Изобретение относится к автоматике и может быть использовано в системах автоматического регулирования и преобразования информации, в частности в преобразователях угла поворота вала в цифровой код.
Целью изобретения является повышение точности преобразования угла поворота в электрический сигнал.
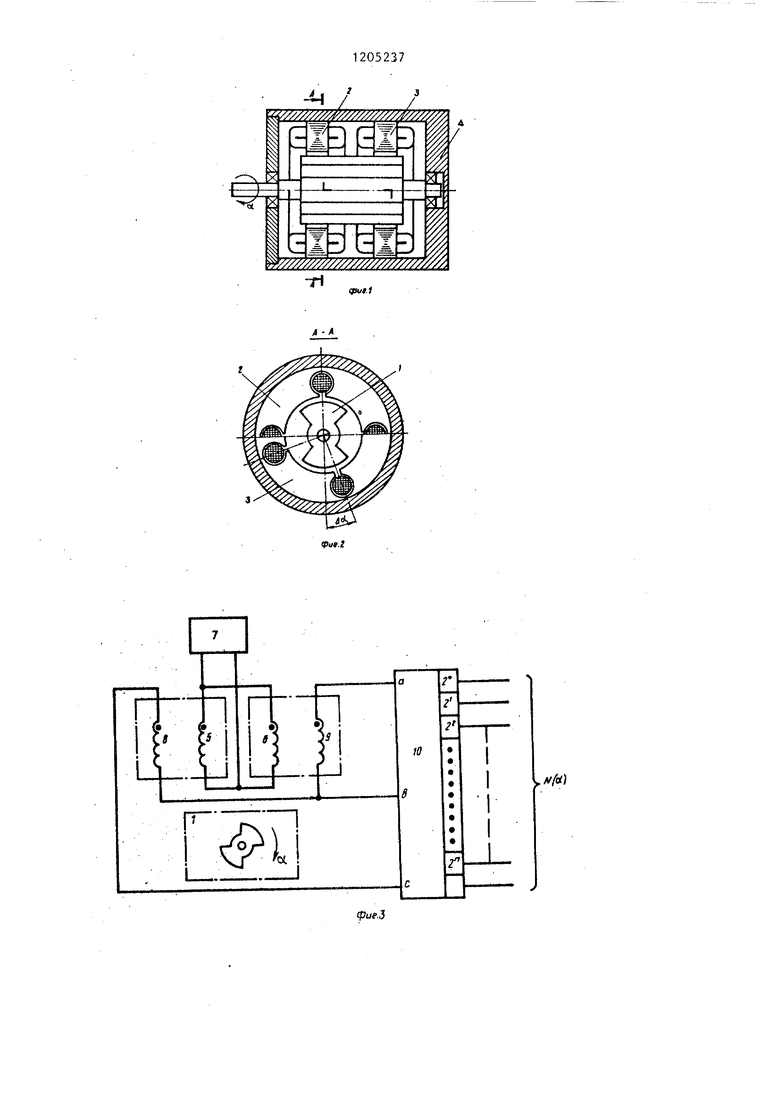
На фиг, 1 изображен датчик, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - электрическая схема индукционного датчика на фиг. 4 - структурная схема блока преобразования I на фиг. 5 - выходные характеристики индукционного датчика.
Индукционный датчик содержит общий ротор 1 и два статора 2 и 3, установленных в корпусе 4 с относительным разворотом друг относительно друга (см. фиг. 1). Обмотки возбуждения и выходные обмотки выполнены сосредоточенными и размещаются взаимно перпендикулярно в четырех пазах каждого статора. Обмотки возбуждения 5 и 6 (фиг. 3) соединяются параллельно и подключаются к источнику 7 переменного напряжени с выходным напряжением
и,
ипч
и sin U t.
На выходных Обмотках датчика 8 и 9 формируются сигналы
и
4oi ,
0(
и sincotf, (-Ьу) К
.и.
sin ы tf (otAix
2
К.
где К, - коэффициент, учитывающий температурные погрешности (самого датчика и источника переменного напряжения) 5
f и f - функциональные зависимости выходных напряжений датчика от угла поворота ротора 1.
Поскольку эти зависимости определяются лишь геометрией магнитопрово- дов, то с высокой степенью точности можно принять f, fg f. Сигналы UQ, и Uo2 с выходных обмоток 8 и 9 датчика подаются в блок преобразования 10, который, во-первых, определяет отделение суммы напряжений
UQ, и Ugj к их разности в цифровом виде
{
i«. , /
ot+-5-j + (,
iiA Т)
(2)
L, ,1 uotN ,/ ых.
П т|-Н -т-)
и, во-вторых, умножает полученный результат N.|, () на поправочный коэффициент Kp(N):
N(cu) Kp (N) Np(«t),
где N (ot) - выходной n-разрядный
двоичный код блока преобразования 10.
Из выражения (2) видно, что величина Np(«,) не зависит ни от частоты со t, ни от амплитуды U выходного напряжения источника 7 переменного напряжения, ни от коэффициента температурной погрешности. Например, при линейной зависимости напряжений выходных обмоток от угла поворота ротора 1,т.е. при иэ уравнения (2) следует: N (об) при синусоидальной N. (об) ctg- tgei, при
косинусоидальной N. (ei) ctg- ctgcu.
Рассмотренные частичные случаи подтверждают вывод о том, что получаемая в результате преобразоваНИИ по формуле (2) величина кода NP (о() определяется только углом начального разворота А od статоров 2 и 3 и углом поворота л , причем, изменяя величину А об , можно в широких пределах варьировать крутизну выходной характеристики Np(oc). Следовательно, зависимость N. (oi) представляет собой стабилизированную (приведенную) характеристику индукционного датчика,
Поскольку при простой геометрии магнитопроводов и сосредоточенных обмотках датчика высокую линейность выходного напряжения от угла поворота получить невозможно, для уменьшения погрешностей полученная величина N(,(06) домножается на поправочный (тарировочный) коэффициент Кр(М), который определяют экспернментально, и записывается в постоянное запоминающее устройство.
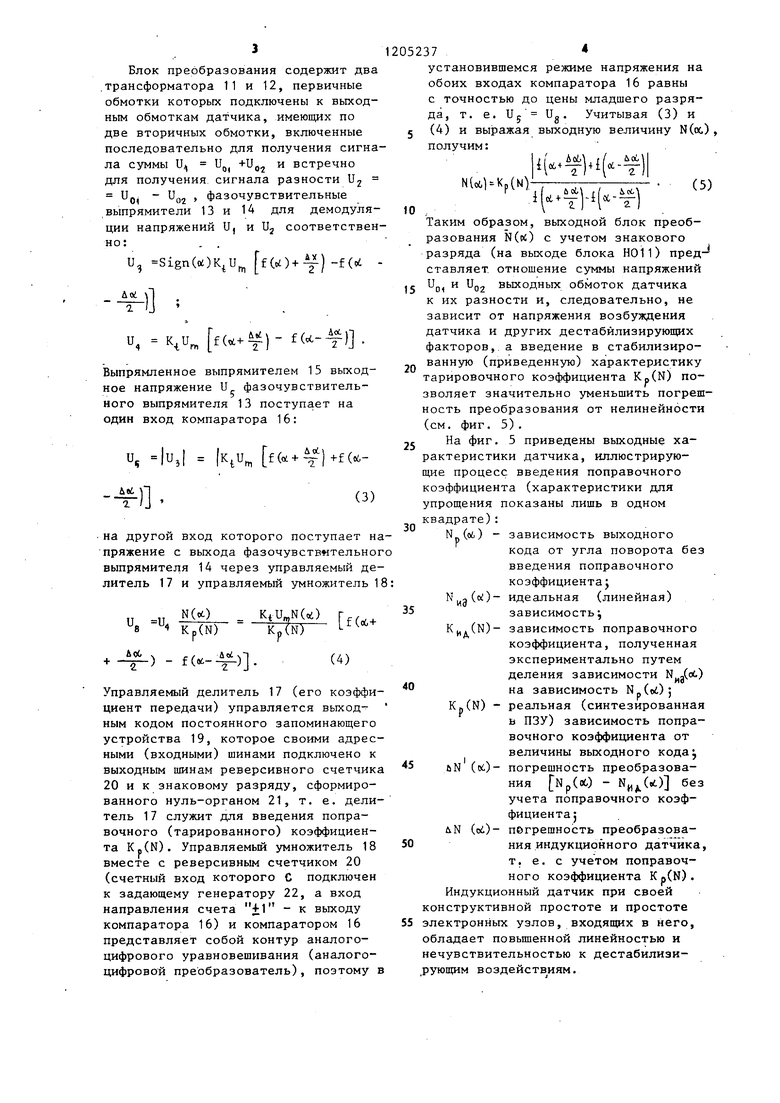
Рассмотрим подробнее работу блока преобразования 10 (фиг. 4).
Блок преобразования содержит два .трансформатора 11 и 12, первичные обмотки которых подключены к выходным обмоткам датчика, имеющих по две вторичных обмотки, включенные последовательно для получения сигнала суммы и UQI +Ug2 и встречно для получения сигнала разности U
и
оч
- Ug- , фазочувствительные
выпрямители 13 и 14 для демодуляции напряжений U, и Uj соответственно:
и Sign(ii) fU)) -f( - -)1
2. J .
и, K,u,fU.)-fU-f:).
Выпрямленное выпрямителем 15 выходное напряжение U фазочувствитель- ного выпрямителя 13 поступает на один вход компаратора 16:
и, |из1 f(i + )+fU),(3)
йсб г
на другой вход которого поступает напряжение с выхода фазочувств«тельного выпрямителя 14 через управляемый делитель 17 и управляемый умножитель 18:
UB
N(c6)
() г
Kp(N)
(4)
Управляемый делитель 17 (его коэффициент передачи) управляется выход- ным кодом постоянного запоминающего устройства 19, которое своими адресными (входными) шинами подключено к выходным шинам реверсивного счетчика 20 и к знаковому разряду, сформированного нуль-органом 21, т. е. делитель 17 служит для введения поправочного (тарированного) коэффициента K.(N). Управляемый умножитель 18 вместе с реверсивным счетчиком 20 (счетный вход которого С подключен к задающему генератору 22, а вход направления счета 41 - к выходу компаратора 16) и компаратором 16 представляет собой контур аналого- цифрового уравновешивания (аналого- цифровой преобразователь), поэтому в
установившемся режиме напряжения на обоих входах компаратора 16 равны с точностью до цены младшего разря
да,
т. е.
V Ug. Учитывая (3) и
(4) и выражая выходную величину N(oc,) ,
получим:
ИAo 1/
..: ... ., ... (5)
1 / йЛ , / io,
iU.-)-i(oc--)
,
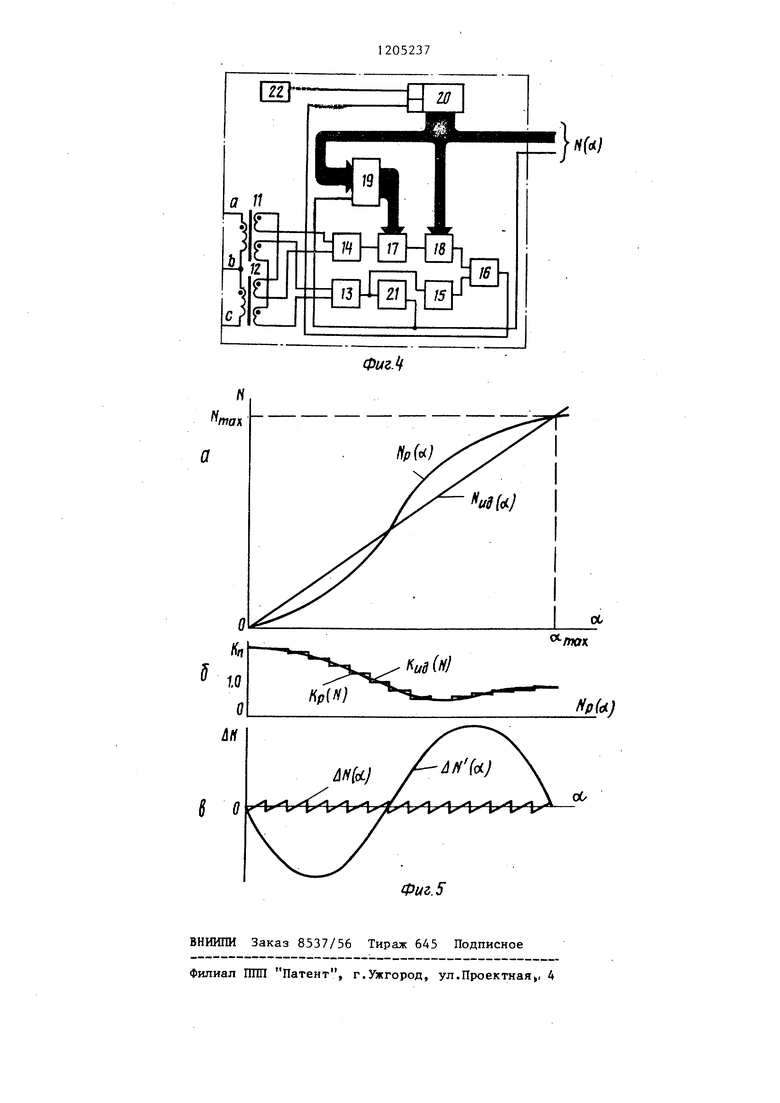
Таким образом, выходной блок преобразования N() с учетом знакового разряда (на выходе блока Н011) пред- ставляет отношение суммы напряжений Up, и Uo2 выходных обмоток датчика к их разности и, следовательно, не зависит от напряжения возбуждения датчика и других дестабилизирующих факторов, а введение в стабилизиро- ванную (приведеннук|) характеристику тарировочного коэффициента Kp(N) позволяет значительно уменьшить погрешность преобразования от нелинейности (см. фиг. 5).
На фиг. 5 приведены выходные характеристики датчика, иллюстрирующие процесс введения поправочного коэффициента (характеристики для упрощения показаны лишь в одном квадрате):
N (oi,) - зависимость выходного
кода от угла поворота без введения поправочного коэффициента j N,,a() идеальная (линейная)
О
зависимость
Kj,.(N)- зависимость поправочного коэффициента, полученная экспериментально путем деления зависимости (ot) на зависимость N (ei) | Kp(N) - реальная (синтезированная в ПЗУ) зависимость поправочного коэффициента от величины выходного кода, uN (fti)- погрешность преобразования Np(oC) - Nj,() без учета поправочного коэффициента j
iN (oi)- пбгрешность преобразова- ния индукционного датчика,
т. е. с учетом поправочного коэффициента Kp(N). Индукционный датчик при своей конструктивной простоте и простоте электронных узлов, входящих в него, обладает повьппенной линейностью и нечувствительностью к дестабилизирующим воздействиям.
(ful.l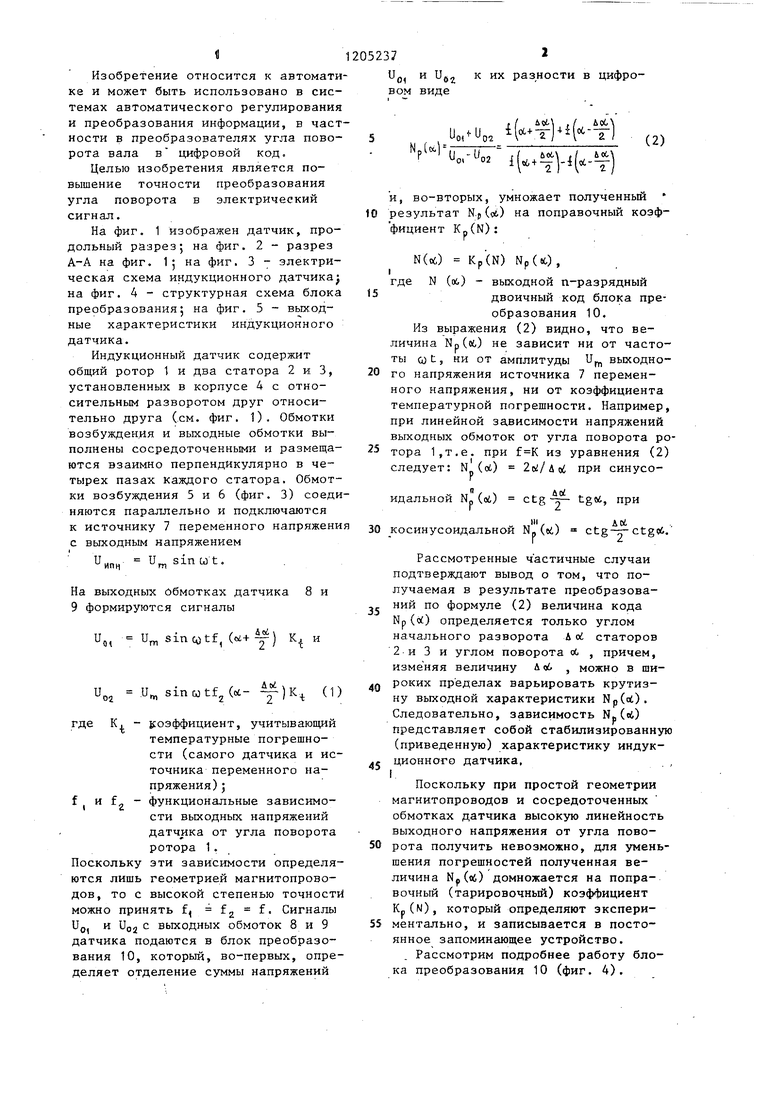
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ преобразования угла поворота вала фазовращателя в код | 1986 |
|
SU1458973A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| Феррозондовый датчик азимута | 1987 |
|
SU1452954A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1985 |
|
SU1295521A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1451861A1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1107142A1 |
| Преобразователь угол-фаза-код | 1983 |
|
SU1153335A2 |
| Преобразователь перемещений в код | 1986 |
|
SU1367158A1 |
VA / J
ФигМ
Фиг. 5
ВНИШШ Заказ 8537/56 Тираж 645 Подписное Филиал ШШ Патент, г.Ужгород, ул.Проектная, А
| Ахметжанов А.А, онный рёдуктосин | |||
| М | |||
| с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пульер Ю.М | |||
| и др, электромеханические преобразователи | |||
| М.: с | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Индукци- : Энергия, 1971, Индукционные функциональные Энергия, 1969, | |||
