9иг.1
образом, что внешняя поверхность магнито- провода плотно огибает поверхность изделия. Затем включением контакта 11 на зажимы обмотки 1 подается переменное напряжение. Ферромагнитные гибкие захваты
Изобретение относится к устройствам для захвата перемещения грузов и может б1.1ть использовано в ряде отраслей промышЛ(ННОСТИ.
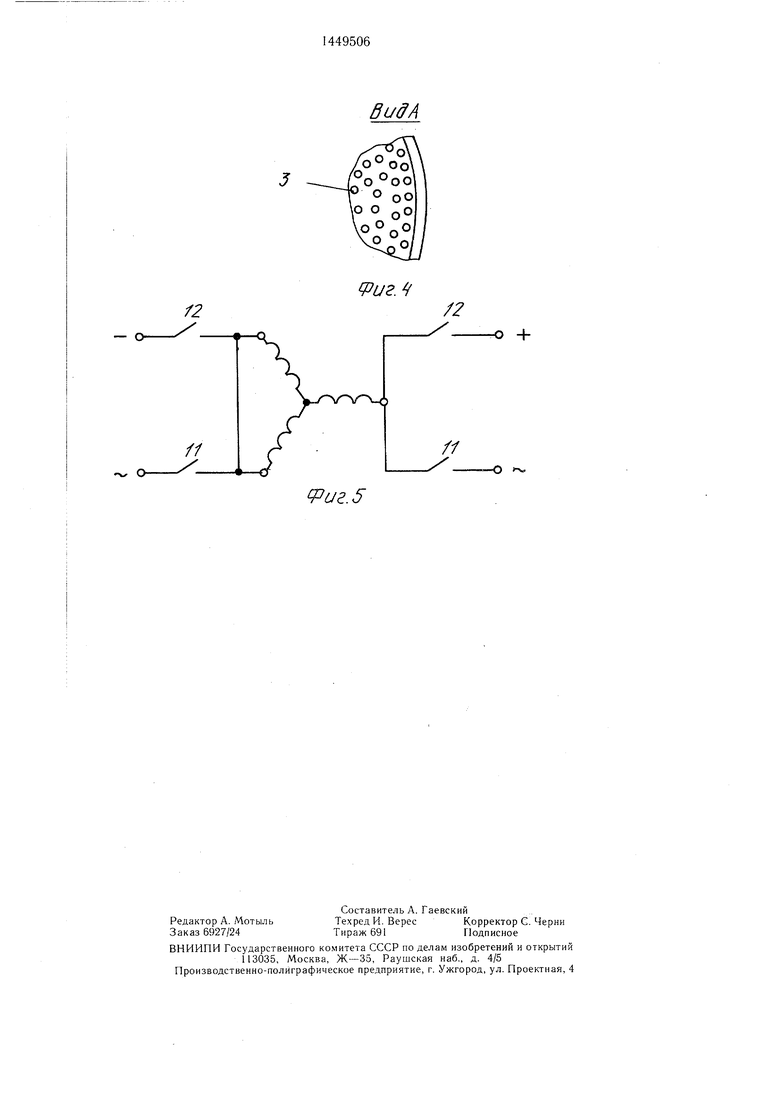
Цель изобретения - повышение эксплуатационных качеств путем обеспечения 5 3, преодолевая незначительное сопротивле- з хвата пористых немагнитных материалов. ние упругого материала 4, колеблясь, про; На фиг. 1 изображен грузоподъемныйникают в- пористую поверхность перегруэ/|ектромагнит в исходном положении, об- ш|ий вид; на фиг. 2 - то же, в рабочем п(|)ложении; на фиг. 3 - узел I на фиг. 2; Ю ния контактов 12 на обмотки подается нг фиг. 4 - вид А на фиг. 1; на фиг. 5 - напряжение постоянного тока. Ферромагнит- с;|ема управления электромагнитом.
Грузоподъемный электромагнит сожаемого изделия.
После отключения контактов 11 и включеные гибкие захваты 3, принадлежащие к разноименным магнитным полюсам магнито- провода, притягиваются друг к другу, захватывая выпуклые-части пористой поверхд
Ч(
сг и;
ржит три свернутые спиралью и электри- ски соединенные между собой в центре
ные гибкие захваты 3, принадлежащие к разноименным магнитным полюсам магнито- провода, притягиваются друг к другу, захватывая выпуклые-части пористой поверхирали из тонкопроводящего материала, ности перегружаемого изделия. Ферромаг.олированные от магнитопровода, собраннитный порошок 10 под воздействием магнитнАго из трех свернутых спиралью стальных ного поля затвердевает и при помощи вы- л1нт 2 с ферромагнитными гибкими захва- ступов 6 фиксирует гибкую мембрану 5 вмес- т4ми 3, разделенными немагнитным упругим те со всем магнитопроводом в-определенном материалом 4. Стальные ленты 2 с обмот- 20 положении. Грузоподъемный электромагнит кфми 1 соединены с гибкой мембраной 5,готов к подъему. Разгрузка происходит
С11 абженной выступами 6 в виде концент- р|1ческих окружностей.
I В верхней части корпуса 7 расположены с|льфон 8 и шток-подвес 9. В герметическую полость, образуемую гибкой мембраной 25 5 сильфоном 8 и корпусом 7, засыпан ферров обратной последовательности. Формула изобретения
Грузоподъемный электромагнит, содержащий элемент для соединения с крюмЬгнитный порошок 10. Два свободныхком крана, корпус с полостью, в нижней
кЬнца обмотки закорачиваются и соединя-части которой установлена трехленточная
1сГгся с одной клеммой источника питанияспиральная обмотка, подключенная по схеме
(йе показан), а оставщийся конец соеди-«звезда к сети переменного тока, и раснйется с другой клеммой источника посто- ° положенный между ветвями обмотки леняИного или переменного тока. Подключениеточный магнитопровод, отличающийся тем,
обмоток на переменный ток производитсячто, с целью повышения эксплуатационных
контактами 11, на постоянный ток-кон-качеств путем обеспечения захвата порист ктами 12.тых немагнитных материалов, он снабжен
Грузоподъемный электромагнит работаетгибкими ферромагнитными заостренными
„д-J- ртромгнями чякпрп прннкг ли ня нижних тппс|1едующим образом.
стержнями, закрепленными на нижних торцах лент магнитопровода и разделенными между собой упругой прокладкой, гибкой мембраной, закрепленной на верхних торцах обмотки и магнитопровода и имеющей
стержнями, закрепленными на нижних торцах лент магнитопровода и разделенными между собой упругой прокладкой, гибкой мембраной, закрепленной на верхних торцах обмотки и магнитопровода и имеющей
I В исходном положении спирали обмотки и стальные ленты 2 магнитопровода не дополнительных смещений в вертикальном направлении за счет некоторой40 направленные вверх концентрические вы- жесткости мембраны 5.ступы, и сильфоном, размещенным в верх- При опускании грузоподъемного элек-ней части корпуса, верхняя часть полости тромагнита на поверхность перегружаемогокоторого под мембраной заполнена ферро- изделия шток 9 движется вниз относи-магнитным порошком, при этом элемент тельно корпуса 7 и сдавливает сильфон 8.для соединения с крюком крана представ- Под действием давления гибкая мембрана ляет собой шток, размещенный над сильфо- 5 вместе с обмоткой 1 и стальными лен-ном, а обмотка дополнительно соединена тами 2 магнитопровода изгибается такимс источником постоянного тока.
образом, что внешняя поверхность магнито- провода плотно огибает поверхность изделия. Затем включением контакта 11 на зажимы обмотки 1 подается переменное напряжение. Ферромагнитные гибкие захваты
3, преодолевая незначительное сопротивле- ние упругого материала 4, колеблясь, проникают в- пористую поверхность перегруния контактов 12 на обмотки подается напряжение постоянного тока. Ферромагнит-
жаемого изделия.
После отключения контактов 11 и включения контактов 12 на обмотки подается напряжение постоянного тока. Ферромагнит-
ные гибкие захваты 3, принадлежащие к разноименным магнитным полюсам магнито- провода, притягиваются друг к другу, захватывая выпуклые-части пористой поверхности перегружаемого изделия. Ферромагного поля затвердевает и при по ступов 6 фиксирует гибкую мембра те со всем магнитопроводом в-опр положении. Грузоподъемный элек готов к подъему. Разгрузка п
в обратной последовательности. Формула изобретения
гибкими ферромагнитными заостренными
ртромгнями чякпрп прннкг ли ня нижних тппстержнями, закрепленными на нижних торцах лент магнитопровода и разделенными между собой упругой прокладкой, гибкой мембраной, закрепленной на верхних торцах обмотки и магнитопровода и имеющей
направленные вверх концентрические вы- ступы, и сильфоном, размещенным в верх- ней части корпуса, верхняя часть полости которого под мембраной заполнена ферро- магнитным порошком, при этом элемент для соединения с крюком крана представ- ляет собой шток, размещенный над сильфо- ном, а обмотка дополнительно соединена с источником постоянного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемный электромагнит | 1979 |
|
SU814839A1 |
| Магнитный ловитель | 1982 |
|
SU1035191A1 |
| Устройство для закрепления ферромагнитных деталей | 1989 |
|
SU1713773A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136294A1 |
| Устройство для подачи листов из стопы и его вакуумный захват | 1989 |
|
SU1712285A1 |
| Грузоподъемный электромагнит для ферромагнитных грузов | 1987 |
|
SU1532502A1 |
| Мотор-колесо для самолета | 2018 |
|
RU2703704C1 |
| Устройство для захвата и перемещения ферромагнитных материалов | 1982 |
|
SU1066779A1 |
| Захватное устройство для мягких деталей | 1990 |
|
SU1811482A3 |
| Устройство для транспортирования и накопления ферромагнитных деталей | 1986 |
|
SU1313630A1 |
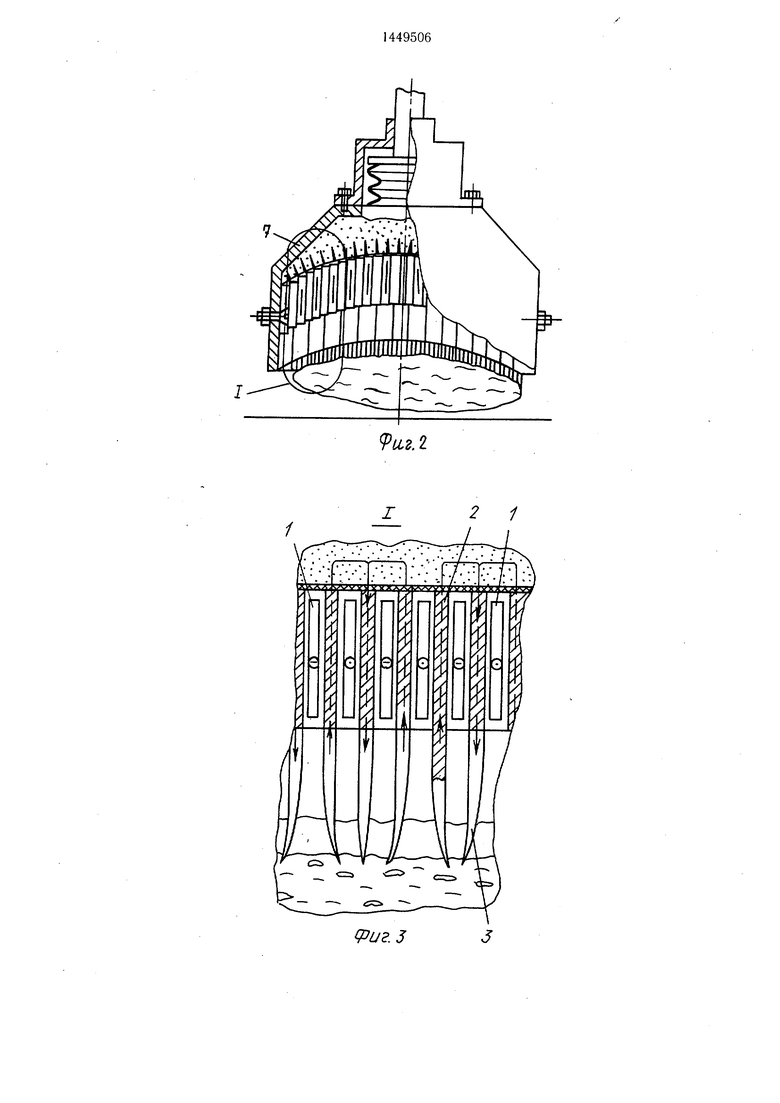
Изобретение относится к устройствам для перемещения грузов и может быть использовано в ряде отраслей промышленности. Цель изобретения - расширение функциональных возможностей устройства. Электромагнит содержит три свернутые спиралью и элактрически соединенные между собой в центре корпуса 7 обмотки 1, изолированные от .магнитопровода, собранного из трех стальных лент с ферромагнитными гибкими захватами 3, разделенными немагнитным упругим материалом 4. Стальные ленты 2 с обмотками 1 соединены с гибкой мембраной 5, снабженной выступами 6 в виде концентрических окружностей. В верхней части корпуса 7 расположены силь- фон 8 и шток-подвес 9. В repMetn4ecKyro полость, образуемую гибкой мембраной 5, сильфоном 8 и корпусом 7, засыпан ферромагнитный порошок 10. 5 ил.
9иг.1
fpu.3
J
иг.
Уиг.
| Грузоподъемный электромагнит | 1973 |
|
SU493109A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
