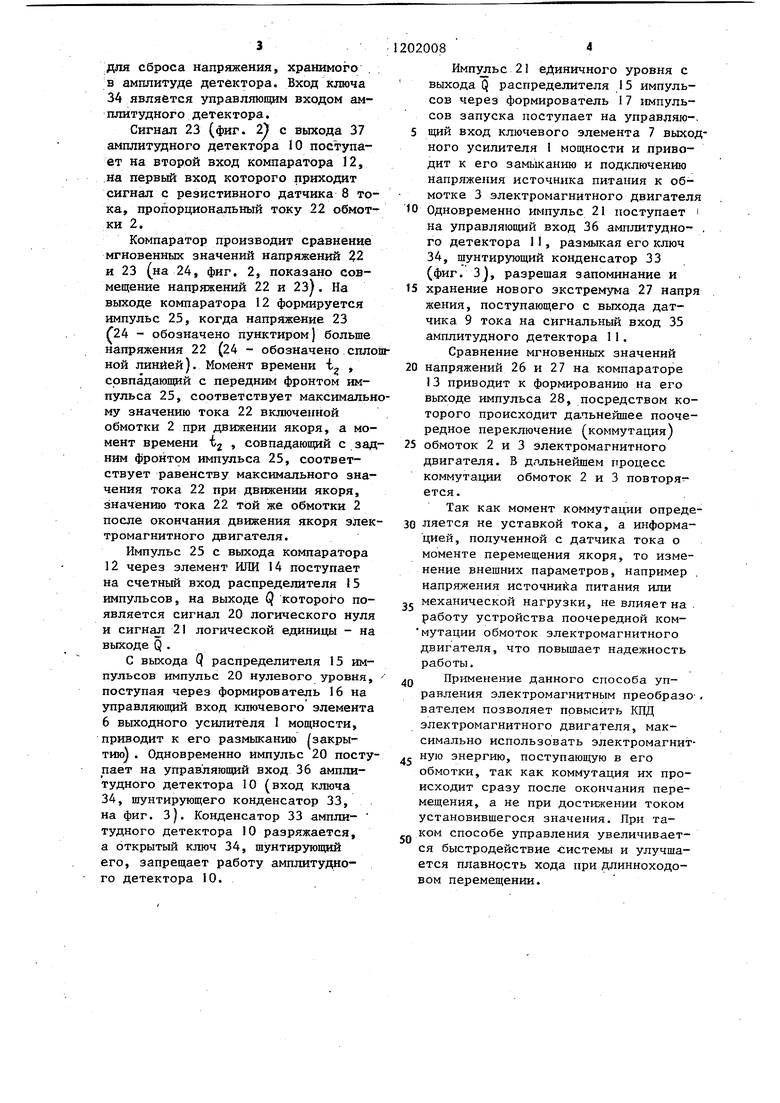
Временные диаграммы сигналов 19-28 на элементах устройства приведены на фиг. 2.
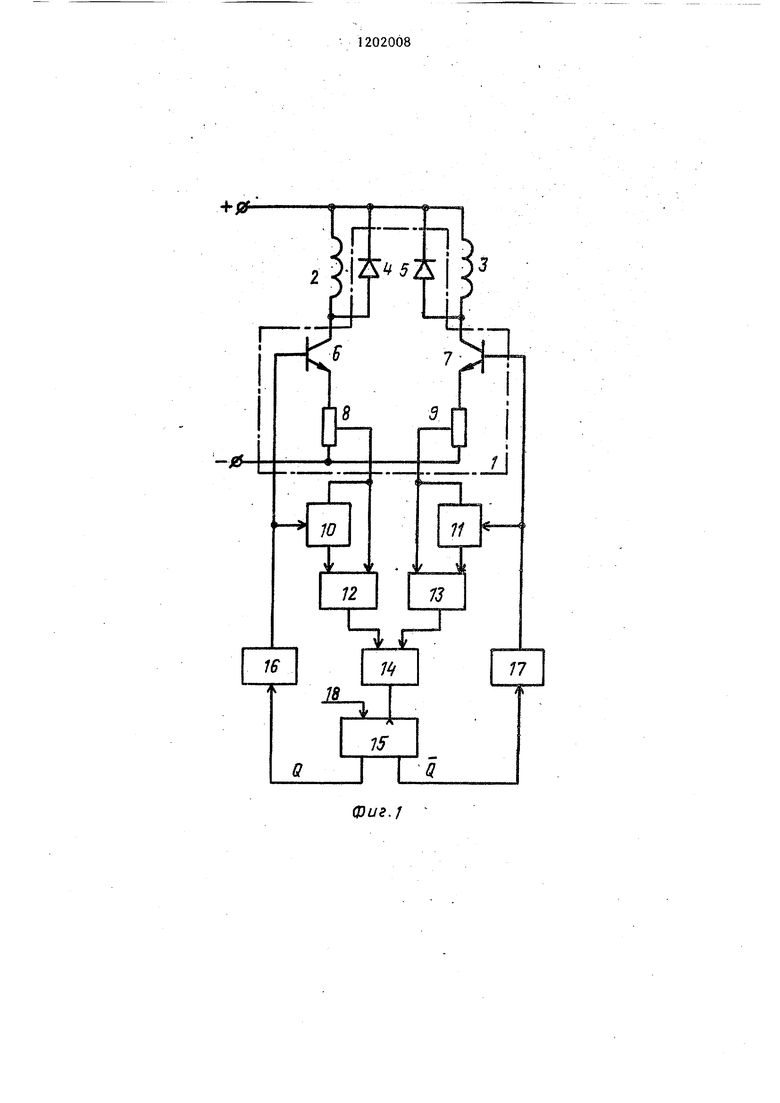
Одна из возможных схем амплитудного детектора (фиг. З) состоит из операционных усилителей 29 и 30, резистора 31 обратной связи диода 32, конденсатора 33, зашунтированного ключом 34. Вход 35 является сигнальным входом амплитудного детектора (фиг. 3, вход 36 - управляющим входом, а выход 37 - выходом амплитудного детектора.
В качестве распределителя 15 импульсов в устройстве для коммутации обмотки двухфазного электромагнитного преобразователя (фиг. l) , например двухтактного электромагнитного вибратора, можно использовать 1К-триггер с установочными входами RS, на один из которых поступает сигнал начальной установки.
При подаче питания на устройство (фиг. 1/ поочередной коммутации обмотки электромагнигного двигателя на вход 18 ряспрелр.пителя 15 импульсов поступает импульс 19 устано;зки в начальное состояние (узел формирования не показан).
На первом выходе (Q) распределителя 15 импульсов появляется единичный импульс 20 и нулевой импульс 21 на его втором инверсном выходе (Q).
Работа устройства по предлагаемому способу происходит следующим образом.
Единичный импульс 20 с выхода распределителя 15 импульсов через формирователь 16 импульсов запуска поступает на управляющий вход ключевого элемента 6, например транзистора, выходного усилителя 1 мощности, включая его. Напряжение источника питания прикладьшается к обмотке 2 электромагнитного двигателя и в ней начинает протекать ток 22. Одновременно единичный импульс 20 с выхода формирователя 16 импульсов поступает на управляющий вход 36 амплитудного детектора 10, размыкая ключ 34 (фиг. З), и тем самым подготавливает амплитудный детектор 10 к работе, а нулевой импульс 21 с выхода формирователя 17 поступает на управляющий вход 36 амплитудного детектора 11, замыкая ключ 34 (фиг. 3), который шунтирует конденсатор 35 и запрещает работу амплитудного детектора 11.
Ток обмотки2, протекая через
5. датчик 8 тока, вызывает на нем падение напряжения, пропорциональное току 22 обмотки 2, которое поступает на сигнальный вход 35 амплитудного детектора 10. .,
О Амплитудный детектор 10 (и 11)
служит для запоминания значения экст ремума (i, на фиг. 2) входного напряжения, пропорционального току 22 обмотки 2, и его хранения на
5 конденсаторе 33 (фиг. З). Экстре мум функции входного напряжения соответствует максимуму тока 22 включенной обмотки 2 при движении якоря электромагнитного двигателя.
0 в цепь обратной связи амплитудного детектора 10 (фиг. З включен повторитель на операционном усилителе 30, уменьшающий погрешность детектирования, обусловленную напряжением смещения нуля, входными токами и конечньш усилением операционного усилителя 29, ключ 34, шунтирующий конденсатор 33, предназначен для сброса напряжения, хранимого . в амплитуде детектора. Вход ключа 34 является управляющим входом амплитудного детектора. Сигнал 23 (фиг. 2) с выхода 37 амплитудного детектора 10 поступает на второй вход компаратора 12, на первый вход которого приходит сигнал с резкстивного датчика 8 То ка, пропорциональный току 22 обмот ки 2. Компаратор производит сравнение мгновенных значений напряжений 22 и 23 (на 24, фиг. 2, показано совмещение напряжений 22 и 23). На выходе компаратора 12 формируется импульс 25, когда напряжение 23 f24 - обозначено пунктиром J больше напряжения 22 (24 - обозначено спл ной линией). Момент времени t , срвпадаюпрсй с передним фронтом импульса 25, соответствует максималь му значению тока 22 включенной обмотки 2 при движении якоря, а мо мент времени ij совпадающий с.за ним фронтом импульса 25, соответствует равенству максимального зна чения тока 22 при движении якоря, значению тока 22 той же обмотки 2 после окончания движения якоря эле тромагнитного двигателя. Импульс 25 с выхода компаратора 12 через элемент ИЛИ I4 поступает на счетный вход распределителя 15 импульсов, на выходе Q которого по является сигнал 20 логического нул и сигнал 21 логической единицы - н выходе Q. С выхода Q распределителя 15 им пульсов импульс 20 нулевого уровня поступая через формирователь 16 на зшравляющий вход ключевого элемент 6 выходного усилителя 1 мощности, приводит к его размыканию /закрытию) . Одновременно импульс 20 посту гтает на управляющий вход 36 амплитудного детектора 10 (вход ключа 34, шунтирующего конденсатор 33, на фиг. 3). Конденсатор 33 амплитудного детектора 10 разряжается, а открытый ключ 34, шунтирующий его, запрещает работу амплитудного детектора 10. 008Л Импзшьс 2I единичного уровня с выхода Q распределителя 15 импульсов через формирователь 17 импульсов запуска поступает на управляю-. щий вход ключевого элемента 7 выходного усилителя I мощности и приводит к его замыканию и подключению напряжения источника питания к обмотке 3 электромагнитного двигателя Одновременно импульс 21 поступает на управляющий вход 36 амплитудно- . го детектора 11, размыкая его ключ 34, шунтирующий конденсатор 33 (фиг. 3), разрешая запоминание и хранение нового экстремума 27 напря жения, поступающего с выхода датчика 9 тока на сигнальный вход 35 амплитудного детектора 11. Сравнение мгновенных значений напряжений 26 и 27 на компараторе 13 приводит к формированию на его выходе импульса 28, посредством которого происходит дапьнейшее поочередное переключение (коммутация) обмоток 2 и 3 электромагнитного двигателя. В дальнейшем процесс коммутации обмоток 2 и 3 повторяв ется. Так как момент коммутации определяется не уставкой тока, а информацией, полученной с датчика тока о моменте перемещения якоря, то изменение внешних параметров, например . напряжения источника питания или механической нагрузки, не влияет на работу устройства поочередной коммутации обмоток электромагнитного двигателя, что повышает надежность работы, Применение данного способа управления электромагнитным преобразо-. вателем позволяет повысить КПД электромагнитного двигателя, максимально использовать электромагнитную энергию, поступающую в его обмотки, так как коммутация их происходит сразу после окончания перемещения, а не при достижении током установившегося значения. При таком способе управления увеличивается быстродействие системы и улучшается плавность хода при длинноходовом перемещении.
-ца
2
.м
10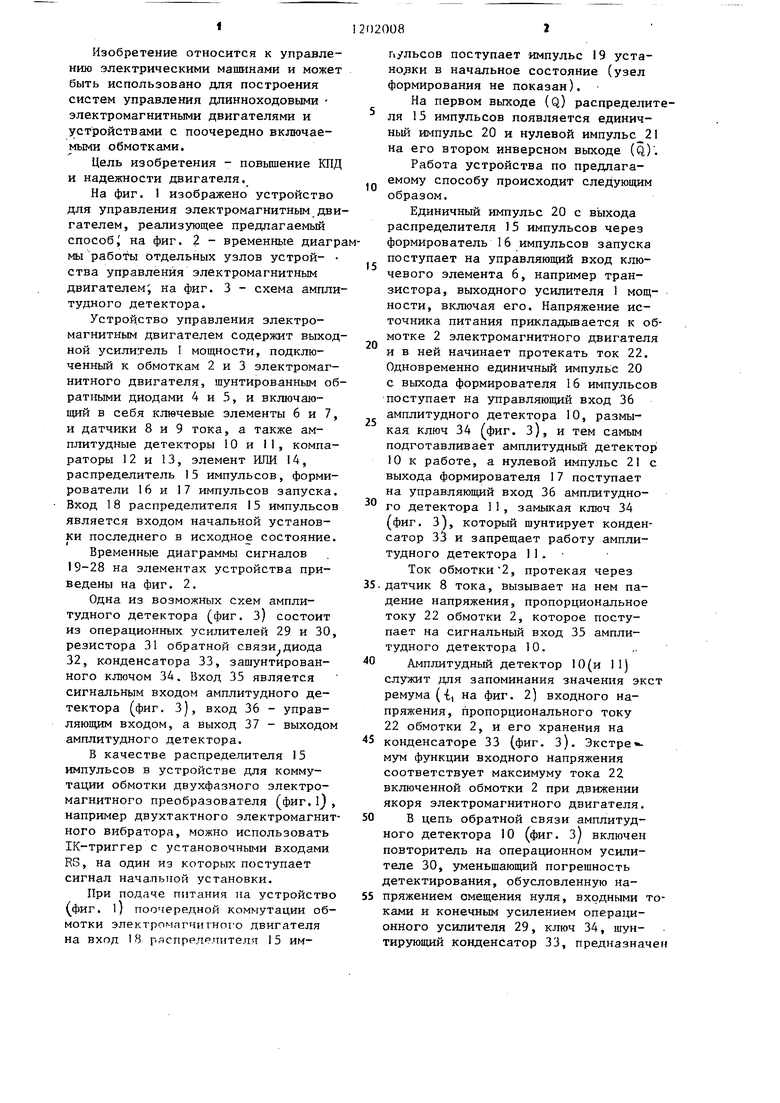
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления @ - фазным шаговым двигателем | 1984 |
|
SU1265964A1 |
| Устройство для управления электромагнитом | 1984 |
|
SU1247952A1 |
| Устройство для управления электромагнитом | 1985 |
|
SU1295459A1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| Устройство для управления многофазным шаговым электродвигателем | 1982 |
|
SU1037410A1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1138919A1 |
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| Дуплексная система телемеханики по проводам электрической сети | 1988 |
|
SU1540015A1 |
| Устройство для управления многофазным шаговым двигателем | 1981 |
|
SU961090A1 |
| Преобразователь переменного напряжения в постоянное | 1985 |
|
SU1270849A1 |
СПОСОБ КОММУТА1ЩИ ОБМОТКИ ЛИНЕЙНОГО ЭЛЕКТРОМАГНИТНОГО ДВИГАТЕЛЯ, состоящий во включении обмотки, измерении протекающего через нее тока, отключении обмотки при достижении определенной силы тока, о тличающийся тем, , что, с целью повьшения КПД и надежности двигателя, при каждом включении обмотки запоминают величину первого максимума тока, затем сравнивают ток обмотки с этим значением и при их равенстве отключают обмотку. (Л
Ч
16
И
Q
CDi/г./
| Устройство для управления шаговымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU801217A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1975 |
|
SU743154A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ратмиров Ъ.А., Основы программного управления станками | |||
| М.: Машиностроение, 1978, с | |||
| Прибор для запора стрелок | 1921 |
|
SU167A1 |
