Изобретение относится к подъем- но-т ранспортной технике, в частности к магнитным захватам.
Цель изобретения - расширение эксплуатационньк возможностей путем обеспечения порционности разгрузки груза.
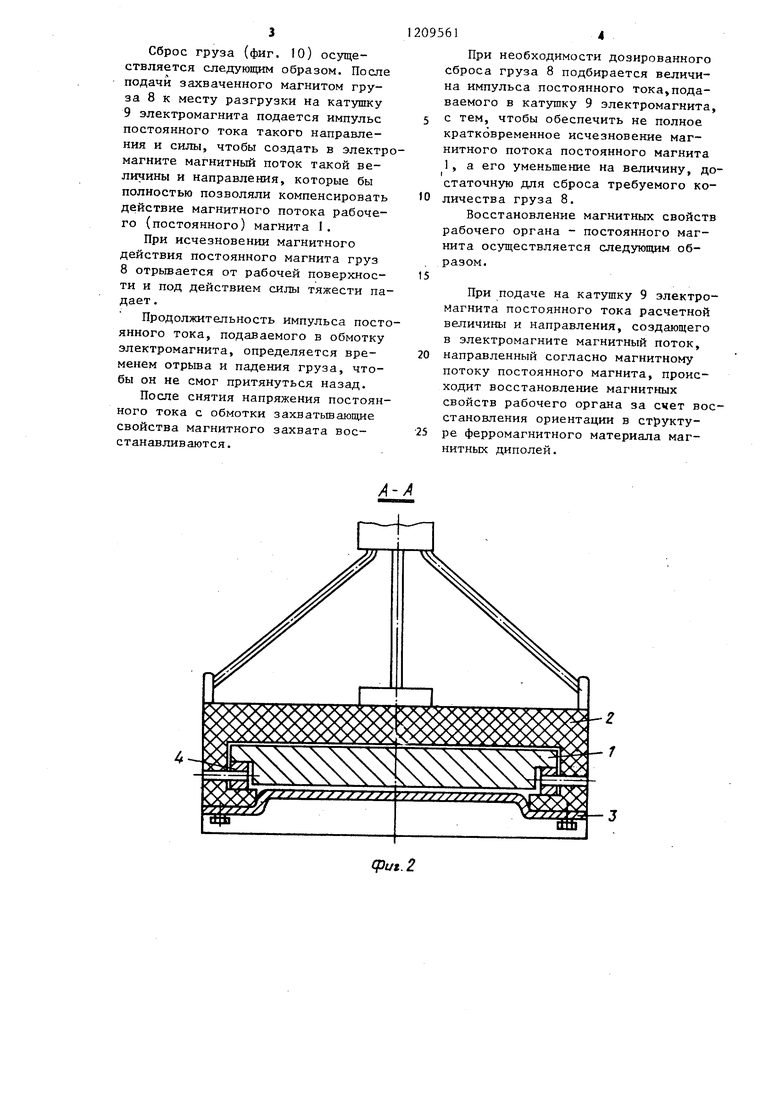
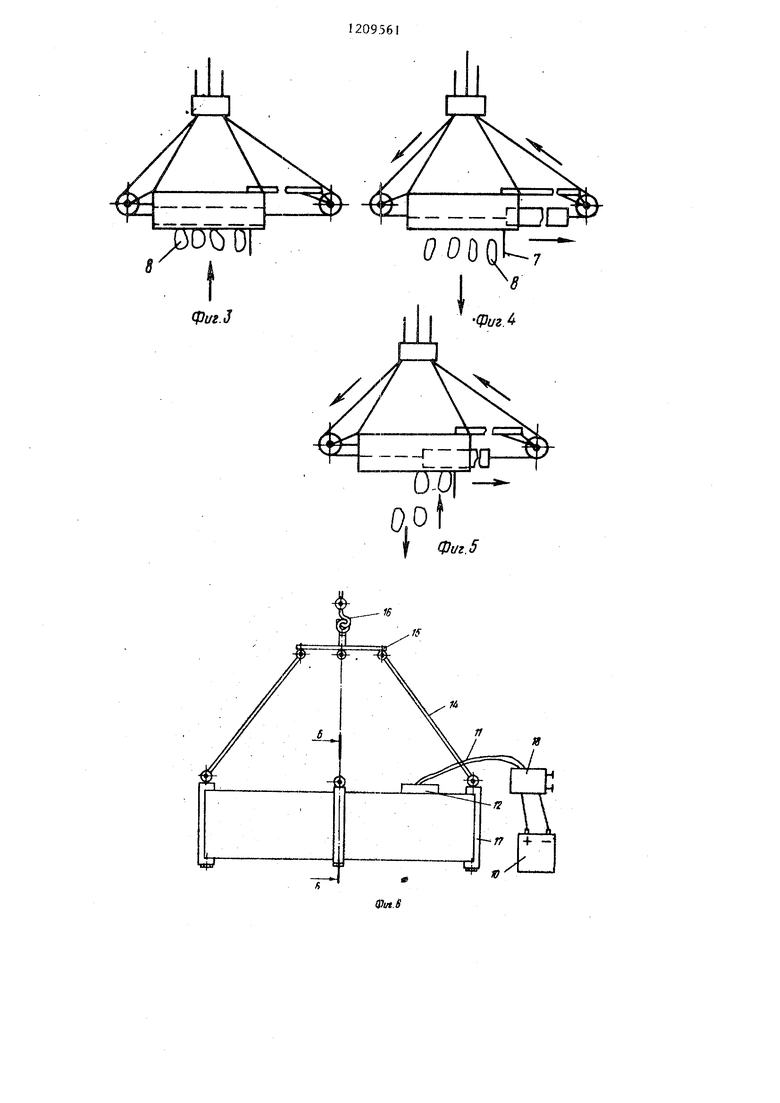
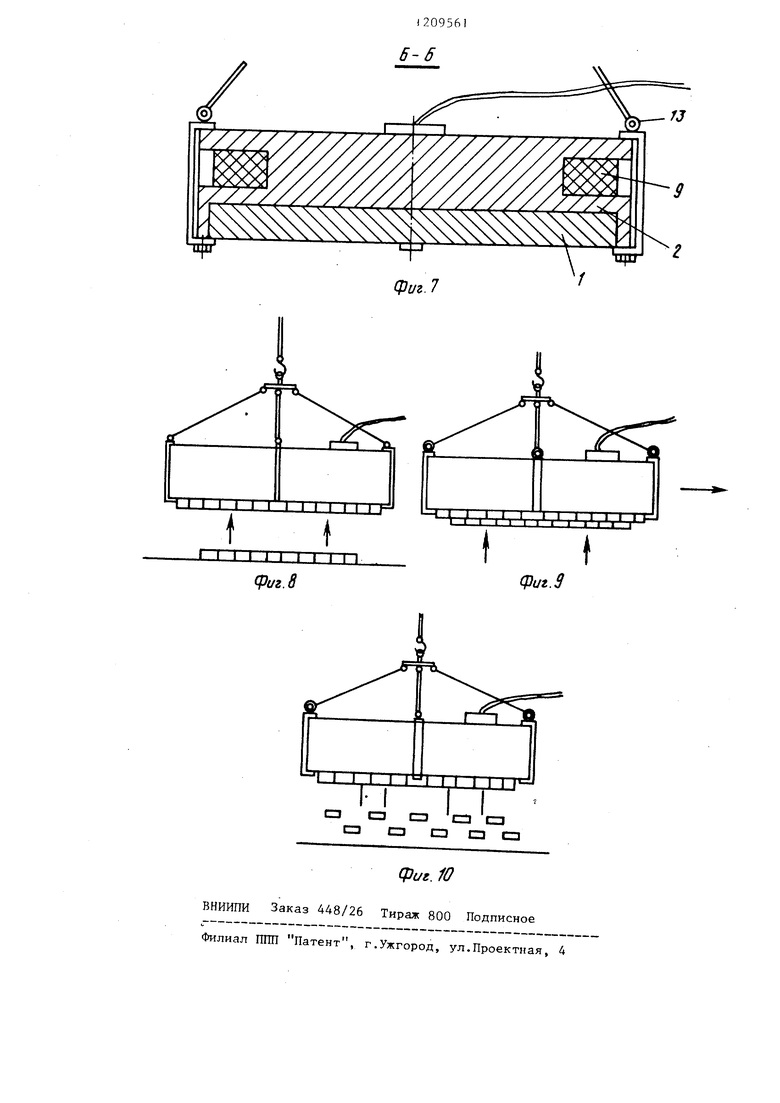
На фиг. 1 показан магнитный захват, вынолненный по первому ва:ри- анту, вид сбоку; на фиг. 2 - разрез А-А на фиг,. I; на фиг. 3 - захват по первому варианту с грузом; на фиг. 4 и 5 - то же, в момент отрыва груза; на фиг. 6 - захват по второму варианту; на фиг. 7 - разрез Б-Б на фиг. 6; на фиг. 8 - захват по второму варианту в момент захвата груза; на фиг. 9 - то лее, с захватным грузом; на фиг. 10 - то же, при отделений груза от захвата.
Магнитный захват по первому варианту содержит постоянный магнит 1, размещенный в корпусе 2. Посшедний охвачен снизу кожухом 3 из немагнитного материала. Магнит 1 установлен на роликах 4 и связан своими концами с тросами 5 и 6 приспособления для навешивания на крюк грузоподъемной машины (не показана).
Корпус 2 и к:ожух 3 связаны жестко между собой, а кожух имеет упор 7, прикрепленный к днишу коясуха 3.
Устройство по первому варианту- работает следующим образом.
Захваченный магнитом груз 8 доставляется на место разгрузки, зате правый трос 6 натягивается и магнит 1 по роликам 4 перемещается вправо. При этом груз (например, металлические ленты) упирается в упор 7 и частично падает вниз. Дальнейшее перемещение приводит к сбросу всего груза. Груз 8 падает строго перпендикулярно вниз, что обеспечивает точную разгрузку.
Затем левый трос 5 натягивается и магнит возвращается в первоначальное положение.
Магнитный захват по вторму варианту содержит постоянный магнит 1, размещенный в корпусе 2. Корпус 2 имеет круговой паз с установленной в нем катушкой (обмоткой) 9 из медного (алюминиевого); привода, подключенной к внешнему источнику 10 постоянного тока с помощью гибкого питающего кабеля 11 через клеммную колодку 12, установленную на корпусе 2.
095.6 I2
На корпусе 2 установлены также петли 13 для присоединения стропов (тросов 14) при помощи круговой траверсы с петлей 15 на крюк 16
с грузоподъемной машины. Дня повьш1е- ния механической прочности захвата его корпус 2 стянут кожухом 17.
Кроме того, в цепи соединения источника 10 постоянного тока с
10 катушкой 9 размещено устройство 18, меняющее величину, полярность и длительность подачи тока.
Следует иметь в виду, что постоянный магнит 1 выполнен из магнито15 твердого материала, обладаюп его
большой коэрцитивной силой, а корпус 2 выполнен в виде сердечника электромагнита и из электротехнической стали, имеющей мягкую коэрцитивную
20 УТаким образом, корпус магнитного
захвата представляет собой постоянный электромагнит. Изменение полярности подаваемого на обмотку элек25 тромагнита напряжения позволяет изменять направление действия магнитного потока, создаваемого электромагнитом, т.е. согласно или встречно действию магнитного потока бочего органа - постоянного магнита 1 .
Изменение величины постоянного тока, подаваемого на обмотку электромагнита, регулирует величину магнитного потока электромагнита, а равно и величину магнитного потока рабочего (постоянного) магнита. Устройство по второму варианту работает следуюш 1М образом.
Процесс захвата груза (фиг. 8) осуществляется путем контакта рабочей поверхности захвата с грузом 8 (в общем случае при отключенном электромагните). При необходимости дозирования захватываемого груза на катушку 9 электромагнита подается устройством 18 постоянный ток такой величины и направления, чтобы уменьшить до требуемого значения величину магнитного потока ра бочего (постоянного)магнита, последний и определяет количество захватываемого груза. Можно и наоборот увеличить количество захватываемого груза.
55
Перенос груза (фиг. 9) осуществляется при отключенном электромаг-. ните.
:J5
40
45
Сброс груза (фиг. 10) осуществляется следующим образом. После подачи захваченного магнитом груза 8 к месту разгрузки на катушку 9 электромагнита подается импульс постоянного тока такого направления и силы, чтобы создать в электромагните магнитный поток такой величины и направления, которые бы полностью позволяли компенсировать действие магнитного потока рабочего (постоянного) магнита I.
При исчезновении магнитного действия постоянного магнита груз 8 отрьшается от рабочей поверхности и под действием силы тяжести падает.
Продолжительность импульса постоянного тока, подаваемого в обмотку электромагнита, определяется временем отрьша и падения груза, чтобы он не смог притянуться назад.
После снятия напряжения постоянного тока с обмотки захватьшающие свойства магнитного захвата восстанавливаются .
2095614
При необходимости дозированного сброса груза 8 подбирается величина импульса постоянного тока,подаваемого в катушку 9 электромагнита,
5 с тем, чтобы обеспечить не полное кратковременное исчезновение магнитного потока постоянного магнита 1, а его уменьшение на величину, достаточную для сброса требуемого ко10 личества груза 8.
Восстановление магнитных свойств рабочего органа - постоянного магнита осуществляется следующим образом.
15
При подаче на катушку 9 электромагнита постоянного тока расчетной величины и направления, создающего в электромагните магнитный поток,
20 направленный согласно магнитному потоку постоянного магнита, происходит восстановление магнитных свойств рабочего органа за счет восстановления ориентации в структу25 ре ферромагнитного материала магнитных диполей.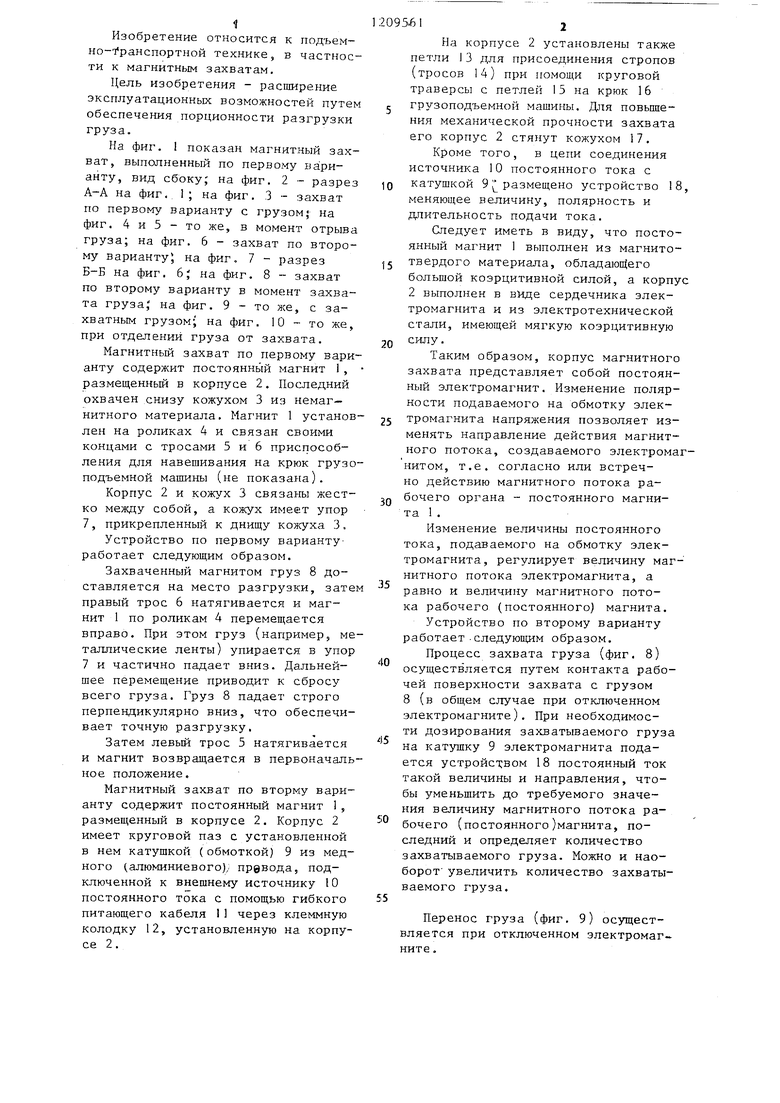
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕВИТИРУЮЩИЙ ПОДВЕС | 2023 |
|
RU2816409C1 |
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ И ПОВОРОТНЫМ УСТРОЙСТВОМ | 2023 |
|
RU2816413C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| ГРУЗОЗАХВАТНЫЙ МАГНИТ | 1995 |
|
RU2111160C1 |
| КРУГЛЫЙ ГРУЗОПОДЪЕМНЫЙ ЭЛЕКТРОМАГНИТ | 2003 |
|
RU2243142C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2786679C2 |
| Грузоподъемный электромагнит | 1987 |
|
SU1449506A1 |
| УСТРОЙСТВО РАЗГРУЗКИ ТРАНСПОРТНЫХ КОЛЕС С ГИБРИДНЫМИ МАГНИТАМИ | 2023 |
|
RU2816415C1 |
1. Магнитный захват, содержащий навешиваемый на грузоподъемную машину корпус, внутри которого размещен постоянный магнит, и кожух, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения порционности разгрузки груза, постоянный магнит размещен подвижно относительно продольной оси корпуса и снабжен элементом для соединения с грузоподъемной машиной, а кожух с корпусом соединены неподвижно. 2. Магнитный захват, содержащий навешиваемый на грузоподъемную машину корпус, внутри которого размещен постоянный магнит, и кожух, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения порционности разгрузки, он снабжен электромагнитом, сердечник которого образует корпус, и блоком изменения величины, полярности и длительности импульсного тока, через который катушка электромагнита подключена к источнику постоянного тока. с (Л ND О СО ел Ф фиг. 1
(Риг.2
8
)OOD
фиг.З
15
Я
фиг.7
(риг. 8
II г . 1
и I
сз сз сэ сп сз сэ а пз СП
(puf.fO
ВНИИПИ Заказ 448/26 Тираж 800 Подписное Филиал ГОШ Патент, г.Ужгород, ул.Проектная,
| Магнитный захват | 1980 |
|
SU922023A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
