Изобретение относится к балансироночной технике и может быть использовано для балансировки гироскопов, в частности динамически настраваемых гироскопов.
Известно устройство для автоматической балансировки роторов гироскопов в вакууме, содержащее основание закрепленный на нем вибровозбудител с вибростолом и корректирующий лазе с фокусирующим объективом, приспособление для крепления гироскопа и вакуумный колпак, установленные на вибростоле, подвижные фиксаторы, установленные на основании и взаимодействующие с вибростолом, систему защиты оптики, выполненную в виде . сопла, и систему управления, связанную с корректирующим лазером и вибратором CljНедостатком устройства является участие оператора в цикле определения параметров дисбаланса, настройке лазера относительно гироскопа, что делает процесс балансировки за.висящим от навыков оператора, вносит субъективные погрешности.и снижает точность и производительность балансировки.
Наряду с этим возможно повторное поражение лазерным лучом одной и то же зоны на поверхности ротора гироскопа, что ухудшает качество следа и снижает надежность балансировки.
Наиболее близким по технической сущности к изобретению является устройство для автоматической балансировки роторов гироскопов, содержащее основание, закрепленный на нем вибровозбудитель с вибростолом, выполненным в виде плиты, имеющей возможность перемещаться в вертикальном направлении, установленйые на столе корректирующий лазер с фокусирующим объективом, приспособление для крепления гироскопа, выполненное в виде пластины, имеющей возможность вращения вокруг трех взаимно перпендикулярных осей, причем одна из осей вращения перпендикулярна плоскости пластины, и вакуумный колпак, подпружиненные в осевом направлении фиксаторы, установленные на основании и взаимодействующие с вибростолом, систему защиты, выполненную в виде последовательно соединенных пневмомагистрали, электропневмоклапана, сопла и блока отсоса и систему управления, включающую последо вательно соединеннь1е датчик опорного сигнала, формирователь и фазовращатель, связанный с вибровозбудителем, два канала электрической пружины, каждый из которых содержит последовательно соединенные датчик угла, усилитель-демодулятор и датчик момента, блок тестконтроля, входы которого соединены с датчиком угла
первого канала электрической пружины и выходом фазовращателя, блок питания, подключаемый к гироскопу, управлякяцую ЭВМ, входы которой соединены с выходами блока тестконтроля и усилителей-демодуляторов, и блок управления f выход которого соединен с входом корректирующего лазера 2.
Недостатком известного устройства является снижение производительности балансировки, вызванное необходимостью ручных операций смены положения оси гироскопа при определении параметров дисбалансов и их коррекции .
Целью изобретения является повышение производительности балансировки.
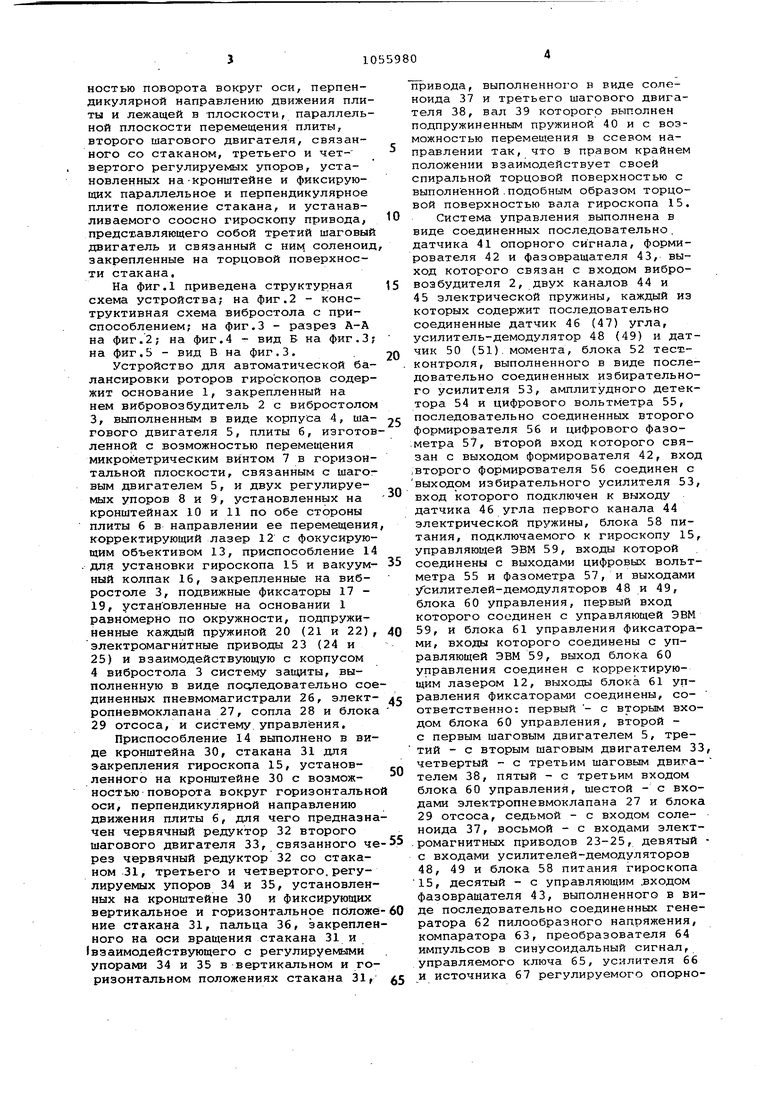
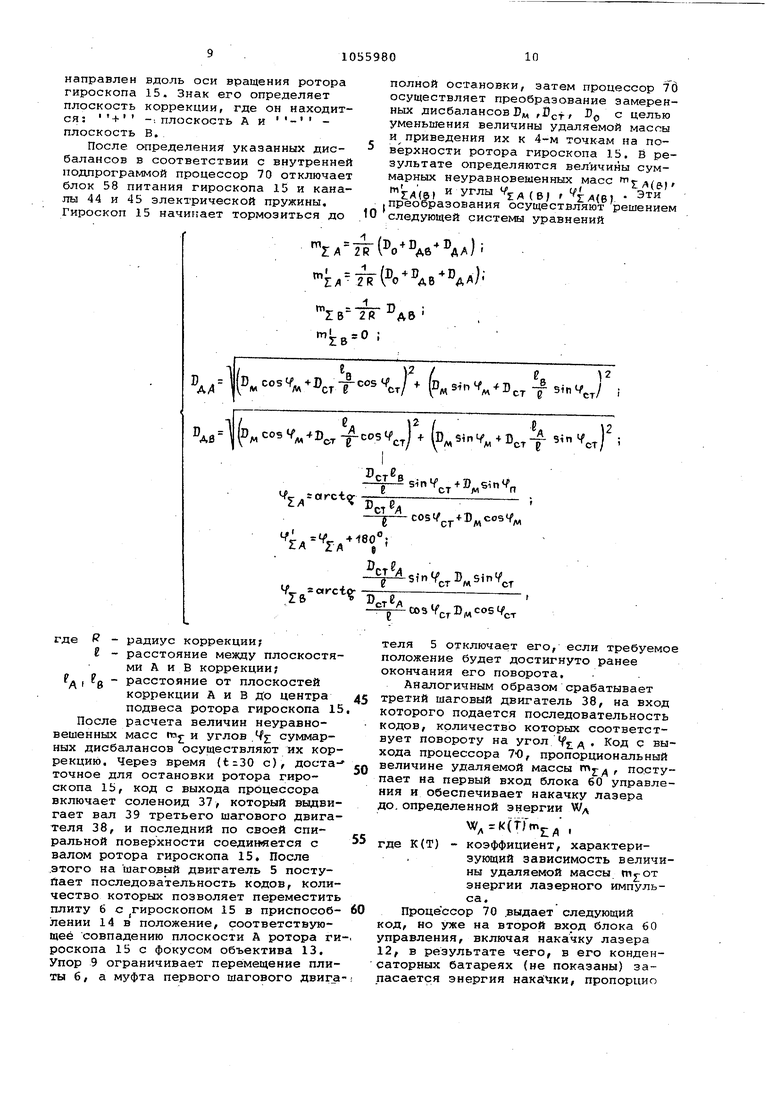
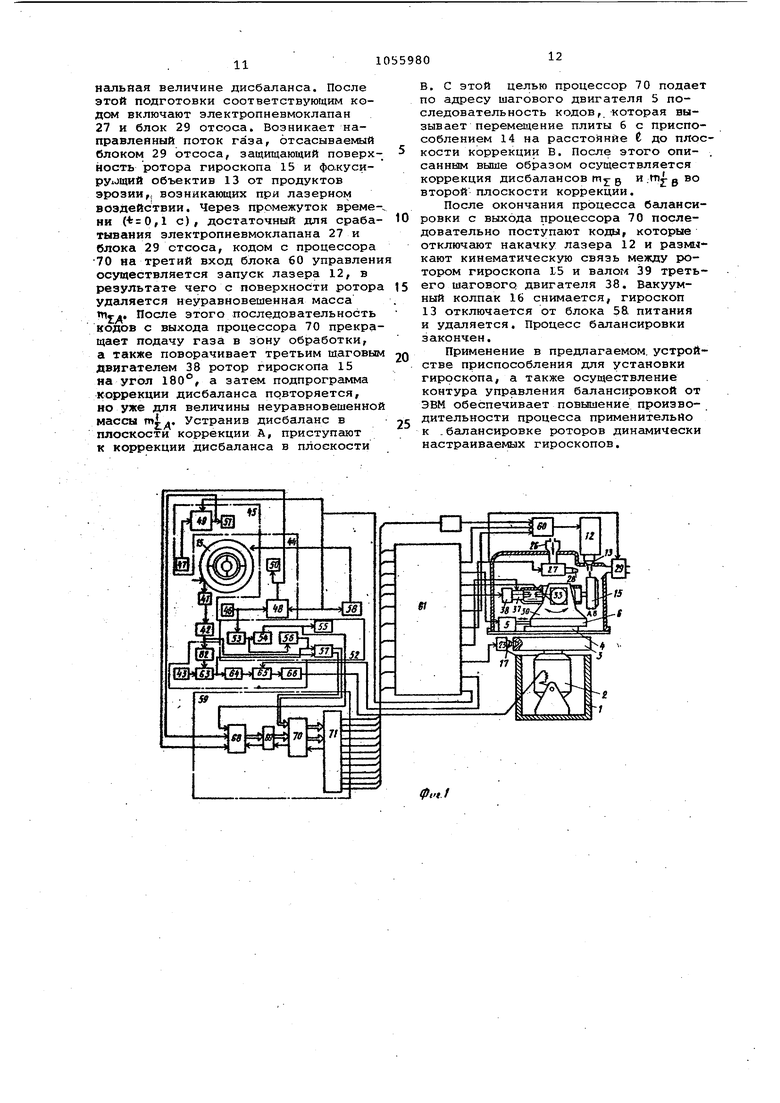
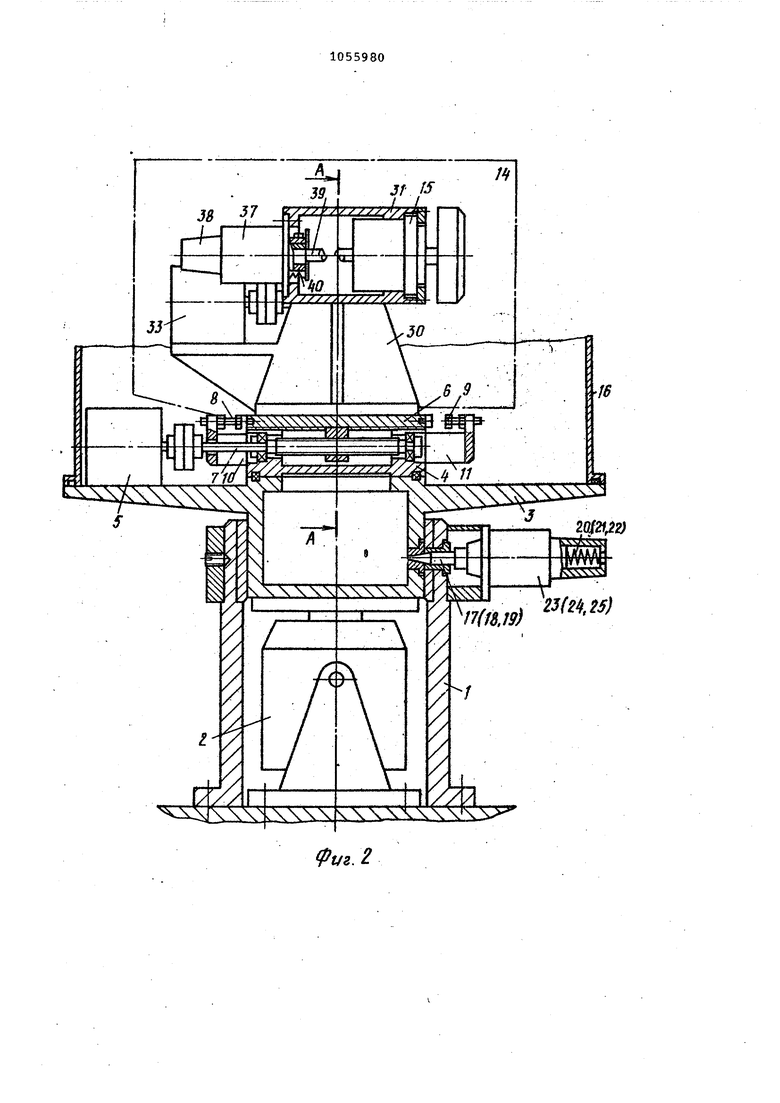
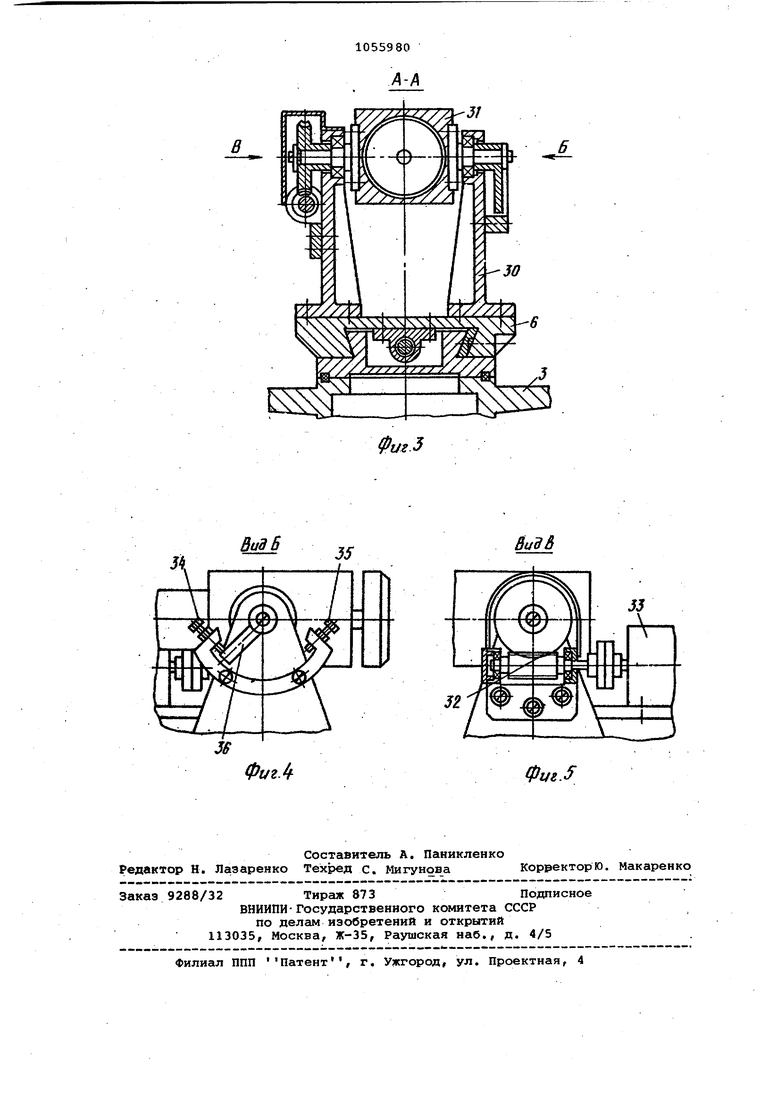
Поставленная цель достигается тем, что устройство для автоматической балансировки роторов гироскопов, содержащее основание, закрепленный на нем вибровозбудитель с вибростолом, установленные на нем корректирующий лазер с фокусирующим объективом, приспособление для крепления гироскопа и вакуумный колпак, подпружиненные в осевом направлении фиксаторы, усхановленные на основании и взаимодействующие с вибростолом, систему защиты, выполненную в виде последовательно соединенных пневмомагистрали, электропневмоклапана, сопла и блока отсоса, и систему управления, включающую последовательно соединенные датчик опорного сигнала, формирователь и фазовращатель, соединенный с вибровозбудитёлем, два канала электрической пружины, каждый из которых содержит последовательно соединенные датчик угла, усилительдемодулятор и датчик момента, блок тестконтроля, входы которого соединены с датчиком угла первого канала электрической пружины и выходом фазовращателя, блок питания,-ПОДКЛЮ-чаемый к гироскопу, управляющую ЭВМ, входы котЪрой соединены с выходами блока тестконтроля и усилителей-демодуляторов, и блок управления, выход которого соединен с входом корректирующего лазера, снабжено электромагнитными приводами, связанными с фиксаторами, и блоком управления фиксаторами, соединенным с выходами управляю1дей ЭВМ, вибростол выполнен в виде корпуса, установленного на нем первого шагового двигателя, плиты, установленной с возможностью перемещения параллельно поверхности вибростола и связанной с первым ша|говым двигателем, и двух регулируемых упоров, предназначенных для ограничения перемещений плиты, приспособление для крепления гироскопа выполнено в виде иронштейна, стакана для закрепления гироскопа, установленного на кронштейне с возможностью поворота вокруг оси, перпендикулярной направлению движения плиты и лежащей в -плоскости, параллельной плоскости перемещения плиты, второго шагового двигателя, связанного со стаканом, третьего и четвертого регулируемых упоров, установленных на-кронштейне и фиксирующих параллельное и перпендикулярное плите положение стакана, и устанавливаемого соосно гироскопу привода, представляющего собой третий шаговый двигатель и связанный с ним. соленоид закрепленные на торцовой поверхности стакана. На фиг.1 приведена структурная схема устройства; на фиг.2 - конструктивная схема вибростола с приспособлением; на фиг.3 - разрез А-А на фиг.2; на фиг.4 - вид Б на фиг.З; на фиг.5 - вид В на фиг.З, . Устройство для автоматической балансировки роторов гироскопов содержит основание 1, закрепленный на нем вибровозбудитель 2 с вибростолом 3, выполненным в виде корпуса 4, шагового двигателя 5, плиты б, изготов ленной с возможностью перемещения микрометрическим винтом 7 в горизонтальной плоскости, связанным с шаговым двигателем 5, и двух регулируемых упоров 8 и 9, установленных на кронштейнах 10 и 11 по обе стороны плиты 6 в направлении ее перемещения корректирующий лазер 12с фокусирующим объективом 13, приспособление 14 . для установки гироскопа 15 и вакуумный колпак 16, закрепленные на вибростоле 3, подвижные фиксаторы 17 19, установленные на основании 1 равномерно по окружности, подпружиненные каждый пружиной 20 (21 и 22), электромагнитные приводы 23 (24 и 25) и взаимодействующую с корпусом 4 вибростола 3 систему зашиты, выполненную в виде посутедовательно сое диненных пневмомагистрали 26, электропневмоклапана 27, сопла 28 и блока 29 отсоса, и систему, управления. Приспособление 14 выполнено в виде кронштейна 30, стакана 31 для закрепления гироскопа 15, установленного на кронштейне 30 с возможностью поворота вокруг горизонтально оси, перпендикулярной направлению движения плиты 6, для чего предназна чен червячный редуктор 32 второго шагового двигателя 33, связанного че рез червячный редуктор 32 со стаканом 31, третьего и четвертого,регулируемых упоров 34 и 35, установленных на кронштейне 30 и фиксирующих вертикальное и горизонтальное положе кие стакана 31, пальца 36, закреплен ного на оси вращения стакана 31 и Iвзаимодействующего с регулируемыми упорами 34 и 35 в вертикальном и горизонтальном положениях стакана 31, привода, выполненного н виде соленоида 37 и третьего шагового двигателя 38, вал 39 которого выполнен подпружиненным пружиной 40 и с возможностью перемещения в сеевом направлении так, что в правом крайнем положении взаимодействует своей спиральной торцовой поверхностью с выполненной.подобным образом торцовой поверхностью вала гироскопа 15. Система управления выполнена в виде соединенных последовательно. датчика 41 опорного сигнала, формирователя 42 и фазовращателя 43, выход которого связан с входом вибровозбудителя 2, двух каналов 44 и 45 электрической пружины, каждый из которых содержит последовательно соединенные датчик 46 (47) угла, усилитель-демодулятор 48 (49) и датчик 50 (51). момента, блока 52 тестконтроля, выполненного в виде последовательно соединенных избирательного усилителя 53, амплитудного детектора 54 и цифрового вольтметра 55, последовательно соединенных второго формирователя 56 и цифрового фазометра 57, второй вход которого связан с выходом формирователя 42, вход iBTOporo формирователя 56 соединен с выходом избирательного усилителя 53, вход которого подключен к выходу датчика 46 угла первого канала 44 электрической пружины, блока 58 питания, подключаемого к гироскопу 15, управляющей ЭВМ 59, входы которой соединены с выходами цифровых вольтметра 55 и фазометра 57, и выходами усилителей-демодуляторов 48 и 49, блока 60 управления, первый вход которого соединен с управляющей ЭВМ 59, и блока 61 управления фиксаторами, входы которого соединены с управляющей ЭВМ 59, выход блока 60 управления соединен с корректирующим лазером 12, выходы блока 61 управления фиксаторами соединены, соответственно: первый - с вторым входом блока 60 управления, второй с первым шаговым двигателем 5, третий - с вторым шаговым двигателем 33, четвертый - с третьим шаговым двигателем 38, пятый - с третьим входом блока 60 управления, шестой - с входами электропневмоклапана 27 и блока 29 отсоса, седьмой - с входом соленоида 37, восьмой - с входами электромагнитных приводов 23-25, девятый с входами усилителей-демодуляторов 48, 49 и блока 58 питания гироскопа 15, десятый - с управляющим .входом фазовращателя 43, выполненного в виде последовательно соединенных генератора 62 пилообразного напряжения, компаратора 63, преобразователя 64 импульсов в синусоидальный сигнал, управляемого ключа 65, усилителя 66 и источника 67 регулируемого опорного напряженич, выход которого связан с вторым входом компаратора 63, а его выход - спервым входом цифро вого фазометр 57. Управляющая ЭВМ 59 выполнена в в де соединенных последовательно коммутатора 68 аналоговых сигналов, аналого-цифрового преобразователя 69, процессора 70 с системой ввода вывода информации и программ (не по казаны) и коммутатора 71 цифровых сигналов, Первый и второй шаговый двигатели 5 и 33 соответственно име моментные муфты (не показаны). Устройство работает следующим образом. Балансируемый гироскоп 15 устанавливают и закрепляют в стакане 31 приспособления 14 и подключают к блоку 58 питания гироскопа 15, уста навливают вакуумный колпак 16 и осу ществлягот создание разряженной газовой среды (блок вакуумирования не показан), В.управляющую ЭВМ 59с ленточного или дисковогопрограммоносителя вводят программу работы, При включении программы управляю щая ЭВМ 59 выдает сигнал, который включает подачу питающего напряжения на выходе блока 58 питания гиро скопа 15, а такж включает усилители-демодуляторы 48 и 49 в обоих каналах 44 и 45 электрической пружины Реализация такого включения может быть осуществлена в виде обычной релейной схемы, содержащей электромагнитное реле с контактами, замыкающими указанные цепи (не показаны) , Начинается разгон гироскопа 15 до рабочей частоты вращения, причем он является зафиксированным по осям чувствительности X и У каналами 44 и 45 электрической пружины. Через промежуток времени, достаточной для осуществления вакуумирования и разгона гироскопа 15 до рабочей частоты fp вращения (i 1, мин в за висимости от марки гироскопа),начинается цикл измерения дисбалансов. Процессор 70 подает по адресу второ го щагового двигателя 33 последовательность кодов, общее число которы соответствует необходимому количест ву импульсов для поворота.стакана 31 на 90 до вертикального положения оси вращения гироскопа 15, Вращение осуществляется от второго шагового двигателя 33 через червячный рейуктор 32, Палец 36 и четвертый упор 35 ограничивают перемещение стакана 31, при достижении им вертикального положении оси вращения гироскопа 1Й, а муфта второго шаговог двигателя 33 отключает его, если требуемое положение достигнуто ране окончания подачи кодов, В данном положении осуществляется замер моментного дисбаланса ротора динамически настраиваемого гироскопа 15, проявляклцегося в виде модуляции сигнала датчиков 46 и 47 угла из-за воздействия на ротор главного момента Mjj дисбалансов. Этот дисбаланс t) определяют по спектру сигналов с одного из датчиков 46 (47) угла, например с выхода датчика 46 угла. Спектр сигналов, первая гармоника которого имеет частоту вращения fp , воспринимается избирательным усилителем 53, где из него выделяется си-, нусоидальный сигнал, величина которого пропорциональна величине, а фаза - углу моментного дисбаланса 1,, Напряжение выпрямляется амплитудным детектором 54 и измеряется цифровым вольтметром 55, работающим в автоматическом режиме. Напряжение с выхода С1МПЛИТУДНОГО детектора 54, пропорциональное величине дисбаланса, поступает через коммутаторо68 аналоговых сигналов на вход аналого-цифрового преобразователя 69, параллельный код на выходе которого воспринимается процессором 70, Цикл опроса коммутатора 68 аналоговых сигналов и аналого-цифрового преобразователя 69 создается соответствующей подпрограммой процессора 70, которая обеспечивает сначала подачу адреса входа коммутатора 68 входных сигналов, соответствующего его первому входу, а затем производит опрос аналого-цифрового преобразователя 69, записыв|ая в память процессора 70 код, соответствукяций величине модуляционного сигнала 1/ , из которого затем определяются моментный дисбаланс по формуле ( , где С - полярный момент инерции ротора;А - экваториальный момент инерции ротора; Ufn - амплитуда модуляционного сигнала датчика 46 угла; к- коэффициент передачи усилительно-преобразовательноготракта (избирательный усилитель ЬЗ, амплитудный детектор 54, коммутатор 68 аналоговых сигналов, аналого-цифровой преобразователь 69), УГОЛ Ч моментного дисбаланса Гд, определяется так, сигнгш с выхода избирательного усилителя 53 воспринимается вторым формирователем 56, где из него формируется строб, соответствующий во времени максимуму 1-й гармоники сигнала Д1 сбаланса, т.е. тяжелому месту ротора. Этот строб вместе с импульсом опорного сигнала, воспринимаемым через .формирователь 42 с выхода датчика 41 опорного сигнала, поступает на входы цифрового фазометра 57, работающего в автоматическом режиме, где выделяется парешлельный код, соответствующий углу дисбаланса Сд,, который индицируется также на цифровом табло фё.зометра 57, Код на его выходе воспринимается процессором после завершения подпрограммы записи величины дисбаланса, а угол дисбаланса Вдд записывается в. памяти процессора. После запкси- моментного дисбашанса jj устройство начинает записывать статический дисбаланс Dj. гироскопа 15, при определении которого производят запись дрейфа в цепи канала 44 электрической пружины при неподвижной плите б в указанном положении гироскопа 15,.Этот ток воспринимается через коммутатор 68 аналоговых сигналов nci запросу с процессора 70 аналого-цифровым преобразователем 69 и записывается в память процессора 70. После выполнения э.той подпрограммы процессор 70 включает электромагнитные приводы 23 25, которые освобождают корпус 4 вибростола 3 от фиксаторов 17 - 19, обеспечивая его, подвижность в вертикальном положении. Через временной промежуток (tr 0,5 с) процессор 70 выдает код, который включает управляемый ключ 65, разрешая тем самьам прохождение синусоидального сигнала на вибровозбудитель 2. Указанный синусоидальный сигнал формируется так. Отметка на поверхности ротора гироскопа 15 формирует при его вращении на выходе датчика 41 опорного сигнала, установленного в плоскости расположения датчика 46 угла, иМ;пульсы с частотой fр вращения ротора гироскопа 15. После их калибровки по длительности и амплитуде в формирователе 42 они пост ;пают в фазовращатель 43, где запускают, генератор 62, пилообразное напряжение с вь1хода которого сравнивается по амплитуде с постоянным регулируемым напряжением с выхода источника 67 в компараторе 63. Задний фронт полученных таким образом импульсов регулируется в пределах t- Q - в зависимости от амплитуды постоянного напряжения с выхода источника 67, а следовательно, характеризует фазовый сдвиг сигнала относительно отметки на роторе гироскопа 15 и служит опорным для запуска преобразователя 64 импульсов в синусоидальный сигнал начальная фаза которого совпадает с фазой заднего фронта. Этот сигнсш после прохождения через управляемый ключ 65 и усиления в усилителе 66 возбуждает колебания вибровоэбудителя 2. Изменяя фазу этих колебаний изменением (вручную) амплитуды постоянного напряжения, добиваются максимального показания тока дрейфа (измеритель тока не показан), снимаемого с выхода усилителя-демодулятора 48. Это напряжение через промежуток времени (Т 20 с), достаточный для выбора фазового сдвига фазовращателя 43, записывается через коммутатор 68 аналоговы: сигналов и аналого-цифровой преобразователь 69 в па.мять процессора 70, где затем по формуле определяется величина статического дисбаланса
п l т 1 , ),., к-хн
ст
а
tnax
где К
- коэффициент ропорциональ но-сти (К, |);
К. крутизна системы датчика
46 момента - усилитель-демодулятор 48 измерительного канала X; Н - кинетический момент ротора
гироскопа;
амплитуда ускорения вибрации вдоль оси вращения ги . роскопа 15,
Угол дисбаланса VCT относительно ртметкина роторе гироскопа 15 регйстрируется цифровым фазометром 57 работающим в автоматическом режиме. Параллельный код с его выхода воспринимается после окончания подпрограммы записи величины статического дисбаланса
После этого с выхода процессора 70 последовательно поступают коды, отключающие вибровозбудизрель 2 и арретирунедйе фиксаторами 17 - 19 вибростол 3 за счет действия пружин 20 22. Процессор 70 выдает также по адресу шагового двигателя 33 последовате1шность кодов, общее число которых соответствует необходимому для поворота стакана 31 на 90° до горизонтального положения оси вра.щения гироскопа 15. Система готова для определения осевого дисбаланса 1)0 гироскопа 15, представляющего несовпадение центра его масс с центром подвеса ротора вдоль оси вращени Для его определения измеряют ток Jx дрейфа в указанном положении оси вращения гироскопа в канале 44 элект рической пружины, вводят описанным способом в память процессора 70 и по формуле
где KO - коэффициент пропорциональности
К К Кд„ Н,
определяют величину осевого дисбаланса DO.
. Угол осевого дисбаланса Ед не играет роли, так как дисбаланд DO
направлен вдоль оси вращения ротора гироскопа 15. Знак его определяет плоскость коррекции, где он находится: + -,плоскость Аи - плоскость В.
После определения указанных дисбалансов в соответствии с внутренней подпрограммой процессор 70 отключает блок 58 питания гироскопа 15 и каналы 44 и 45 электрической пружины. Гироскоп 15 начинает тормозиться до
); ()
TЪ -2K A& mi-geO I
A ,, i
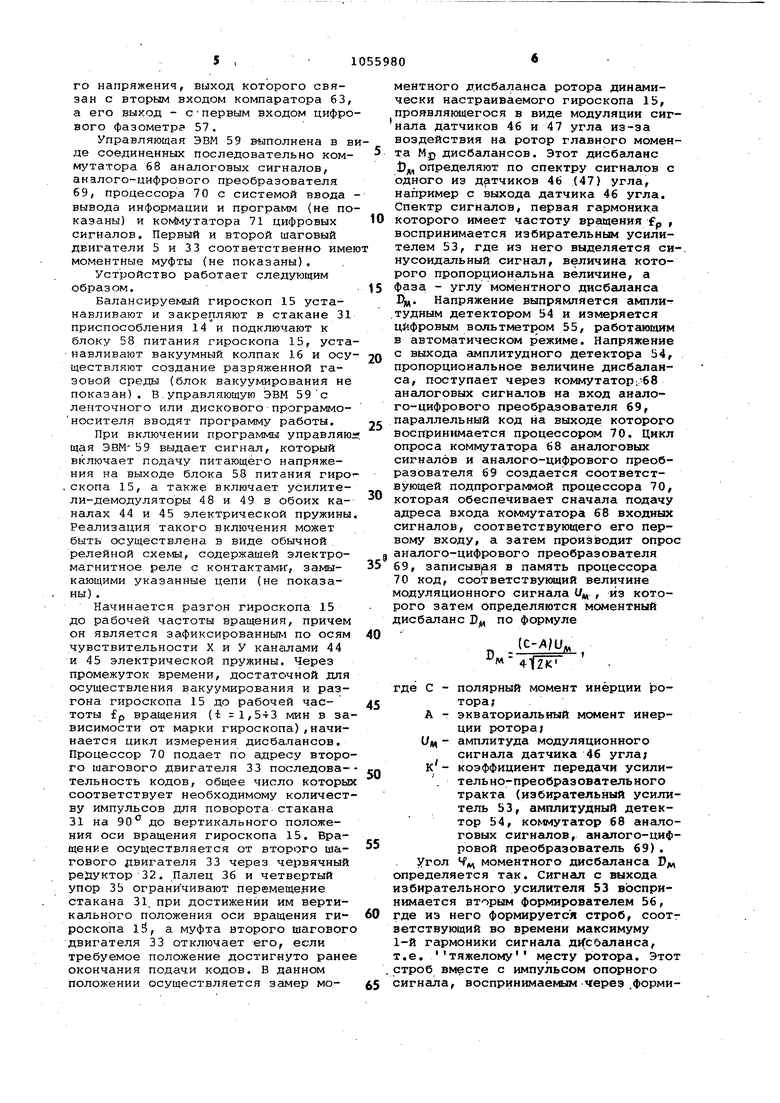
полной остановки, затем процессор 70 осуществляет преобразование замеренных дисбалансов РМ о целью уменьшения величины удаляемой массы и приведения их к 4-м точкам на поверхности ротора гироскопа 15, В результате определяются величины суммарных неуравновешенных масс (g,jf
(et и углы (B) f TA{BJ Эти преобразования осуществляют решением следующей системы уравнений
2 /I
.S M DCTT CT
где P - радиус коррекции; 2 - расстояние между плоскостями А и В коррекции; д I 8 расстояние от плоскостей коррекции А и В до центра подвеса ротора гироскопа 15 После расчета величин неуравновешенных масс roj и углов Ч суммарных дисбалансов осуществляют их коррекцию. Через время (tz30 с), доста- точное для остановки ротора гироскопа 15, код с выхода процессора включает соленоид 37, который выдвигает вал 39 третьего шагового двигателя 38, и последний по своей спиральной поверхности соединяется с валом ротора гироскопа 15. После .этого на шаговый двигатель 5 постуйает последовательность кодов, количество которых позволяет переместить плиту 6 с гироскопом 15 в приспособлении 14 в положение, соответствующее совпадению плоскости А ротора ги роскопа 15 с фокусом объектива 13. Упор 9 ограничивает перемещение плиты 6 , а муфта первого шагового двиг
s...n,
,,,
VAcxjsV.D cost/ теля 5 отключает его, если требуемое положение езудет достигнуто ранее окончания его поворота. Аналогичным образом срабатывает третий шаговый двигатель 38, на вход которого подается последовательность кодов, количество которых соответствует повороту на угол Vj; д . Код с выхода процессора 7-0, пропорциональный величине удаляемой массы поступает на первый вход блока 60 управления и обеспечивает накачку лазера до.определенной энергии Wд (r7mj., где К(Т) - коэффициент, характеризующий зависимость величины удаляемой массы энергии лазерного импульса. Процессор 70 выдает следующий кол, но уже на второй вход блока 60 управления, включая накачку лазера 12, в результате чего, в его конденсаторных батареях (не показаны) запасается энергия накачки, пропорцио Нсшьяая величине дисбаланса. После этой подготовки соответствующим кодом включают электропневмоклапан 27 и блок 29 отсоса Возникает направленный поток газа, отсасываемый блоком 29 отсоса, защищающий поверхность ротора гироскопа 15 и фо.кусирухощий объектив 13 от продуктов эрозии,, возникающих при лазерном воздействии. Через промежуток времени (0,1 с), достаточный для срабатывания электропневмоклапана 27 и блока 29 отсоса, кодом с процессора 70 на третий вход блока 60 управлени осуществляется запуск лазера 12, в результате чего с поверхности ротора удаляется неуравновешенная масса nij-д. После этого последовательность кодов с выхода процессора 70 прекращает подачу газа в зону обработки, а также поворачивает третьим шаговым двигателем 38 ротор гироскопа 15 на угол 180°, а затем подпрограмма коррекции дисбаланса повторяется, но уже для величины неуравновешенно массы т«г д. Устранив дисбаланс в плоскости коррекции А, приступают к коррекции дисбаланса в плоскости в. с этой целью процессор 70 подает по адресу шагового двигателя 5 последовательность кодов,, которая вызывает перемещение плиты 6 с приспособлением 14 на расстояние С до плоскости коррекции В. После этого опи- . санным выше образом осуществляется коррекция дисбалансов mj-g и .tn, g во второй плоскости коррекции. После окончания процесса балансировки с выхода процессора 70 последовательно поступают коды, которые отключают накачку лазера 12 и размыкают кинематическую связь между ротором гироскопа 15 и валом 39 третьего шагового двигателя 38. Вакуумный колпак 16 снимается, гироскоп 13 отключается от блока 58. питания и удаляется. Процесс балансировки закончен. Применение в предлагаемом, устройстве приспособления для установки гироскопа, а также осуществление контура управления балансировкой от ЭВМ обеспечивает повышение производительности процесса применительно к . балансировке роторов динс1мически настраиваемых гироскопов.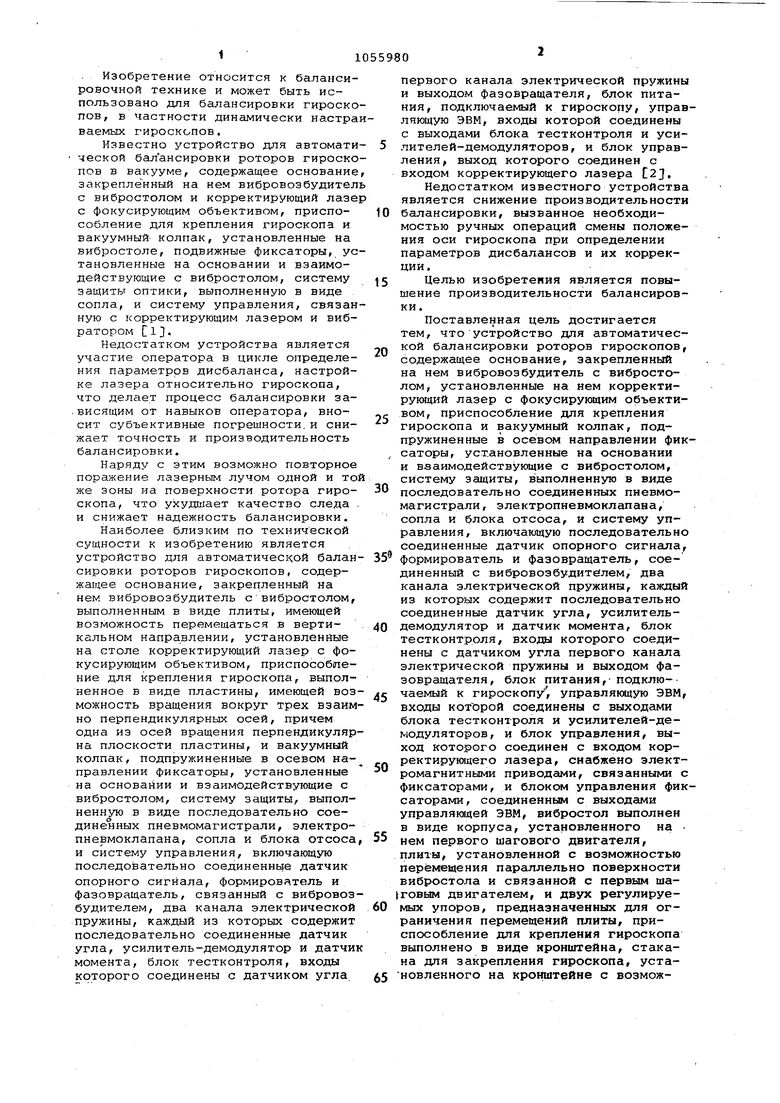

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1988 |
|
SU1649275A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
| Устройство для динамической балансировки роторов | 1985 |
|
SU1293508A1 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ, содержащее основание, закрепленный на нем-вибровоэбудитель с вибросто лом, установленные на нем корректирующий лазер с фокусирующимобъективом, приспособление для крепления гироскопаи колпак, подпружиненные в осев.ом направлении фиксаторы, установленные на основа-. НИИ и взаимодействующие с вт бросто;лом, систему защиты, выполненную в виде последовательна соединенных пневмомагистрали, электропневмоклапана, сопла и блока отсоса, и систему управления, включающую последовательно соединенные датчик, опорного сигнала, формирователь и фазовращатель, соединенный с вибровозбудителем,, два канала электрической пружины, каждый из которых содержит последовательно соединенные датчик уг ла, усилитель-демодулятор и датчик момента, блок тестконтроля, выходам которого соединены с датчиком угла первого канала электрической пружины и выходом фазовращателя, бло питания, подключаемый к гироскопу управляющую ЭВМ, входы которой соединены, с выходами блока тестконтроля и усилителей-демодуляторов, и блок управления, выход которого соединен с входом корректирующего лазерч1,о тличающееся тем, что, с целью повышения производительности балансировки, оно снабжено электромагнитными приводамиj связанными с фиксаторами, и блоком управления фиксаторами, соединенным с выходами управляющей ЭВМ, вибростол выполнен в виде корпуса, установленного на нем первого шагового двигателя, плиты, установленной с возможностью перемещения параллельно поверхности вибростола и связанной с первым шаговым двигателем, и двух регулируе(Л маЕс упоров, прёдназначвнных для ограничения перемещений плиты, приспособление для крепления гироскопа выполнено в виде кронштейна стакана для закрепления гироскопа, установленного на кронштейне с возможностью повоЕюта вокруг оси, перпендикулярной направлению движения плиты, и лежащей в плоскости, параллельной плоскости перемещения плиты, вто ел рого шагового двигателя, связанного со стаканом, третьего и четвертого :л регулируемых упоров, установленных :о эо на кронштейне и фиксирующих параллельное и перпендикулярное плите ;положение стакана, и устанавливаемого соосно гироскопу привода, представляющего собой третий шаговый двигатель и связанный с ним соленоид, закрепленные на торцовой поверхности стакана.
ffm. 2
в
ВиЗВ
ВидВ
Фиг4
Фш.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| патент США № 3935746, кл, G 01 М 1/22, 1976 (прототип) | |||
