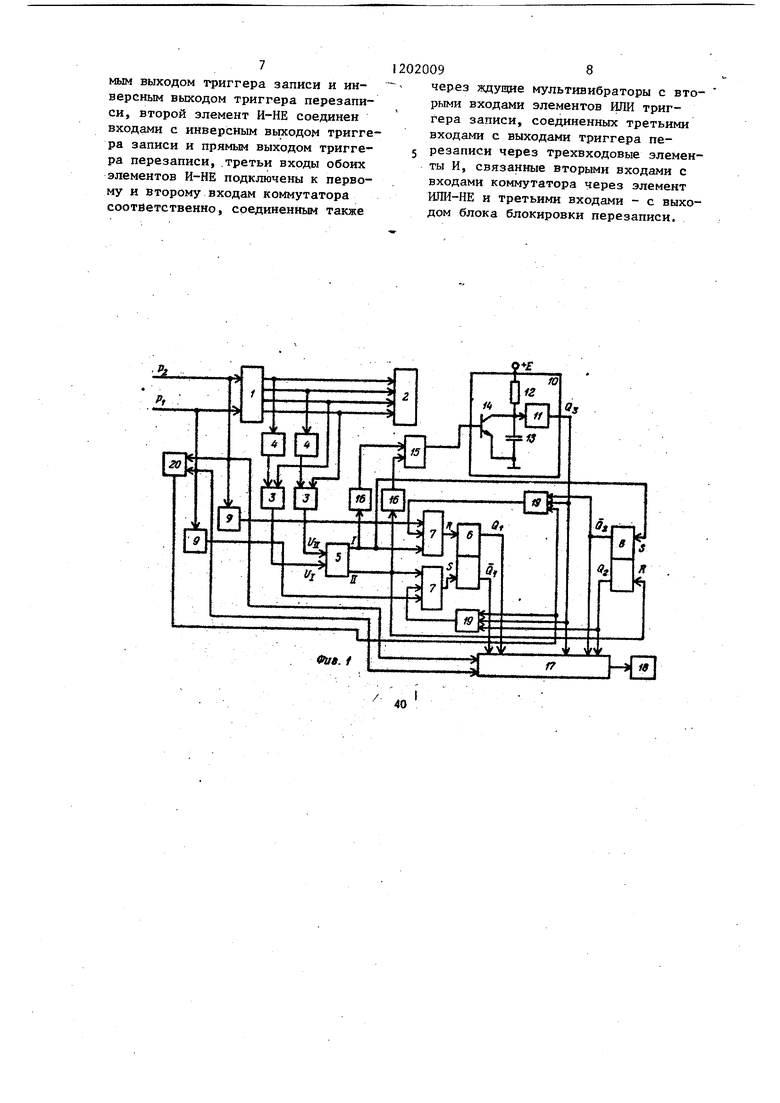
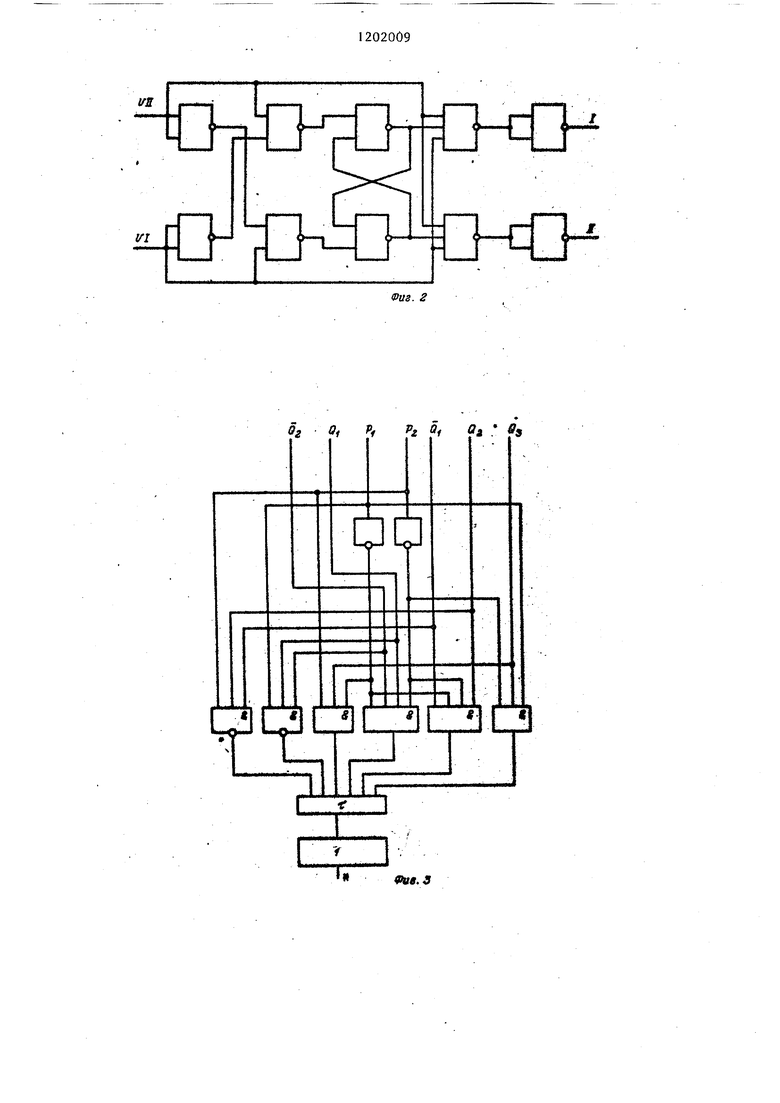
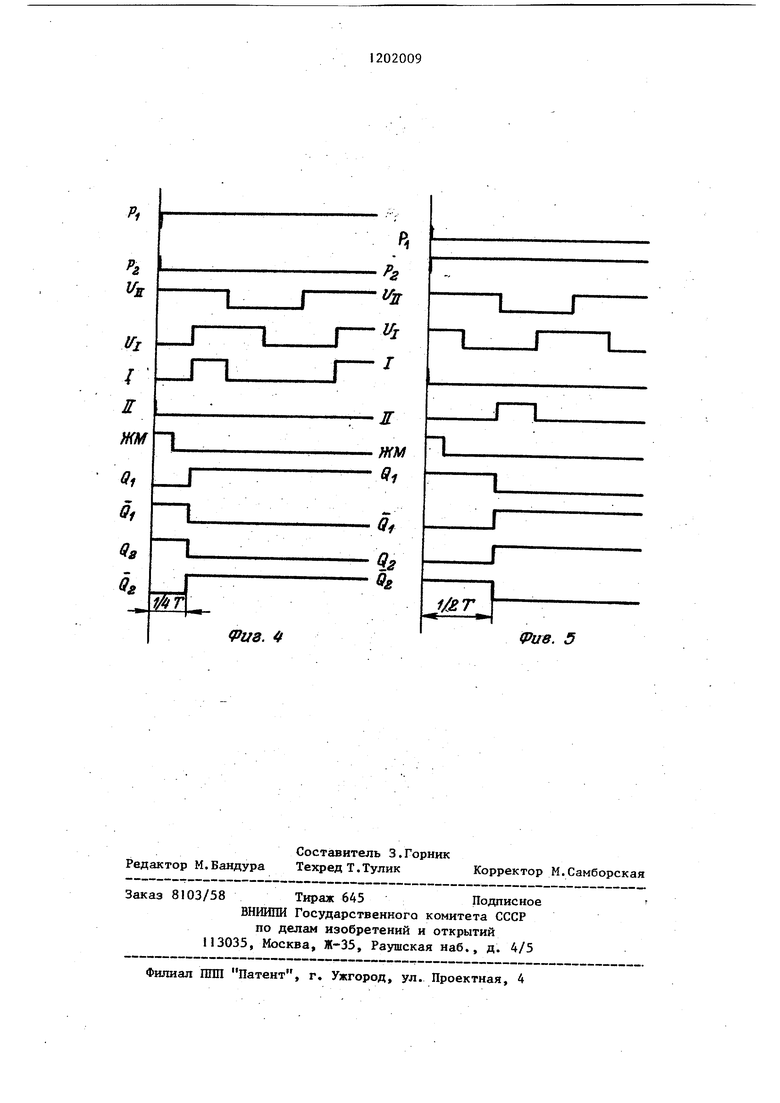
Изобретение относится к электро технике, а именно к системам управ ления с шаговыми двигателями. Целью изобретения является упрощение и расширение функциональных возможностей устройства. На фиг. 1. приведена функциональ ная схема устройства; на фиг. 2 один из вариантов реализации блока определения нацравления- движения; на фиг. 3 - адин из вариантов реал зации логического блока; а на фиг. и 5 - временные диаграммы сигналов поясняюшрне работу устройства. Устройство (фиг. 1) содержит коммутатор 1 фаз шагового двигателя 2 с двумя входами f, 2 менты И 3, инверторы 4, блок 5 определения направления движения, RS триггер 6 записи фазы с трехвходовыми элементами ИЛИ 7 на входах, RS-триггер 8 перезаписи фазы, ждущие мультивибраторы 9, блок 10 бло кировки перезаписи, включающий в себя пороговый злемент 1, резисто 12, конденсатор I3 и ключ 14 р зряда конденсатора, злемент ИЛИ 15, дифференцирующие цепи 16, логический блок 17, сигнальное устройство 18, трехвходовые элементы 19 и эле мент ИЛИ-НЕ 20. Элементы И 3 подключены попарно к двум смежным выходам коммутатора -1 непосредственно, а к двум другим - через инверторы 4. Триггеры 6 и 8 подключены противоположными входами к выходам блока 5 определения направления движения Блок 10 блокировки перезаписи подключен входом, которым является управляющий вход ключа 14, к выход элемента ИЛИ 15, соединенного обоими входами с выходами дифференцирующих цепей 16. Входы дифференцирующих цепей 16 подключены к вьЬсод блока 5 определения направления дв жения. Логический блок 17 соединен входами с выходами Q, Q,, Q, Q триггеров 6, 8 и выходом Q,блока 1 блокировки перезаписи. Выход блока 17 подключен к входу сигнального устройства 18. На фиг. 2 приведена схемная реализация блока 5 на типовых логических элементах. Устройство работает следующим образом. При отсутствии заявки на движение, когда на входах коммутатора 1 09. 2 действуют нулевые сигнапы Р,, две из четырех фаз двигателя 2 находятся под током, а две другие обесточены, и на входы блока 5 определения направления движения посту- пают потенциальные сигналы U, и U,, в любых сочетаниях (по схеме полного перебора). На временной диаграмме /фиг. 4| в качестве примера показаны логические сигналы Uj- 0 и . Триггер 8 перезаписиустанавливается в одно из устойчивых состояний. На выходах 1 и II блока5 определения направления движения под действием нулевого сигнала Uj возникают потенциальные нулевые сигналы. Поэтому на выходах дифференцирующих цепей 16 действуют нулевые напряжения, вследствие чего ключевой элемент 14. находится в закрытом состоянии, конденсатор 13 заряжен и на выходе порогового элемента 11 устанавливается сигнал логической едини цы, который поступает на вторые входы элементов И 19. На третьи входы элементов И 19 также поступает сигнал логической единицы с элемента ИЛИ-НЕ 20. Поскольку на двух из трех входах элементов И I9 действуют сигналы логической единицы, происходит перезапись информации из триггера 8 в триггер 6, т.ак как единичный сигнал с одного из выходов триггера 8 через соответствующие элементы И 19 и ИЖ 7 проходит на вход триггера 6. Таким образом, если , , то Q, l , Q,Q, т.е. триггеры 6 и 8 устанавливаются в одинаковое состояние (фиг.4). Рассмотрим работу устройства в режиме движения. Предположим, что входным сигналам Р| 1, (фиг. 4) соответствует движение вверх, при котором фазы двигателя переключаются в прямой последовательности, а сигналам , Р„ (фиг. 5) - движение вниз и обратньй порядок чередования фаз. По любому из единичных сигналов движения элемент ШШ-НЕ 20 переводится в нулевое состояние и сигнал логического нуля, воздействуя на соответствующие входы И 19, препятствует перезаписи информации из триггера 8 в триггер 6. При прямом порядке коммутации фаз .двигателя 2 фазовый сдвиг if между напряжениями U, и U,, на входах блока 5 определения направления движения равен , при обратном (f /2 , .
При ( на выходе I этого блок возникают импульсы, устанавливающие триггеры 6 и 8 в состояние Q,l и .
При СР / импульсы возникают на выходе П блока 5, в то время., как на выходе 1 действует нулевой сигнал. В результате триггеры 6 и 8 переходят в противоположное состояние и Q,0, а .
Таким образом, независимо от направления движения на одном из выходов блока 5 определения направления движения всегда присутствует импульсный сигнал, который поступает на одну из дифференцирующих цепей 16, на выходе которой выделяются импульсы. По этим импульсам открывается ключевой элемент 14 и разряжается конденсатор 13, в результате чего noporoBbiff элемент 11 переходит в другое устойчивое состояние и 0,
При движении вверх Р(1, , Q 0,а при движении вниз Р,0, , Q,0, , т.е. при исправной работе устройства и наличии сигнала на движение триггеры 6 и 8 находятся в противоположных состояниях, а блок 10 блокировки перезаписи устанавливается в нулевое положение.
В переходном процессе (фиг. 4, 5 когда устройство из режима останов переходит в режим движения (вверх или вниз), либо во время реверса, происходит скачкообразное изменение сигналов Р | и Р . Ждущие мультивибраторы 9 запускаются от положительных перепадов этих сигналов и формируют на своих выходах импульсы (ЖМ на фиг. 4 и 5) . .Эти импульсы воздействуют на триггер 6. таким образом, что если устанавливается P и , то триггер 6 переводится в состояние Q,0. И, наоборот, при задании , Р, 0, получим Q 1. Это означает, что в переходном процессе триггер 6 первоначально устанавливается в заведомо ложное состояние. Однако, как следует из временньпс диаграмм фиг. 4 и 5, если устройство работает правильно, то через время, не превьшающее 1/2 Т (т - период комму тации четырех фаз, триггер 6 перейдет в истинное состояние, соответствующее установившемуся режиму движения . Поэтому для исключения ложного сигнала на выходе сигнального устройства 18 в переходном процессе
5 в логическом блоке 17 предусмотрена временная задержка, причем время задержки выбирается не менее 1/2 Т.
Рассмотрим работу устройства при
10 неисправностях. Основные и наиболее трудно выявляемые отказы устройства можно свести к трем группам неисправностей, ведущих к следующим последствиям:
15. О коммутация обмоток двигателя при отсутствии задания на движение (несанкционированное движение)i
2)отсутствие коммутации при наличии задания на движение (отсутствие
20 движения) ;
3)коммутация обмоток не в заданной очередности (движение в направлении, противоположном заданному).
В первом случае выявление неисправности осуществляется логическим блоком 17 согласно уравнению
Нгр,р,в,а,ГрЛй,,
которое обращается в единицу, когда
30
триггеры 6 и 8 устанавливаются в противоположные состояния ( или .j) при отсутствии задания на движение (Р , При исправной работе устройства, если P , 35 то и .
Во втором случае сигнал неисправности формируется логическим блоком 17 по уравнению
H2 P,PjQ,vp,.
40
Сигнал , если при наличии задания на движение (Р,Р 1 или l) пороговый элемент 11 находится в. 45 состоянии, при котором Q,l.
При исправной работе устройства при Р, , Рг 1 сигнал и . Наконец, в третьем случае логический блок 17 выявляет неисправность по уравнению
H,P,(5,Q,,Q,n.
При исправной работе коммутатора 1. сигнал Н принимает нулевое значение, поскольку ., и 1. Поэтому общее уравнение, описывающее алгоритм работы логического блока 17, имеет вид
H.H,H,4H5 P,,
P,PjQ,,. .
Ha фиг. 3 приведена одна из возможных реализаций логического блока включающего в себя четыре элемента -И, два элемента И-НЕ, два инвертора элемент ИЛИ и элемент задержки .
При появлении логического единичного сигнала на выходе блока 17 сигнальное устройство 18 дает сигнал о неисправности управляющего устройства. Этот сигнал может быть использован для блокировки сигналов управления и остановки шагового двигателя 4 I
Преимуществом предлагаемого устройства является то, что, наряду с указанными неисправностями, оно обепечивает выявление любых других характерных отказов коммутатора, . которые вызьгоают нарушение коммутации хотя бы одной из четырех фаз двигателя (при этом остальные три обмотки коммутируются нормально). В этом случае в одной из фаз двигателя ток протекает непрерьгоно либо не протекает совсем. На входе одного из элементов И 3 или одного из инверторов 4 действует логический сигнал, принимающий нулевое или единичное значение. При нулевом сигнале на входе И 3 или единичном сигнале на входе инвертора 4 возникает нулевой сигнал на одном из входов блока 5 определения направления движения. Это ведет к появлению нулевых логических сигналов на обоих выходах блока 5 и исчезновению импульсов, управляющих ключом 14. В результате конденсатор 13 заряжается, устанавливая пороговый элемент 11 в состояние , которое соответствует отсутствию задания на движение. Логический блок I7 обнаруживает эту неисправность вышеуказанным способом, формируя сигиал Hi, 1.
Таким образом, в предлагаемом устройстве простыми средствами обеспечивается автоматический контроль работы устройства для управления шаговым двигателем, который позволяет выявить практически все возможные неисправности без участия оператора при простой схеме контроля.
Формула изобретения
Устройство для управления четырехфазным шаговым двигателем, содержащее коммутатор с двумя входами и четырьмя выходами, на которых формируются напряжения прямоугольной формы, элементы И, подключенные входами к смежным фазам двигателя, соединенным с выходами коммутатора, и-блок сигнализации, отличающееся тем, что, с целью упрощения и расширения функциональных возможностей, в него 5 введены блок,определения направления движения, подключенный к выходам элементов И, триггер записи информации о направлении движения с элементами ИЛИ на входах,триггер
0 перезаписи информации о направлении движения, подключенные разноименными входами к выходам блока определения направления движения, блок блокировки перезаписи, включающий
5 в себя пороговый элемент и интегрирующую цепь с разрядным ключом на выходе, подключенный входом через элемент ИЛИ и дифференцирующие цепи к выходам блока определения
0 направления движения, два зкдущих мультивибратора, два трехвходовых элемента И и логический блок выявления неисправности, включающий в себя четыре дополнительных элемента И, два элемента И-НЕ, два инвертора и элемент ИЛИ, соединенный входами с выходами дополнительных элементов И и И-НЕ, выход которого является выходом логического блока
Q выявления неисправности, причем первый дополнительный элемент И подключен входами к прямому и инверсному выходам триггеров записи и перезаписи информации о направлении
5 движения и через инверторы - к входам коммутатора, второй дополнительный элемент И подключен к выходам инверторов, инверсному выходу триггера записи и прямому выходу триггера перезаписи, третий дополнительный элемент И подключен к первому и через инвертор - к второму входам коммутатора и выходу блока блокировки перезаписи, а четв1ертый дополнительный элемент И подключен к второму и через инвертор - к первому входам коммутатора и выходу блока блокировки перезаписи, первый элемент И-НЕ соединен входом с прямым выходом триггера записи и инверсным выходом триггера перезаписи, второй элемент И-НЕ соединен входами с инверсным выходом триггера записи и прямым выходом триггера перезаписи, .третьи входы обоих элементов И-НЕ подключены к первому и второму входам коммутатора соответственно, соединенным также
12020098
через ждущие мультивибраторы с вторыми входами элементов ИЛИ триггера записи, соединенных третьими входами с выходами триггера перезаписи через трехвходовые элементы И, связанные вторыми входами с входами коммутатора через элемент ИЛИ-НЕ и третьими входами - с выходом блока блокировки перезаписи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1991 |
|
RU2032265C1 |
| Устройство для обнаружения отказов в шаговом электроприводе | 1988 |
|
SU1511843A1 |
| Устройство для программного управления шаговым двигателем | 1989 |
|
SU1675850A1 |
| Распределитель импульсов для управления шестифазным шаговым двигателем | 1990 |
|
SU1830612A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Устройство для автоматической настройки дугогасящего плунжерного реактора | 1986 |
|
SU1390704A1 |
| Устройство для обнаружения отказов в шаговом электроприводе | 1989 |
|
SU1640811A1 |
| Устройство для регистрации информации | 1989 |
|
SU1603412A1 |
| Устройство определения азимута | 1984 |
|
SU1190746A2 |
Изобретение относится к системам управления шаговыми двигателями. Оно направлено на расширение функциональных возможностей и упрощение устройства для управления четырехфазным шаговым двигателем. Устройство содержит коммутатор, элементы И и блок сигнализации. Для выявления практически всех возможных неисправностей работы устройства в него введены блок определения направления движения, триггер записи информации о направлении движения, триггер перезаписи информации о направлении движения, блок блокировки перезаписи, два ждупщх мультивибратора, два двухвходовых элемента И и логический блок выявления неисправности. 5 ил.
1;
VS
VI
Ог Q, PI PZ QI Оя . 9
I. I
HI
(pjja. f
| Устройство для управления четырехфазным двигателем переменного тока | 1980 |
|
SU886182A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления многофазным шаговым двигателем | 1976 |
|
SU547955A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
