зону, количество зон определяют из соотношения
;N IIWT(-),
где N - число зон коррекции-в плос.кости коррекции; Я радиус рабочей зоны,; f - минимальное расстояние между соседними-зонами , INT - целая часть числа, дисбаланс ротора в плоскости коррекции раскладывают на две составляю- пще: меньшую по величине - дополнительную DAOH, расположенную в одной из зон в диапазоне ,
i йН т- относительно тяжелого
места ротора, при условии ,
где ДЧ - угол между двумя соседними зонами;
Рдоп - дисбаланс в зоне, расположенной под углом Aon tiAf относительно тяжелого места ротора; о - максимально удаляемый за импульс дисбги1анс5 номер зоны относительно тяжелого места,
1
Изобретение относится к технологии приборо- и машигностроения и может быть использовано для балансировки малогабаритных роторов лучом лазера.
Известен способ балансировки роторов лучом лазера, заключающийся в том, что дисбаланс корректируют кратковременным периодическим, воз-действием лазерного луча высокой интенсивности. Коррекцию дисбаланса осуществляют из тяжелого места ротора в плоскости коррекции til,
Недостатком данного способа является невысокое качество поверхности следа при многократном удалении неуравновешенной массы из одной зоны на поверхности ротора, что вызвано неравномерностью плотности энергии лазерного луча при етзедении
0078
и большую основную составляющую . расположенную в одной из ближайших зон относительно тяжелого места ротора, относительно которой затем осуществляют коррекцию дисбаланса, пропуская зону, расположенную симметрично зоне дополнительной составляющей дисбаланса относительно основной составляющей дисбаланса, а дополнительную составляю- итую корректируют вместе с основной DOCK, ,
2,Способ ПОП.1, отличающийся -тем, что, с целью повьпяе- ния производительности балансировки, корректируют основную составляющую дисбаланса в зоне ее приведения
на величину De.
3.Способ по пп. 1 и 2, отличающийся тем, что выделяют на роторе в одной плоскости коррек.ции две или более группы зон, смещенных относительно нулевой группы на угол ДМ к- KuM j,
где К- номер группы зон ( 0,1, 2,,.,,и), в которых затем производят цикл балансировки
А Уд - угол между двумя соседними группами зон.
2
его в зону повторной коррекиди дисбаланса в условиях малой угловой погрешности. След от таких повторных взаимодействий становится размытым с большой долей облоя на поверхности.
Наиболее близким по технической сущности к изобретению является способ балансировки роторов, заключающийся в том, что устраняют дисбаланс ротора в группе, зон, расположенных в плоскости коррекции, кратковременным периодическим воздейст- вием на его поверхность лазерного
луча высокой интенсивности, который перемещают поступательно и симметрично относительно тяжелого места ротора.
В результате такого воздействия
образуется несколько корректирующих
31
отверстий5 распопоженных одно около другого в направлении периферии в плоскости коррек1.щи, сиьметрично относителНьно точного углового положения дисбаланса ротора 2 ,
. Однако из-за пог решности энергии и момента инициирования лазерного луча в процессе коррекции дисбаланса в ряде .случаев необходима повторная балансировка из зоны как тяжелого места ротора, так и с новым значением угла дисбаланса. При этом возможно повторное поражение зон с уже корректированной массой, что снижает точность и прризводи- тельность балансировки из-за образования облоя на поверхности ротора.
Цель изобретения - повьшение точности и -производительности балансировки.
Поставленная цель достигается тем, что при способе балансировки роторов, закгаочающемся в том, что устраняют дисбалтанс ротора в группе зон, расположенных в плоскости коррекции, кратковременным периодическим воздействием на его поверхность лазерного луча высокой интенсивности, который перемещают поступательно и си метрично относительно тяжелого места ротора, дисбаланс ротора переносят в группу зон, син фазированных с отметкой на роторе, которую принимают за нулевую зону, количество зон определтот из соотношения
М--г1МТ -|где N - число зон коррекции в
плоскости коррекции R. радиус рабочей зоны,° Р- - минимальное расстояние меиоду соседними зонами; INT - целая часть числа, дисбаланс ротора в плоскости коррекции раскладьшают на две составляю- меньш по по величине - дополнительную DAOH, расположенную в одной из зон в диапазоне
относительно тяжелого 4
места ротора, при условии Т Т)
,on
u f - угол между двумя соседними 30намиj
дисбаланс в зоне, распо- ложенной под углом
РА, относительно тяжелого места ротора.
JR ,
т;-
15
20
210078
Т) максимально удаляемый за импульс дисбапанс; I - номер зоны относительно
тяжелого места,
и большую -- основную составляющую РОСН , расттоложеннуто в одной из ближайших зон относительно тяжелого места ротора, относительно которой затем осуществляют коррек- - цию дисбаланса, пропуская зону, расположенную симметрично зоне дополнительной составляющей дисбаланса относительно основной составляющей дисбаланса, а дополнительн1 тс1 составляющую Сдол корректируют вместе
с основной DOCH.
При корректируют основную составляющ по дисба.чанса в зоне ее приведения на велр-;чнну Во
Кроме того, выделяют на роторе в одной плоскости коррекции две или более группы зон, смещенных относительно нулевой группы на угол
где к - номер группы зон (К
О, 1, 2,,.,,v-i), в которых затем производят цикл балансировки;
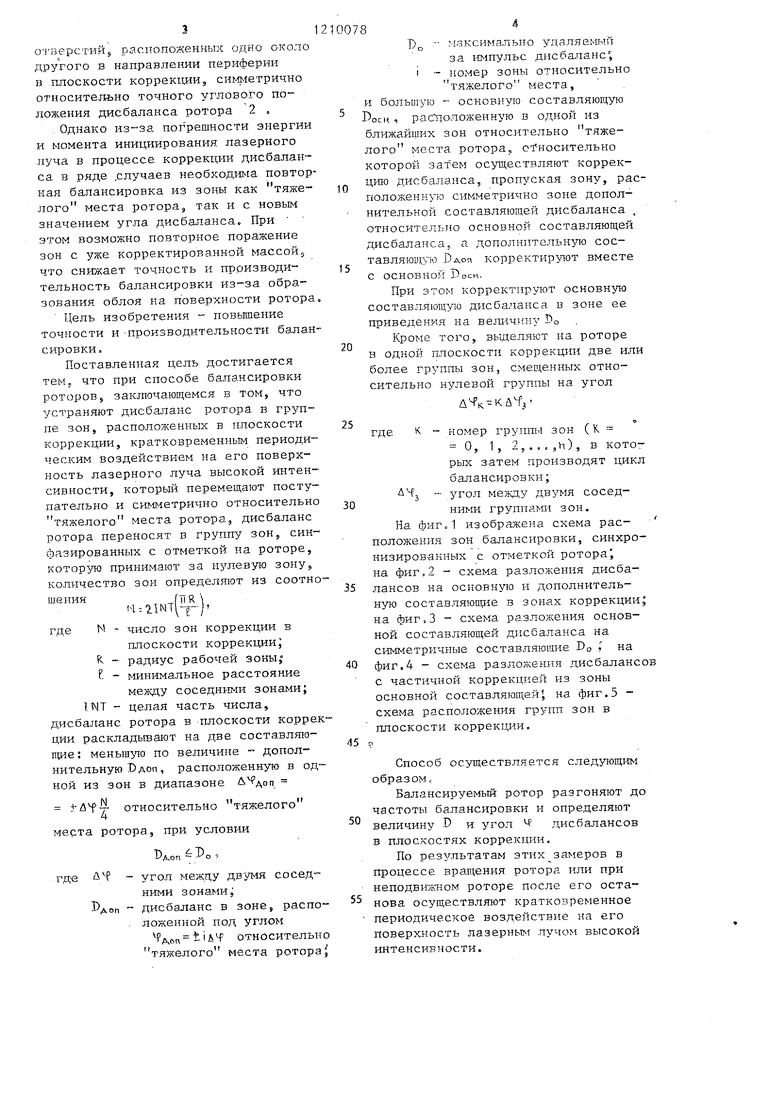
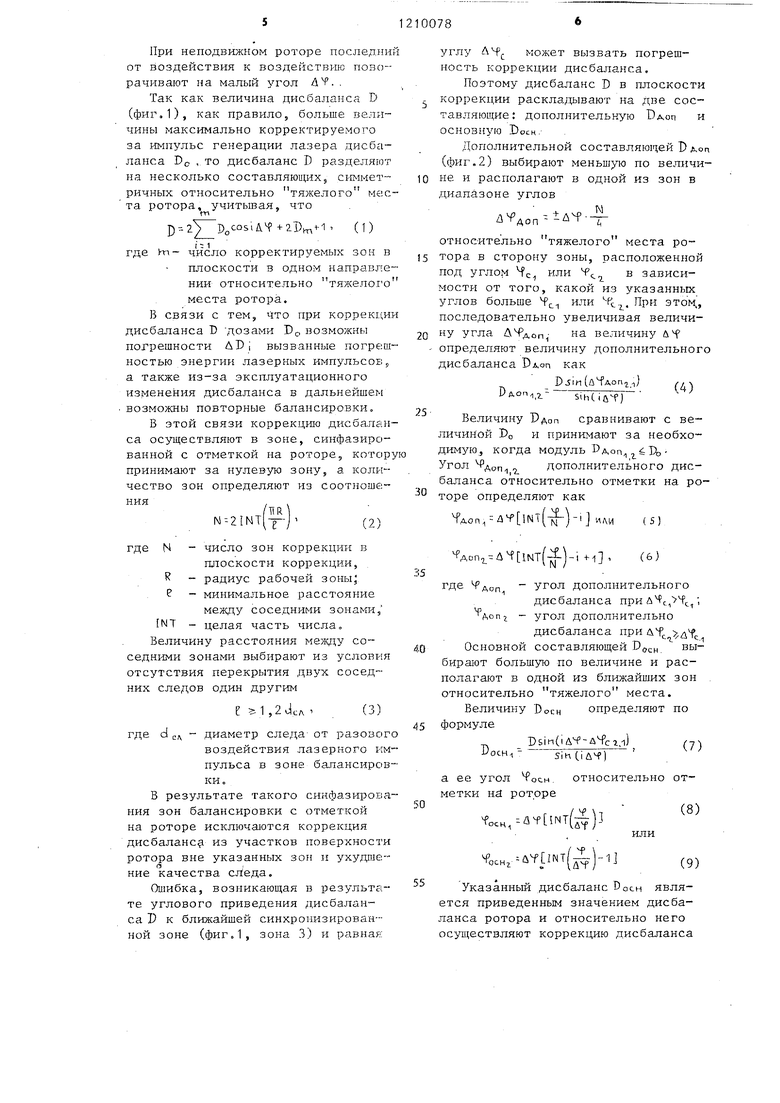
AM j - угол между двумя соседними группами зон. На фигс1 изображена схема рас- положения зон балансировки, синхронизированных с отметкой ротора , на - схема разложения дисба- 35 ла.нсов на основную и дополнительную составляющее в зонах коррекции; на - схема разложения основной составляющей дисбаланса на симметричные составляющие DO , на 40 фиг,4 - схема разложения дисбалансов с частичной коррекцией из зоны основной составляуощей , на фиг.5 - схема распололсения групп зон в плоскости коррекции, 45
Способ осуществляется следующим образом,
Балансируемый ротор разгоняют до частоты балансировки и определяют величину D и угол 4 дисбалансов в плоскостях коррекции.
По результатам этих замеров в процессе вpa, ротора или при неподвижном роторе после его оста- нова осуществляют кратковременное периодическое воздействие на его поверхность лaзepны лучом высокой интенсивности.
При неподвижном роторе последний от воздействия к воздействию поворачивают на малый угол AY..
Так как величина дисбаланса D (фиг,1), как правило, больше величины максимально корректируемого за импульс генерации лазера дисбаланса DO , то дисбаланс I) разделяют на несколько составляющих; симметричных относительно тяжелого м€;с та ротора, учитьшая, что
)--2 D cosiAH +Zi)
Игл
1
где hi- число корректирз/емых зон в плоскости в одном направлении относительно тяжелог о места ротора.
В связи с тем, что при коррекции дисбаланса D дозами DO BOSMO/KHES погрешности ДР i вызванные norpetit- ностью энергии лазерных импульсов,, а также из-за эксплуатационного изменения дисбаланса в дальнейо1ем возможны повторные балансировки,
В этой связи коррекцию дисбаланса осуществляют в зоне, синфазиро- ванпой с отметкой па роторе, котору принимают за нулевую зону, а количество зон определяют из соотношения. . /TIR N--2lNT Y-j (2)
где N - число зон коррекции в
плоскости коррекции, - радиус рабочей зоны; Р - минимальное расстояние
между соседними зонами, NT - целая часть числа„ Величину расстояния между соседними зонами выбирают из условия отсутствия перекрытия двух соседних следов один другим
Е 1 ,2 сл
где d (. диаметр следа от разового воздействия лазерного импульса в зоне балансировки о
В результате такого синфазирова- ния зон балансировки с отметкой на роторе исключаются коррекция дисбалансу из участков поверхности
ротора вне указанных зон н ухудпле-d I ние качества сЛеда.
Ошибка, возникающая в результате углового приведения д,исбалан- са D к ближайшей синхронизированной зоне (фиго1, зона 3) и равная
углу может вызвать погрешность коррекции дисбаланса.
Поэтому дисбаланс D в плоскости коррекции раскладывают на две составляющие: дополнительную ВАОП и
основную ТЗоснДополнительной составляющей Dдоп (фиг,2) выбирают меньшую по велнчи- 10 не и располагают в одной из зон в диапазоне углов
М
йЧ
доп
- tAM относительно тяжелого места ро- тора в сторону зоны, расположенной под углом Чс или Y в зависимости от того, какой из указанных углов больше Й или -Р. При этом., последовательно увеличивая величи- У угла ,- на величину определяют величину дополнительного дисбаланса Рлоп как
D ли (дЧ доп) /,ч
D доп,,SihCiu f)
Величину Рдоп сравнивают с величиной DO и принимают за необходимую когда модуль Рдоп ТЬ- Угол доп, дополнительного дисбаланса относительно отметки на роторе Определяют как
M дon, ()- ;,ли
(5;
35
fl.on
(-)-,,1,
(6)
50
где Ч доп - угол дополнительного
дисбаланса при дМ ;., тдоп - угол дополнительно
дисбаланса при . у,
40 Основной составляющей DOJ-M. выбирают большую по величине и располагают в одной из ближайших зон относительно тяжелого места.
Величину Восн определяют по 45 формуле
(iA f-a4 c2,i) (7) DOW, - - slhtiAM)
а ее угол М оен, относительно отметки па роторе
(8)
ocH,()
или
%CH,(
(9)
Указанный дисбаланс DOCH является приведенным значением дисбаланса ротора и относительно него осуществляют коррекцию дисбаланса
7
дозами fo (фиг.З), рассчитывая их с учетом уравнения (1), пропуская зону, расположенную симметрично относительно основной составляющей DOCH дисбаланса в зоне дополнительной составляющей . дисбаланса, которую корректируют вместе с основной составляющей DOCH
Основную составляющую DOC.H частично корректируют из зоны ее приведения на величину Do (Лиг. 4).
Если осуществляют многоэтапную балансировку, то зоны формируют в группы, одноименные зоны которых смещены относительно нулевой зоны на угол
u4, , (10)
2100788 .
а соседние зоны в каждой группе - на угол - ,
--Ий
Коррекцию дисбалансов .осущест- 5 влягат предлагаемым способном последовательно из 0,1,...,V групп зон.
В связи с тем, что дисбаланс кбрректируют из зон, синфазирован- ных с отметкой на роторе, расклады,0 вают дисбаланс на две составляющие основную DOCM и дополнительную 1)доп в указанных зонах, частично корректируют основную составляющую в зоне ее расположения, а также ис( пользуют несколько групп зон существенно возрастает точность и производительность балансировки роторов лучом лазера, ,
ffOftt.
оп Л
s
оси
Фиг.
оси
фуг. 4
Редактор О. Юрковецкая
512/52
Тираж 778 Подписное ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г, Ужгород, ул. Проектная,4
Фиг. 5
Составитель А. Босой
Техред А,Бойко Корректор В. Бутяга

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| Способ балансировки лучом лазера | 1990 |
|
SU1772637A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| Устройство для динамической балансировки лучом лазера роторов | 1983 |
|
SU1130753A2 |
| Способ автоматической балансировки роторов и устройство для его осуществления | 1982 |
|
SU1096512A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1988 |
|
SU1649275A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 1973 |
|
SU404286A1 |
| Устройство для балансировки роторов | 1990 |
|
SU1791739A1 |

| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Суминов В.Н., Баранов П.Н | |||
| Автоматизация процесса балансировки вращающимся лучом лазера | |||
| - Механизация и автоматизация производства, 1978, N 5 | |||
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 0 |
|
SU404286A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
