Изобретение относится к механизации сборочных работ с применением резьбовых соединений, а точнее с применением самонарезающего крепежа, которое может быть использов а- но в машиностроении, приборостроении и других областях техники.
Целью изобретения является расширение технологических возможностей путем установки на винтоверте шнеков, кинематически связанных с завинчивающим инструментом.
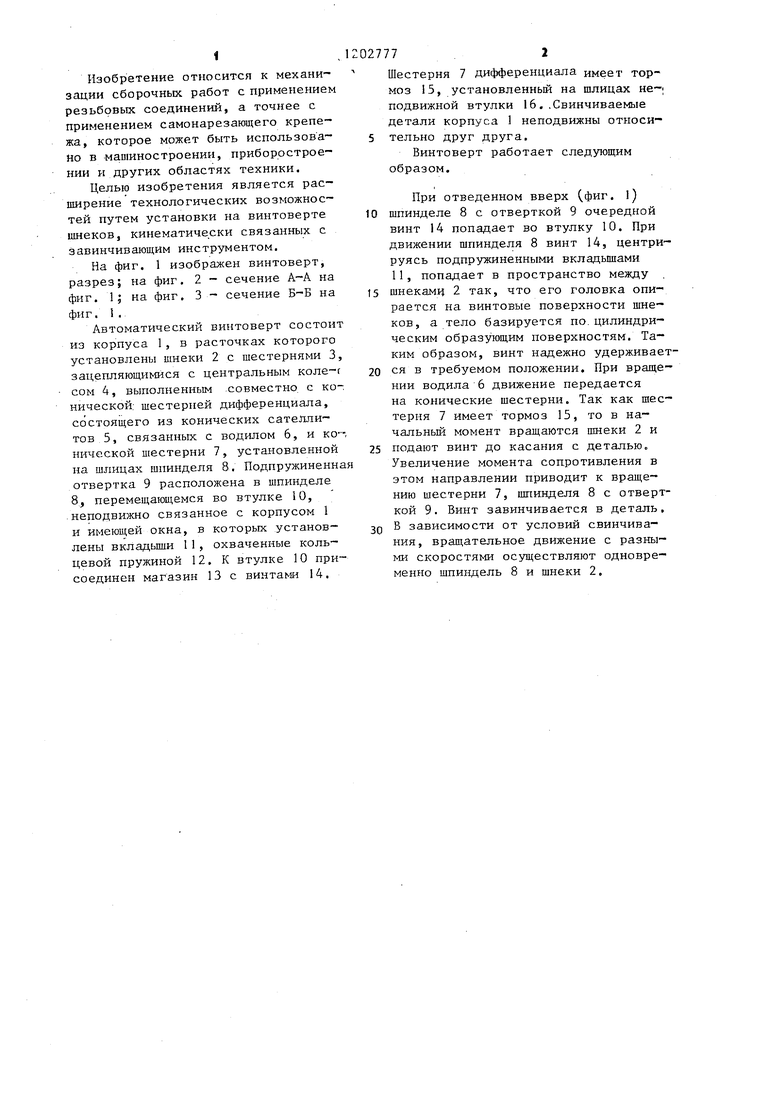
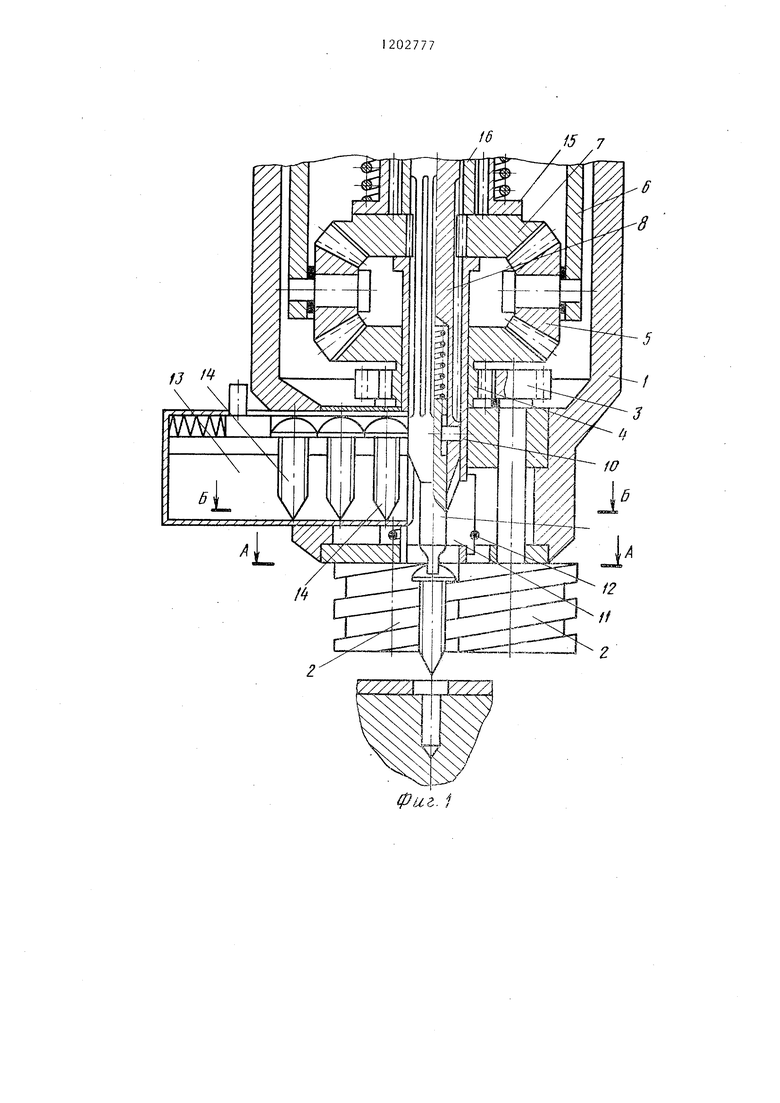
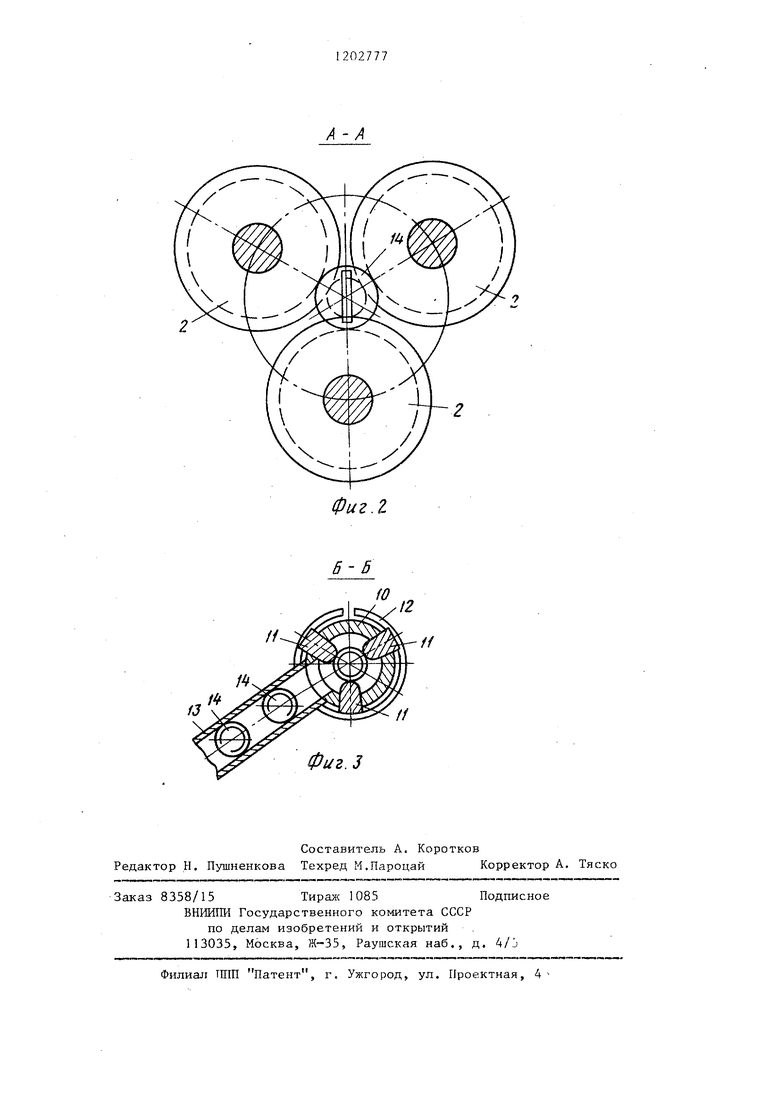
На фиг. 1 изображен винтоверт, разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1,
Автоматический винтоверт состоит из корпуса 1, в расточках которого установлены шнеки 2 с шестернями 3, зацепляющимися с центральным коле-г сом 4, выполненным .совместно, с конической: шестерней дифференциала, состоящего из конических сателлитов 5, связанных с водилом 6, и ко- нической шестерни 7, установленной на шлицах шпинделя 8. Подпружиненна отвертка 9 расположена в шпинделе 8, перемещающемся во втулке 10, .неподвижно связанное с корпусом 1 и имеющей окна, в которых установлены вкладьш1и 11 , охваченные кольцевой пружиной 12. К втулке 10 присоединен магазин 13 с винтами 14.
2777 . 2
Шестерня 7 дифференциала имеет тормоз 15, установленньй на шлицах не-; подвижной втулки 16. .Свинчиваемые детали корпуса 1 неподвижны относи- 5 тельно друг друга.
Винтоверт работает следующим образом.
При отведенном вверх (фиг. 1)
10 шпинделе 8 с отверткой 9 очередной винт 14 попадает во втулку 10. При движении шпинделя 8 винт 14, центрируя сь подпружиненными вкладьш1ами 11, попадает в пространство между
15 шнеками 2 так, что его головка опирается на винтовые поверхности шнеков, а тело базируется по.цилиндрическим образующим поверхностям. Таким образом, винт надежно удерживает20 ся в требуемом положении. При вращении водила 6 движение передается на конические шестерни. Так как шестерня 7 имеет тормоз 15, то в начальный момент вращаются шнеки 2 и
25 подают винт до касания с деталью. Увеличение момента сопротивления в этом направлении приводит к вращению шестерни 7, шпинделя 8 с отверткой 9. Винт завинчивается в деталь,
3Q В зависимости от условий свинчивания, вращательное движение с разными скоростями осуществляют одновременно шпиндель 8 и шнеки 2.
Фиг. 1
фиг.З
Н
//
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтоверт | 1982 |
|
SU1030154A1 |
| Винтоверт | 1983 |
|
SU1118521A1 |
| Винтоверт | 1987 |
|
SU1472204A1 |
| Устройство для сборки крепежных элементов | 1981 |
|
SU973336A1 |
| Винтоверт | 1987 |
|
SU1618562A2 |
| Винтоверт | 1971 |
|
SU490644A1 |
| Винтоверт | 1978 |
|
SU841953A1 |
| Винтоверт | 1982 |
|
SU1098744A1 |
| Винтоверт | 1978 |
|
SU730561A1 |
| Винтоверт | 1977 |
|
SU878567A1 |
Составитель А. Коротков Редактор Н. Пушненкова Техред М.Пароцай Корректор А, Тяско
Заказ 8358/15 Тирал 1085Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/j
Филиал ТШП Патент, г. Ужгород, ул. Проектная, 4
| Яхимович В.А | |||
| и др | |||
| Автоматизация сборки резьбовых соединений | |||
| К.; Вища школа, 1982, с | |||
| Реверсивный дисковый культиватор для тросовой тяги | 1923 |
|
SU130A1 |
