Изобретение относится к сельскому хозяйству и может быть использовано на оросительных системах для управления широкозахватными мпогоопорными дождевальными машинами (ДМ).
Цель изобретения - повышение надежности переключения больших расходов с использованием маломощных источников электроэнергии.
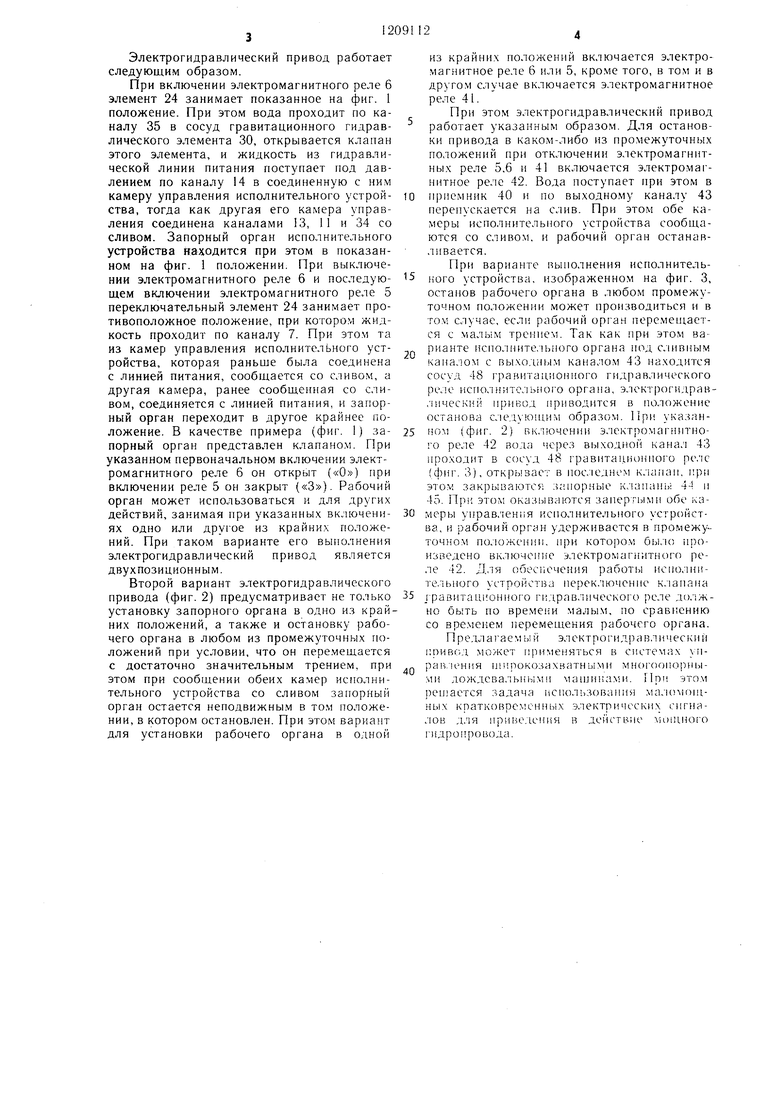
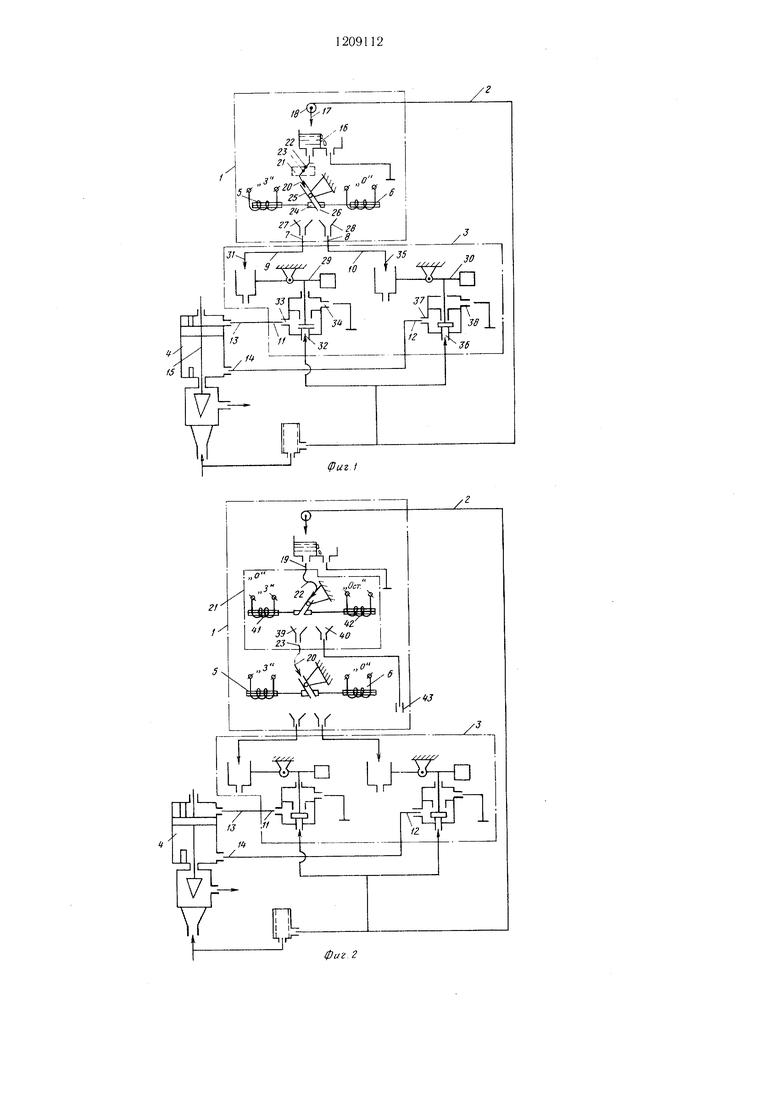
На (зиг. 1 представлен первый (основной) вариант электрогидравлического привода для двухпозиционного управления заиориым органом оросительных систем; на фиг. 2 - дополнительный вариант выполнения электрогидравлического привода, позволяющий при достаточном трении скольжения запорного органа фиксировать пос- . Чедний в любом гфомежл точном положении; lia фиг. 3вариант выполнения исполН1ггс,;1ьного устройства привода для фикса- пни занорного органа в любом нро.межу- roMiioM его нол()женни, при малом трении запорного органа.
Электрогидравличеекий привод содержит (фиг. 1) электрогидравлический преобразо- 1, гидравлическую линию 2 питания с фильтром на входе, гидравлический усилитель 3 н исполпительное устройство 4. Преобразователь имеет входной гидравлический участок и переключатель потока с двумя электромагнитны.ми реле 5 и 6, каждое из которых снабжено обмоткой и подвижным стержнем, а также два выходных гидравлических канала 7 и 8. Гидравлический усилитель имеет входные 9 и 10 и выходные 1 и 12 каналы. Исполнительное устройство имеет две камеры управления с каналами 13 и 14 управления по одному на каждую камеру и управляет подвижным запорным органом с штоком 15. Каждый из выходных каналов преобразователя соединен соответственно е одним из входпчх каналов усилителя, каждый из выходно1х каналов последнего соединен соответственно с одним из каналов управления исполнительного устройства. Входной гидравлический участок преобразователя вьпюлпен гибким и имеет на входе стабилизатор давлепия жидкости в виде переливного сосуда 16 с подводящим каналом 17, содержащим дроссель 18, и отводящим каналом, который имеет начальный 19 и конечный 20 участки и содержит иромежуточный узел 21 с входным 22 и выходным 23 участками. Входной участок промежуточного узла соединен с начальным участком отводящего канала, выходной участок -- с конечным участком отводящего канала. Переключатель потока выполнен в виде трубки с приво.г,ом от .авухнозинионного пе;)еключа- тельного элемента 24 с HJTOKOM, соединенным со стержнями электромагнитных реле. Трубка с нриводом от двух11озициопно1 о переключательно1 о элемента имеет входной участок 25 и выход 26. В переключателе по
0
0
5
0
5
0
5
тока имеются два основных приемника 27 и 28, выполненные в виде воронок, каждая из которых и.меет выходной канал, соединенный соответственно с одним из выходных каналов переключателей потока. Подводящий канал переливного сосуда соединен с гидравлической линией питания через дроссель. Конечный участок отводящего канала гибко соединен с входным участком переключательного элемента, выход которого расположен над одним или другим приемником жидкости.
Гидравлический усилитель содержит гравитационные гидравлические реле 29 и 30. Первое реле содержит канал 31 включения и клапан, имеющий входной канал 32, выходной 33 и сливной 34 каналы. Второе реле содержит канал 35 включения и клапан, име- ЮП1ИЙ входной 36, выходной 37 и сливной 38 каналы. Каждый из каналов включения соединен с соответствующим входным каналом усилителя. Входные каналы обоих клапанов соединены с гидравлической линией питания. Выходной канал каждого из клапанов соединен с соответствующим выходным каналом усилителя.
Во втором варианте электрогидравлического привода (фиг. 2) промежуточный узел выполнен в виде дополнительного переключателя потока, такого же, как и описанный основной переключатель потока. Дополпительпый переключатель потока имеет соответственно донолнительные элементы, в частности, дополнительные приемники 39 и 40 и электромагнитные реле 41 и 42. В дополнительном переключателе входной участок переключательного эле.мента гибко соединен с входным участком нромежуточного узла, выходной канал одного из допол- Н1ггельпых приемников соединен е выходным участком промежуточного узла, выходной канал второго из них (сливной) -- с выходным каналом 43.
При варианте выполнения исполнительного устройства (фиг. 3) каналы управления исполнительного устройства содержат клапаны 44 и 45 с линиями 46 и 47 управления. В этом варианте исполнительное устройство снабжено гравитационным гидравлическим реле с сосудом 48 и клапаном, имеющим подводящий 49 и отводящий 50 каналы. Первый из них соединен с гидравлической линией питания, второй - с линиями управления запорных клапанов 44 и 45. Над сосудом гравитационного реле исполнительного устройства находится выходное отверстие сливного канала донолнительно- го приемника входного электрогидравлического преобразователя.
Варианты выполнения отдельных элементов устройства могут быть различными. Например, двухпозицио}П ый низконапорный Г1ереключательнь й эле.мент может быть выполнен не в виде трубки (фиг. 1 и 2), а в виде перекидного лотка и так далее.
Электрогидравлический привод работает следующим образом.
При включении электромагнитного реле 6 элемент 24 занимает показанное на фиг. 1 положение. При этом вода проходит по каналу 35 в сосуд гравитационного гидрав- лического элемента 30, открывается клапан этого элемента, и жидкость из гидравлической линии питания поступает под давлением по каналу 14 в соединенную с ним камеру управления исполнительного устрой- ства, тогда как другая его камера управления соединена каналами 13, 11 и 34 со сливом. Запорный орган исполнительного устройства находится при этом в показанном на фиг. 1 положении. При выключении электромагнитного реле б и последую- щем включении электромагнитного реле 5 переключательный элемент 24 занимает противоположное положение, при котором жидкость проходит по каналу 7. При этом та из камер управления исполнительного уст- ройства, которая раньше была соединена с линией питания, сообщается со сливом, а другая камера, ранее сообщенная со сливом, соединяется с линией питания, и запорный орган переходит в другое крайнее положение. В качестве примера (фиг. 1) за- порный орган представлен к,:1апано,м. При указанном первоначальном включении электромагнитного реле 6 он открыт («О) при включении реле 5 он закрыт («3). Рабочий орган может использоваться и для других действий, занимая при указанных включени- ях одно или дру1 ое из крайних положений. При таком варианте его выполнения электрогидравлический привод является двухпозиционным.
Второй вариант электрогидравлического привода (фиг. 2) предусматривает не только установку запорного органа в одно из крайних положений, а также и остановку рабочего органа в любом из промежуточных положений при условии, что он пере.мещается с достаточно значительным трением, при этом при сообщении обеих камер исполнительного устройства со сливом запорный орган остается неподвижны.м в том положении, в котором остановлен. При этом вариант для установки рабочего органа в одной
из крайних положений включается электромагнитное реле 6 или 5, кроме того, в том и в другом случае включается электромагнитное реле 41.
При этом электрогидравлический привод работает указанным образом. Для остановки привода в каком-либо из промежуточных положений при отключении электромагнитных реле 5,6 и 41 включается электромагнитное реле 42. Вода поступает при этом в приемник 40 и по выходному каналу 43 перепускается на с. 1ив. При этом обе ка- .меры исполнительного устройства сообщаются со сливом, и рабочий орган останавливается.
При варианте выполнения исполнительного устройства, изображенном на фиг. 3, останов рабочего органа в любом промежуточном положении может производиться и в том случае, есл1 рабочий орг ан пере.мещается с малым трением. Так как при этом варианте исполпите.1ьного органа под с.1ивным каналом с выходным каналом 43 находится сосуд 48 гравитационного гидравлического реле исг1олните;|ьпого органа, элсктрогидрав- лическнй привод приводится в положение останова сле.аующим образом. При указанном (фиг. 2) включении электромагнитного реле 42 вода через выходной канал 43 проходит Б сосуд 48 гравитационпог о pe. ie {фиг. 3), открывает в 1и)с.1еднем к. кшап. при этом закрываются запорные клапапь: 4- п 45. Ilpii этом оказываются запертыми обе камеры управления исполнительного устройства, и рабочий орган удерживается в промежуточном по:1ожен1 11. при котором было произведено включсште электромагнитного реле 42. Для обеспечения работы исполни- тельпого устройства перек. 1юченпс к.чапапа J равиташюнпого гпдравлическогч) реле должно быть по Бреме -:и малым, по сравнению со ape.MeiieM перемещения рабочего органа. П редл агае м ы и электрогидра вл ически и прнвг-д может применяться в системах управ, i сипя П1 ирокезах ватным и многоопорными дождевальными маплпнами. При этом реп1ается задача 11С1 ользовапия Ma. iOMoni- ных кратковременных электрических сигпа- :iOB для приведения в действие MoniHOi O гидропровода.
гч--- гб
L aAfcf ..
Ч /,
30
П
37 ГП гГП -1
//
.«
tf
I I I I
у
фиг.
у
30
П
37 Г
гГП
//
гг
фиг. 2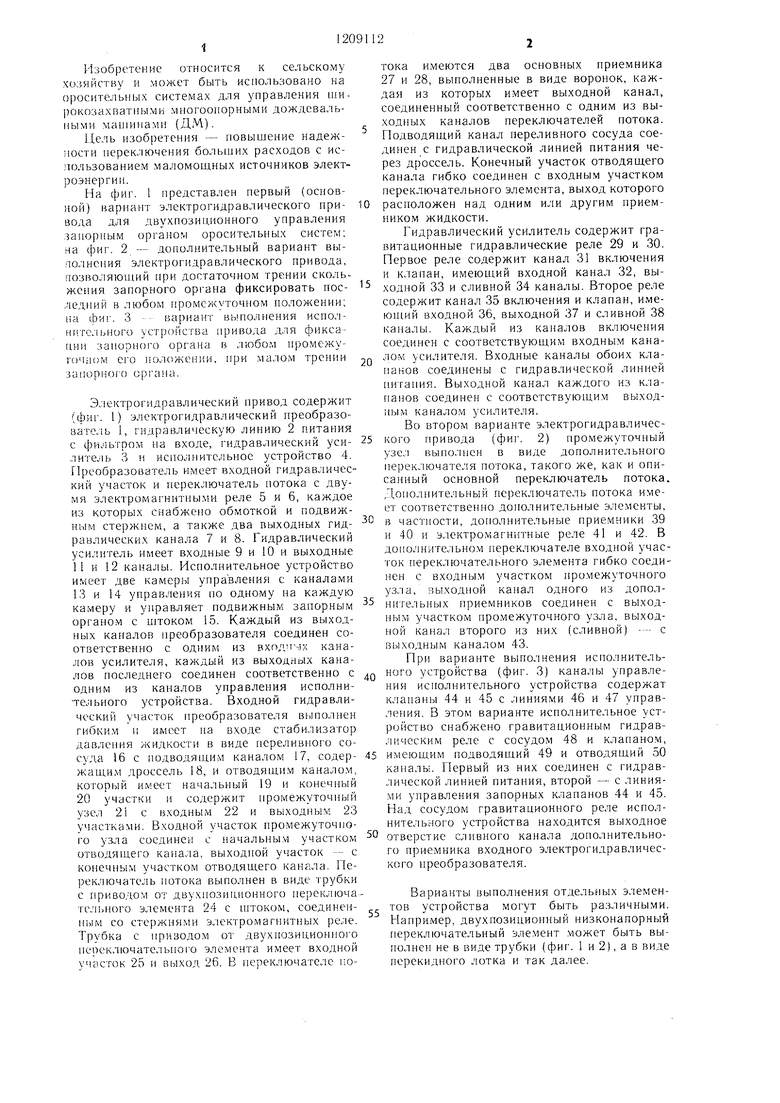
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическое приводное устройство | 1984 |
|
SU1249494A1 |
| Автоматизированная оросительная система | 1985 |
|
SU1429994A1 |
| Устройство управления движением широкозахватной дождевальной машины с опорными тележками | 1985 |
|
SU1318997A1 |
| Дозатор жидкости | 1983 |
|
SU1080122A1 |
| Устройство для регулирования уровня грунтовых вод в осушительно-увлажнительной системе | 1981 |
|
SU1024885A1 |
| Система программного управления многоопорной дождевальной машиной кругового действия | 1987 |
|
SU1556594A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1119928A1 |
| Автоматизированная оросительная система | 1982 |
|
SU1098534A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1969 |
|
SU241137A1 |
| Устройство управления подачей жидкости | 1985 |
|
SU1312537A1 |
фиг.З
| Автоматизированная оросительная система | 1982 |
|
SU1098534A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидравлический следящий привод./Под ред | |||
| Лешенко В | |||
| А | |||
| М.: Машиностроение | |||
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Приспособление для автоматического перевода стрелок машинистом | 1922 |
|
SU463A1 |
