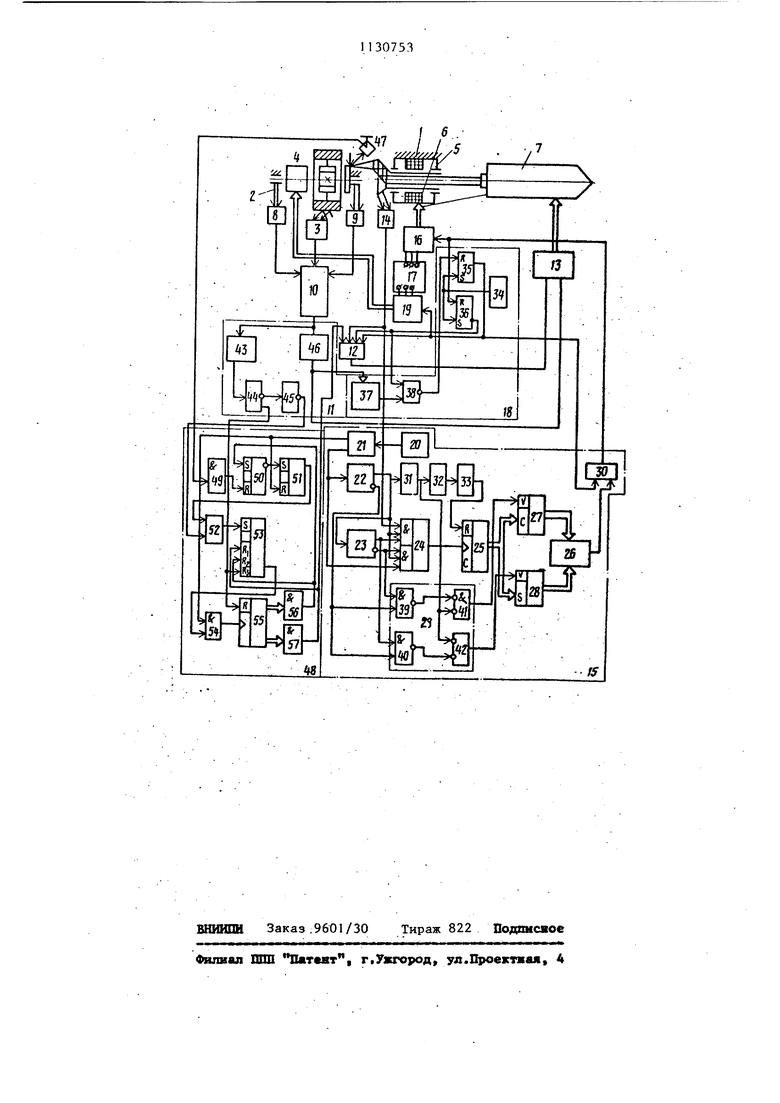
Изобретение относится к технологи приборо- и машиностроения и может быть использовано для балансировки малогабаритных роторов лучом лазера. По основному авт.св.№ 1043499 известно устройство для динамической бал-ансировки лучом лазера роторов, имеющих собственный привод, содержащее основание, закрепленные на нем подвес для установки ротора и установленные соосно с ротором вращающую ся отклоняющую систему (ВОС) с приводом и корректрирующии лазер, датчи опорного сигнала и датчики дисбаланса, связанные с подвесом,-соединенный с датчиками блок измерения, датчик опорного сигнала ВОС, последовательно соединенные блок преобразования, блок синхронизации, второй вход которого соединен с выходом датчика опорного сигнала ВОС, и блок управления, второй вход которого связан со вторым выходом блока преобразования, а выход - с входом управления лазера, второй вход которого подключен к выходу датчика опорного сигнала ВОС, источник переменного тока-, первый блок ключей, входы соединены с источником переменного тока, а выходы - с приводом ВОС, блок команд ных сигналов и второй блок ключей, входы которого соединены с источником переменного тока, а выходы - с приводом ротора, блок управления скоростью ВОС выполнен в виде последовательно соединенных кварцевого генератора, трех делителей частоты, элемента ЗИ-2ИЛИ и счетчика, двух регистров, информационные входы Kotpo рьк соединены с выходом счетчика, блока сравнения .кодов, входы которого соединены с выходами регистров, распределителя импульсов включающего два элемента 2И и два элемента 2ИЛИ, первый и второй входы которого подключены к инверсному выходу второго делителя частоты, а выходы - к входу опроса регистров, элемента 2И первый вход которого подключен к вьпсоду блока сравнения кодов и трех последовательно соединенных мультивибраторов, вход первого из которых третий и четвертый входы элемента ЗИ-2ИЛИ соединены с выходом второго делителя частоты, а выход с пятым входом распределителя импульсов, выход третьего идущего мультивибрато ра подключей к входу сброса счетчика, выход первого делителя частоты связан с пятым входом элемента ЗИ-2ИЛИ, щестой вход которого соединен с датчиком опорного сигнала ВОС, блок командных сигналов выполнен в виде блока включения и сброса, триггеров режима и запрета, S-входы которых подключены к выходу блока включения и сброса, порогового элемента, вход которого соединен с третьим выходом блока преобразователя, и элемента --211, первый вход которого подключен к выходу порогового элемента, второй вход, - к инверсному выходу триггера запрета и третьему входу блока синхронизации, а выход к R-входу триггера режима, выход которого связан с четвертым входом блока синхронизации, управляющим входом второго блока ключей и вторым входом элемента 2И, блок управления скоростью ВОС, выход которого соединен с управляющим входом первого блока ключей и с R-BXO(OM триггера сброса I . Недостатком известного устройства является снижение точности балансировки и качества следа при коррекции неуравновещанных масс за счет образо- вания отлетающего облоя на поверхности ротора при повторном удалении массы из одного и того же участка его поверхности. Такое явление всегда наблюдается при коррекции неуравновешенной массы по величине больщей, чем одновременно удаляемая за лазерный импульс масса. Дисбаланс многократно корректируется при этом не из той же зоны на поверхности ротора, а из близлежащих зон, что объясняется возникающей при малых дисбалансах фазовой -ошибкой в электронных блоках Это явление и является источником облоя на поверхности ротора. Цель изобретения - повышение точности балансировки и улучщение качества следа на поверхности балансируемого ротора. Поставленная це.ль достигается тем, что устройство снабжено датчиком опорного сигнала от зон коррекции и блоком запрета, выполненным в виде пятого элемента.2И, первый вход которого соединен с выходом датчика опорного сигнала от зон коррекций,третьего триггера, R-вход которого подклю чен к выходу пятого элемента 2И, четвертого триггера, S-вход которого подключен к инверсному выходу третье го триггера, третьего элемента 2ИЛИ первый вход которого подключен к выходу четвертого триггера, а второй к инверсному выходу пятого ждущего мультивибратора, пяуго триггера, которого подключен к выходу третьего элемента 2ИЛИ, шестого элемента 2И,первьш вход которого подклю.чен к выходу пятого триггера, а второй вход соединен с вторым входом пятого элемента 2 И ,, R-BXOдом четвертого триггера и со вторым выходом первого делителя частоты, второго двоичного счетчика С-вход которого подключен к выходу шестого элемента 2И, а R-вход соединен с выходом четвертого ждзпцего мультивибратора, первого и второго многбвходозых элементов И, подключенных входами к выходам второго двоичного счетчика, выход первого многовходового элемента И подключен к S-входу третьего триггера и к первому В-ЙХОДУ пятого триггера а выход второго - к первому входу блока синхронизации и ко второму R-входу пятого триггера, третий Й-вход которого подключен к выходу четвертого ждущего мультивибратора. На чертеже приведена блок-схема устройства для.динамической балансировки лучом лазера роторов. Устройство содержит основание 1, подвес 2, в котором устанавливается ротор, датчик 3 опорных импульсов, привод 4 ротора, расположенные соосно с ротором, вое 5 с приводом 6 и лазер 7, датчики 8 и 9 дисбаланса, блок 10 измерения, входы которого подключены к выходам датчиков 8 и 9 блок 11 преобразования, блок 12 синхронизации, блок 13 управления, выход которого соединен с лазером 7, датчик 14 опорного сигнала ВОС, бло 15 управления скоростью БОС, первьщ блок 16 ключей, источник 17 перемен ного тока, подключенный к блоку 16 ключей, ёлок 18 командных сигналов, второй блок 19 ключей, подключенный к источнику 17, блок 15 управления скоростью вое выполнен в виде после довательно соединенных кварцевого генератора 20, делителей 21-23 част ты, элемента 24 ЗИ-2ИЛИ и счетчика 25, блока 26 сравнения кодов, регис ров 27 и 28, входы которых подключе ны к выходам счетчика 25, а выходы к входам блока 26 сравнения кодов, распределителя 29 импульсов, элемента 30 2И и последовательно соединенных трех ждущих мультивибраторов 31-33, блок I8 командных сигналов выполнен в виде блока 34 включения и сброса, триггера 35 режима и триггера 36 запрета, выход которого соединен с третьим входом блока синхронизации, порогового элемента 37 и второго элемента 38 2И. Распределитель 29 импульсов выполнен в виде третьего и четвертого элементов 39 и 40 2И и элементов 4.1 и 42 2ИЛИ, блок I 1 преобразования выполнен в виде последовательно соединенных порогового элемента 43, ждущих мультивибраторов 44 и 45 и амплитудного детектора 46. Кроме того, устройство содержит датчик 47 опорного сигнала от зон коррекции и блок 48 запрета, выполненный в виде последовательно соединенных пятого элемента 49 2И, соединенного R-входом третьего триггера 50, подключенного S-входом к инверсному его выходу четвертого триггера 54 , третьего элемента 52 2ИЛИ, подключенного S-входом пятого триггера 53, шестого логического элемента 54 2И, подключенного С-входом второго двоичного счетчика 55 и связанного с его выходами- многовходового элемента 56 И, выход которого связан, с S-вхбдом третьего триггера 50 и первым R-входом пятого триггера 53, и второго многовходового элемейта 57 И, подключенного к выходам второго двоичного счетчика 55, выход второго многовходового элемента 57 И, связан- со вторым R-входом пятого триггера 53 и первым входом блока 12. Датчик 47 опорного сигнала от зон коррекции может быть выполнен, например, оптического типа, аналогично датчику 14 опорного сигнала БОС 5,устанавливается в плоскости расположения датчиков 8 и 9 дисбаланса (например, в горизонтальной плоскости со стороны указанньж датчиков ) и выставлен у технологической канавки в плоскости вибрации, так что воспринимает следы на поверхности ротора, как импульсы тока jga своем выходе. Устройство работает следующим образом. Балансируемый ротор устанавливаете ся на подвесе 2 и подключается приводом 4 к блоку 19 ключей. Запускаете ся блок 34 включения и сброса и имт пульс с его выхода задним фронтом 5.1 устанавливает триггеры 35 и 36 режим и запрета в состояние логической еди ницы. Триггер 36 запрета удерживает от срабатывания блок 12 синхронизаци и триггер 35 режима от срабатывания до разгона ротора и БОС 5 дочастоты балансирования. Сигнал логической единицы-с выхода триггера 35 режима включает блоки 16 и 19 ключей (блок 16 ключей через элемент 30 2И ) ,через которые на приводы 4 и 6 ротора .и БОС 5 с выхода источника 17 пере.менного тока начинают поступать переменные токи рабочей частоты. Ротор и БОС 5 начинают разгоняться. При вы ходе на рабочие обороты, причем в силу большей инерционности БОС 5 раз гоняется медленнее, чем ротор, сигна с блока 15 управления скоростью БОС по R-входу сбросит в начальное положение триггер 36.запрета, сигнал с инверсного выхода которого -разрешит срабатывание блока 12 синхррнизации и через второй элемент 38 2И подготовит возврат триггера 35 режима по R-входу, если дисбаланс ротора в плоскости коррекции не превьш1ает по величине поля допуска. Если это не так, то будет осуществлен цикл коррекции дисабаланса. Дисбалансы ротора в плоскостях коррекции воспринимаются датчиками 3,8 и 9 и преобразуются блоком 10 измерения в два синусоидальных напряжения., первое из которых характеризует величину и угол дисбаланса в одной, а втброе в другой плоскости коррекции. Роль этого блока может выполнять, например электронный блок балансировочного станка 0-го класса типа Луна 6365/0027. Напряжение, характеризующее дис баланс в требуемой плоскости коррекции, воспринимается блоком 11 преоб разования, где из него с помощью порогового элемента 43 формируются прямоугольные импулвсы, начальная фаза которых несет информацию об угле дисбаланса. Эти импульсы запускают четвертый и пятый ждущие мультивибраторы 44 и 45, формирующи сдвинутые относительно друг друга на величину f короткие импульсы длительностью t - v Тр .,где Тр - период вращения ротора. Импуль Т устанавливает в начальное положение пятый триггер 53 и второй двоичный счетчик 55. Количество 3 двоичных разрядов п во втором счетчике 55 выбирается по соотношению )11 где INT - целая часть числа; минимальный радиус зоны коррекции в балансируемых роторах; минимально допустимое расстояние между зонами коррекции без их взаимного перекрытия. Так, при R 30 мм. Е-., 2 количество двоичных разрядов счетчика 55, п 7, частота f, импульсов, заполняющих второй счетчик 55, определяется числом зон коррекции в балансируемом роторе и находится в пределах fp2 где IP - частота вращения ротора при балансировке, а длительность импульса равна Источником для формирования ука3анных импульсов частоты fj для роторов, имеющих синхронный привод, является первый делитель 21 частоты, а для роторов, имеющих асинхронный привод - датчик 3 опорных сигналов, наносимых на ротор и равных по величине количеству выбранных зон коррекции. Импульс t через третий элемент 522ИЛИ устанавливает пятый триггер 53в состояние логической единицы и, тем самым, разрешает через щестой элемент 54 2И поступление импульсов частоты fj на второй счетчик 55. а выходе второго счетчика 55 подклюен первый многовходовый элемент И таким образом, чтобы импульс на его ыходе формировался при подаче на ход второго счетчика 55 импульсов, оличество которых m определяется з уравнения fsK-..O Чц 90 - фазовый сдвиг тяжелого места относительно начальной фазы; Ч., - фазовое запаздывание сигнала дисбаланса в электронных блоках устройства. f, 28800 Гц, Так, например, при 90°, . 400 Гц, 4-, О, .f Это означает, что к семиразрядном второму счетчику 55 подключается первый многовходовый элемент 56 И к второму и пятому прямым выходам его разрядов, если считать с младшег разряда, и 1-му, 3-му,4-му, 6-му и 7-му инверсным выходам, чтобы сигнал на выходе элемента 56 И появился на 18-импульсе. Фазовый сдвиг этого импульса относительно начальной фазы сигнала дисбаланса будет Ч„-Чэ 90 и это значит, что через поле действия датчика 47 опорного сигнала проходит тяжелое место ротора в данной плоскости коррекции. Импульс с выхода элемента 56 И сбрасывает задним фронтом пятый триггер 53 в исходное положение логического О и счет импульсов вторым счетчиком 55 прекращается. Одновременно четвертый триггер 50 устанавливается в состояние логической единицы. В поле дейст вия датчика- 47 .опорного сигнала находится текущее значение тяжелого места ротора в данной плоскости корipeкции,,которое анализируется на пред- мет наличия следа (лунки) от лазерно го действия. Если такой имеется, то указанный датчик 47 формирует на .своем выходе импульс длительностью , 1; ,равный длине занятой лунки(или лун.ками , зоной в плоскости коррекции. Этот импульс блокирует подачу импульсов частотой fj по R-входу третьего триггера 50. Так как триггер 50 находится в состоянии логичес кой единицы, то возврат его в исходное состояние может быть осуществлен только после прекращения действия импульса от зоны, то есть после прохождения следа от взаимодействия через поле действия датчика 47. Первый .импульс частотой з через пятый элемент 49 2И сбросит третий триггер 50 в исходное состояние, причем задний фронт импульса на его выходе установит четвертый триггер 51 в сос тояние логической единицы, а задний фронт первого импульса частотой f. 7538 установит его в состояние логического нуля. Таким образом, на выхода четвертого триггера 51 формируется импульс длительностью Tj . Этот импульс характеризует прохождение через п-оле действия датчика 47 опорных .сигналов первой свободной от следов зоны, относительно которой и будет корректрироваться дисбаланс. Этот импульс должен быть сдвинут во времени на угол Чс от поля действия датчика 47 (горизонтальная плоскость со стороны датчика 8 и 9 дисбаланса до начальной зоны взаимот действия ла.з ерного луча ). Обычно угол . Чтобы осуществить этот фазовый сдвиг второй счетчик 55 должен отсчитать количество импульсов определенное с учетом уравнения 4, как Поэтому второй многовходовый элемент 57 И включен таким образом, чточ бы импульс на его выходе бып оформирован при коде т,,определяемом как V m . + m 3 -) f 400Гц, 28800 Гц, Так, при (Уц-Ч- Н 30% 24. m5 18 + 6 Этот код реализуется подключением элемента 57 И к 4-му и 5-му прямым выходам разрядов семиразрядного втои рого счетчика 55, если считать с младшего разряда, и 1-му, 2-му,3-му, 7-му, 6-му инверснь1м его выходам. Сформированный m 3 импульс на выходе элемента 57И является стробом свободной зоны вблизи тяжелого места ротора в плоскости коррекции и он поступает на блок 12 синхронизации и сбрасывает задним фронтом одновременно пятый триггер 53 в исходное состояние, прекращая счет импульсов вторым счетчиком 55. С помощью амплитудного детектора 46 выделяется постоянное напряжение, пропорциональное дисбалансу. Это напряжение управляет через блок I3 управления энергией импульсов лазера 7,(в качестве блока управления может быть использована система управления СУМ-4 лазера типа Квант), а также является опорным для порогового элемента 37, настроенного на амплитуду сбрасывания, пропорциональную остаточному дисбалансу, и отключающего через второй элемент 38 2И процесс балансировки. если величина дисбаланса меньше .допуска. Строб тяжелого места ротора сравнивается в блоке 12 синхронизации со стробом, снимаемым с датп: чика 14 опорного сигнала ВОС 5 и при их совпадении (при условии включения триггера 35 режима и выключении триггера 36- запрета) инициирует запуск лазера 7 через блок 13 управления. Лазерный импульс в пределах поворота ротора на угол 20-1 20 производит коррекцию неуравновешанной массы .и на поверхности ротора возникает след в виде глухого отверстия. Процесс автоматически повторяется до достижения дисбалансом поля допус ка из новых зон на поверхности ротора, после чего пороговый элемент 37 отключает триггер 35 режима, прекращается подача питающих напряжений 4 и 6 ротора и ВОС 5. Они останавливаются, после чего ротор поворачивают и балансируют в другой плоскости. При работе схемы важным элементом определяющим частоту синхронизации совпадений положений тяжелого мест и фокуса объектива ВОС 5, а следовательно, и производительность балансировки, является обеспечение режима взаимного их проскапьзьгеания с частотой 2-5 Гц, что обеспечивается характером работы блока I5.управлени скоростью ВОС 5.. При работе блока 15 последовательность импульсов стабильной частоты с выхода кварцевого генератора 20 де. лится делителями 21-23 частоты, соот ветственно первым - до частоты зон запрета f и частоты fp балансировки вторым - до f 0,5 Гц.и третьим до частоты fj 0,25 Гц. Указанные напряжения и импульсы с выхода датчика 14 опорного сигнала ВОС 5 коммутируются элементом 24 ЗИ-2ИЛИ в последовательность пачек импульсов, длительностью каждая т 1 с, и частотой f и, содержащих четная - импульсы частотой feoc ,а нечетная частотой fggj. вращения ВОС 5, и несут информацию о текущем и заданном значениях частоты вращения ВОС 5. Эти импульсы записываются счетчиком 25, предварительно сбрасываемым в нулевое положение импульсами частотой f с выхода третьего ждущего мультивибратора 53, а импульсы опроса регистров 27 и 28 с первого ждущего мультивибратора 31. Параллельные коды, соответствующие заданной fgocj, текущей Г .частотам вращения ВОС 5 последовательно.записываются регистрами 27 и 28 импульсами с выходов распределителя 29 импульсов, причем последний выдает импульсы частотой f и сдвинутые относительно друга на половину периода. Это необходимо для того,.чтобы записывать в регистре 27 код, соответствующий заданной частоте вращения ВОС 5, а в регистре 28 - текущей частоты вращения ВОС 5. Коды выходов регистров 27 и 28 сравниваются блоком 26 сравнения кодов, так что сигнал на его выходе равен логической единице при fgoj. И логическому нулю в противном случае. Этот сигнал через элемент 30 2И и блок 6 ключей управляет скоростью вращения ВОС 5, а также первым перепадом отключает триггер 36 запрета. Таким образом, изобретение позволяет повысить точность балансировки и повысить качество следов на поверхности ротора за счет устранения o6t поя при многократном поражении одной и той же зоны эа счет введения в устройство датчика опорного сигнала от зон коррекции блокл запрета, предназначенного для формирования сигнала от зоны свободной от следов взаимодействия лазерного луча при (Коррекции дисбаланса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамической балансировки лучом лазера роторов | 1982 |
|
SU1043499A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |
| Устройство для динамической балансировки роторов | 1984 |
|
SU1173214A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1182297A2 |
УСТРОЙСТВО ДОЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛУЧОМ ЛАЗЕРА РОТОРОВ по авт.св. № 1043499,0 т л и ч а ю щ е е с я тем, что, с целью повышения точности балансировки и ка.чёства следа на поверхности балансируемого ротора, оно снабжено датчиком опорного сигнала от зон коррекции и блоком запрета, выполненным в виде пятого элемента 2И, первый вход которого соединен с выходом датчика опорного сигнала от зон коррекции, третьего триггера, R-вход которого подключен к .выходу пятого элемента 2И, четвертого триггера, S-вход которого подключен кинверсному выходу третьего триггера, третьего элемента 2ИЛИ, первый вход которого подключен к выходу четвертого триггера, а второй - к инверсному выходу пятого ждущего мультивибратора,, пятого триггера, S-вход которого подключен к выходу третьего элемента 2Ш1И, шестого элемента 2И, первый вход которого подключен к выходу пятого триггера, а второй вход соединен с вторым входом пятого элемента 2И, R-входом четвертого триггера и со вторым выходом первого делителя частоты, второго двоичного счетчика, С-вход которого подключен к выходу шестого § элемента 2И, а R-вход соединен с выходом четвертого ждущего мультивибра(Л тора, первого и второго многовходо- , вых элементов И, подключенных входами к выходам второго двоичного счет чика, выход первого многовходового элемента И подключен к S-входу третьего триггера и к первому R-BXOДУ пятого триггера, а выход второго 00 к первому входу блока синхронизации о и ко второму R-входу пятого триггера, третий R-вход которого подключен к вьрсоду четвертого ждущего мультивибСП ратора . 00