20
25
30
Изобретение относится к технологии приборостроения и может быть использовано для балансировки роторов, имекщих собственный привод, в частности роторов, динамически настраи- вае14ых гироскопов лучом лазера.
Целью изобретения является повышение точности и производительности балансировки, что достигается ис- ю пользованием в устройстве пассивного модулятора и модификацией структуры электронного блока устройства с целью обеспечения двух этапов коррекции .дисбалансов: на предваритель- 15 ном этапе нелинейного и линейного режимов автоматической балансировки за счет управления энергетической накачкой лазера и на окончательном этапе da счет пространственной модуляции лазерных импульсов постоянной энергии
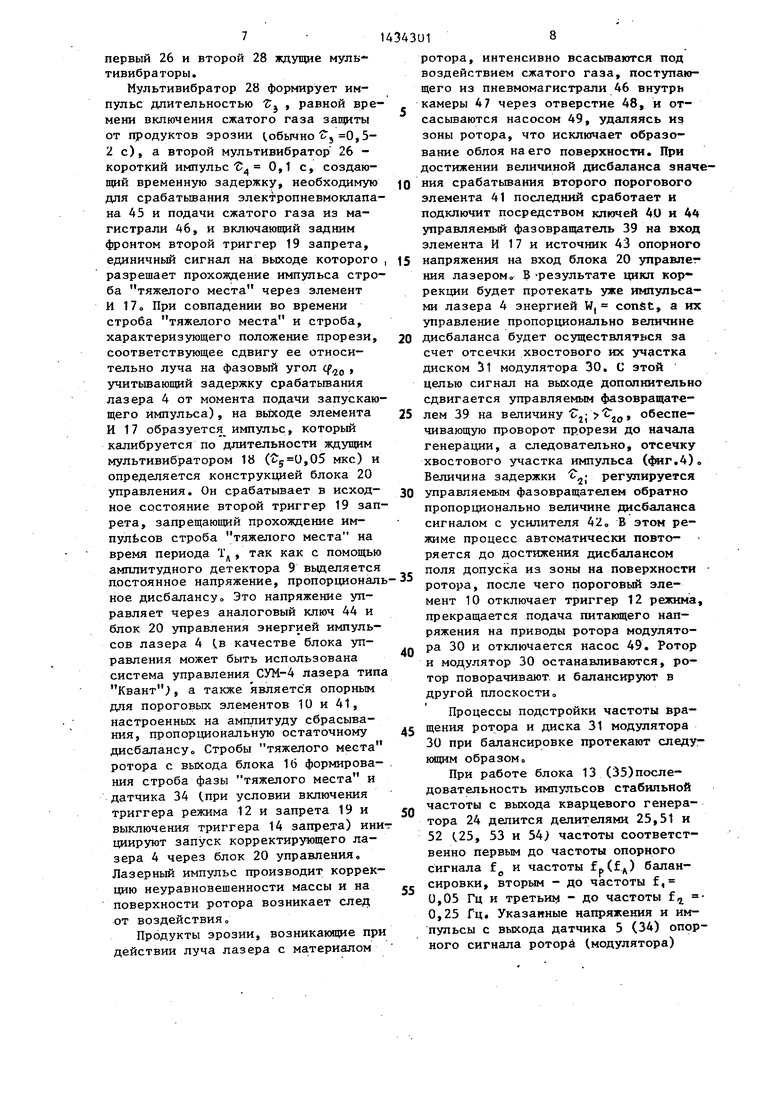
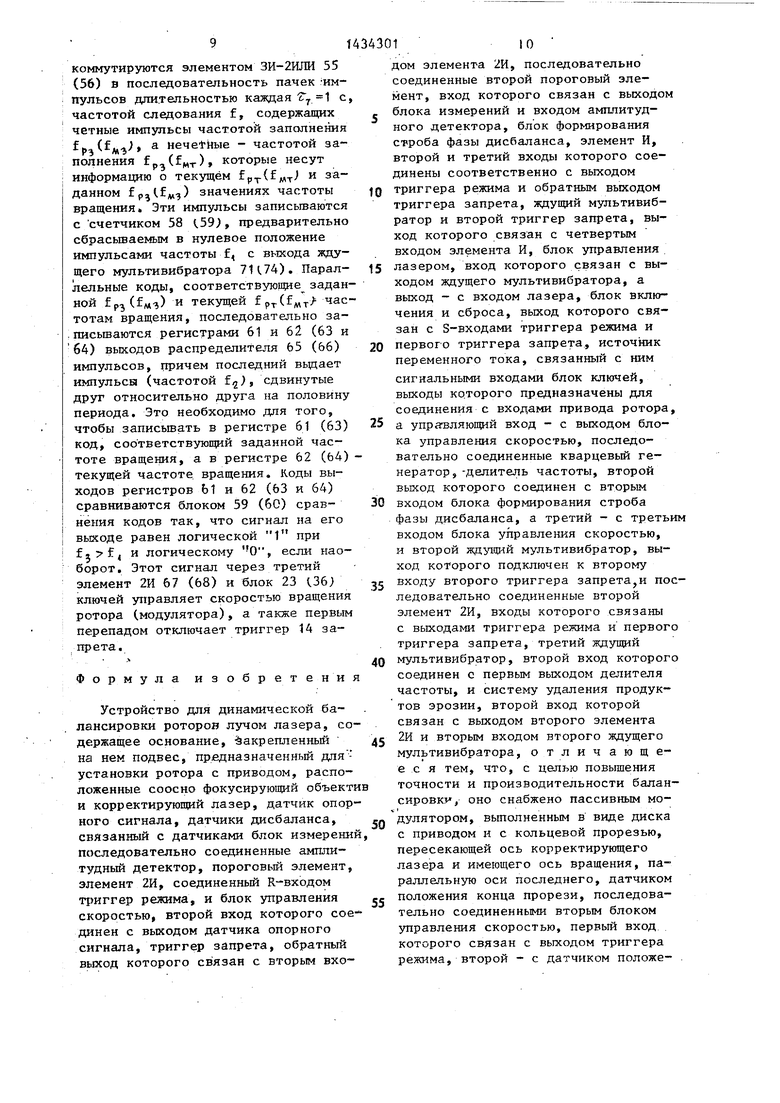
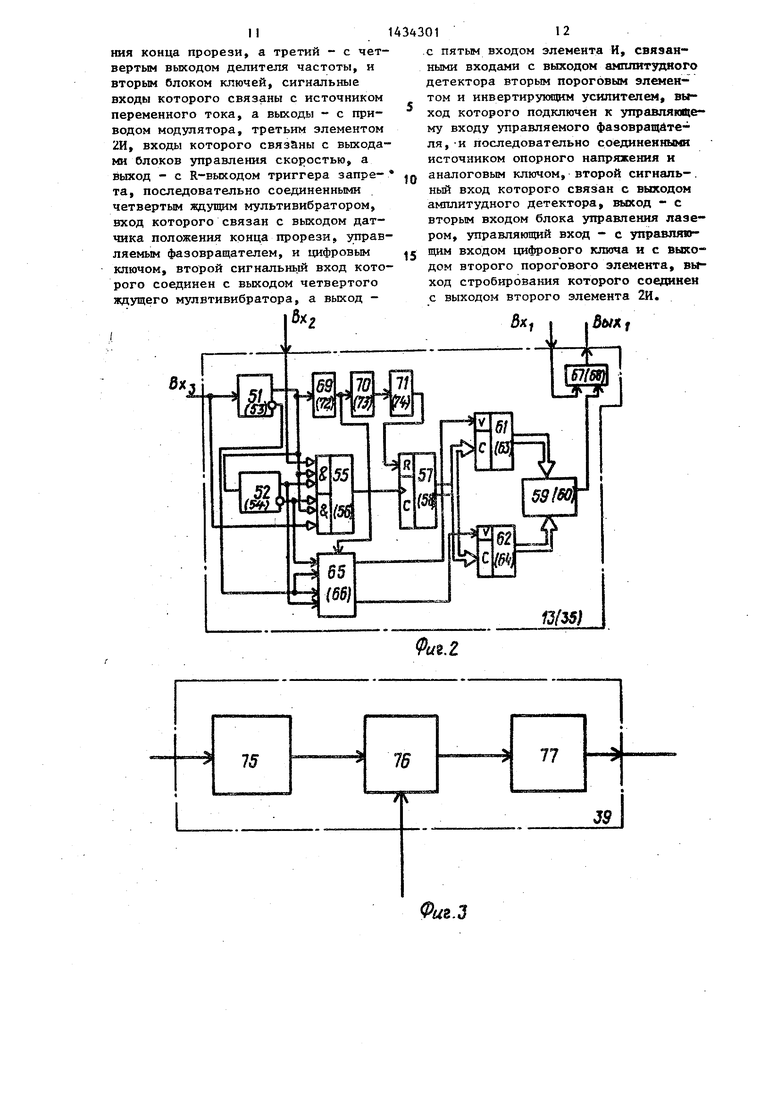
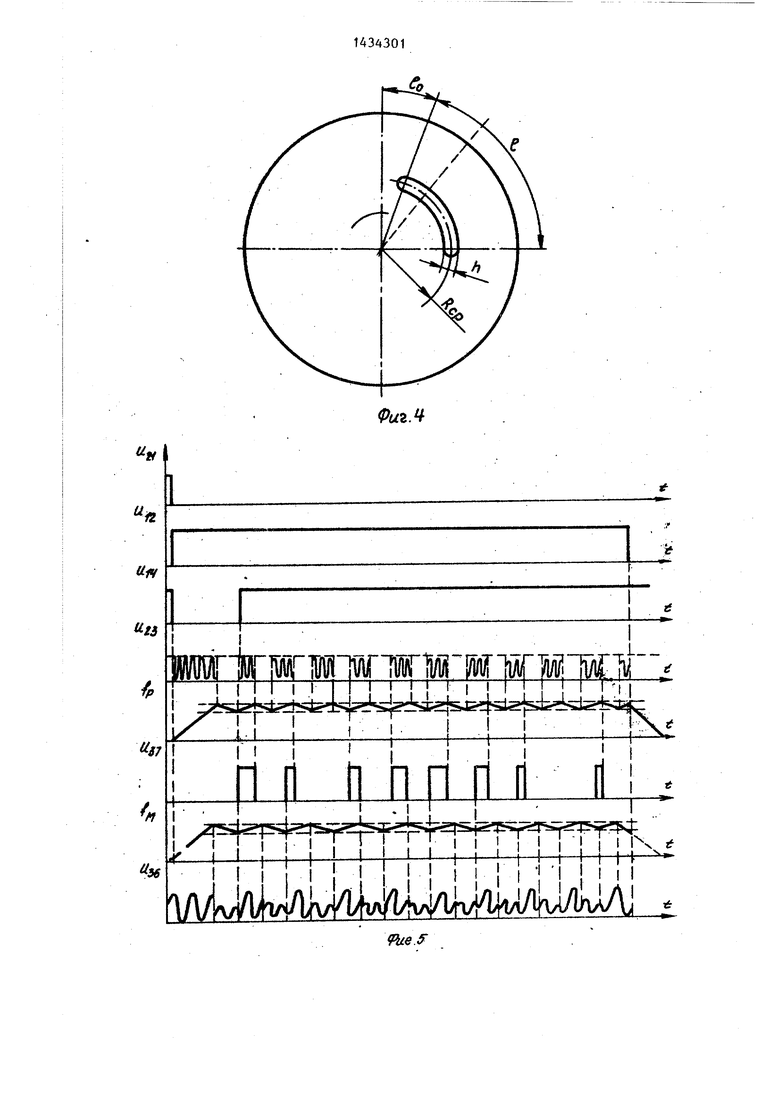
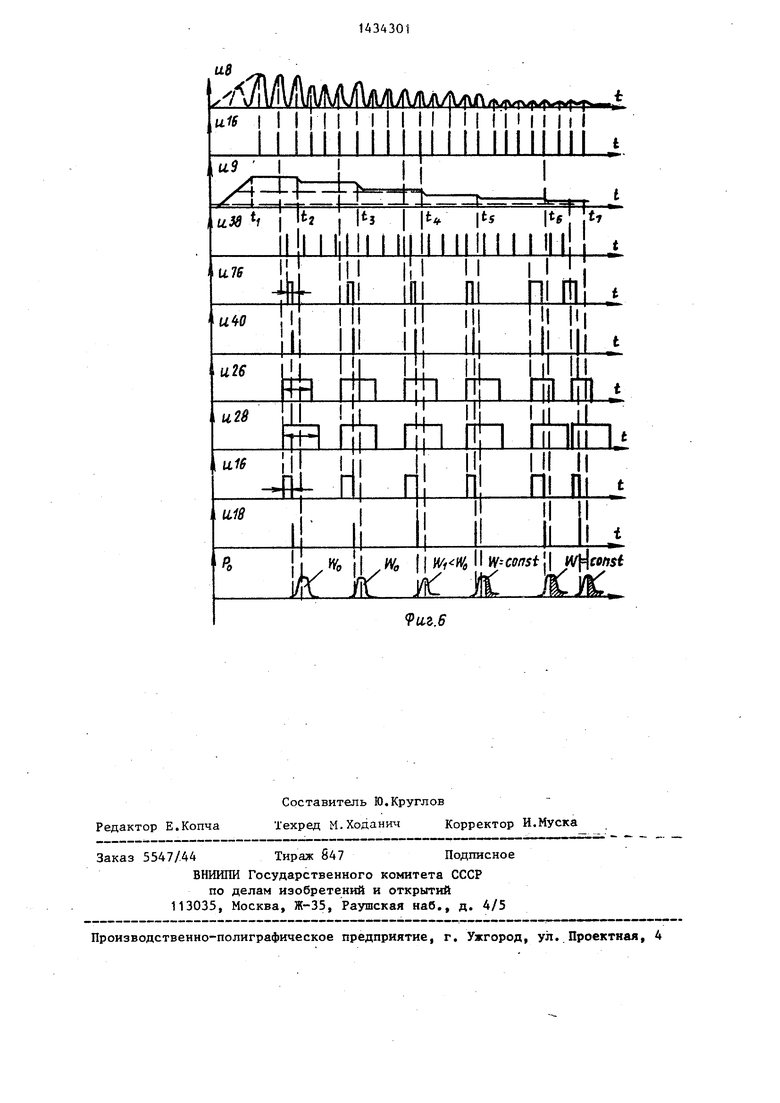
На фир. 1-3 приведена структурная схема устройства; на фиг.4 схема расположения прорези в диске; на фиг.5 и 6 - осциллограм, характеризующие работу устройства (,по оси абсцисс отложено время t, по оси ординат - напряжение U, частота вращения t и энергия импульсов генерации W, п соответствует номеру блока на структурной схеме.
Устройство для динамической баансировки лучом лазера содержит основание 1, закрепленный на нем 35 подвес 2, предназначенньш для уста- новки ротора с приводом, расположенные соосно фокусирующий объектив 3 корректирующий лазер А, датчик 5 опорного сигнала и датчики 6 и 7 дис- 40 баланса, связанньй с датчиками 5-7 блок 8 измерений, последовательно соединенные амплитудный детектор 9, пороговый элемент 10, элемент 2И 11, соединенньй R-входом триггер 12 ре- 45 има, и блок 13 управления скоростью, второй вход которого соединен с выходом датчика 5 опорного сигнала, триггер 14 запрета, обратный выход
которого связан с вторым входом эле- eg
мента 2И 11, последовательно соединенные второй пороговой элемент 15, вход которого связан с выходом блока 8 измерений и входом амплитудного детектора 9, блок 16 формирования строба фазы дисбаланса, элемент И 17, второй и третий входы которого соединены соответственно с выходом триггера 12 режима и обратным выходом
20
25
30
ю 15
3540 45
eg
434301
триггера
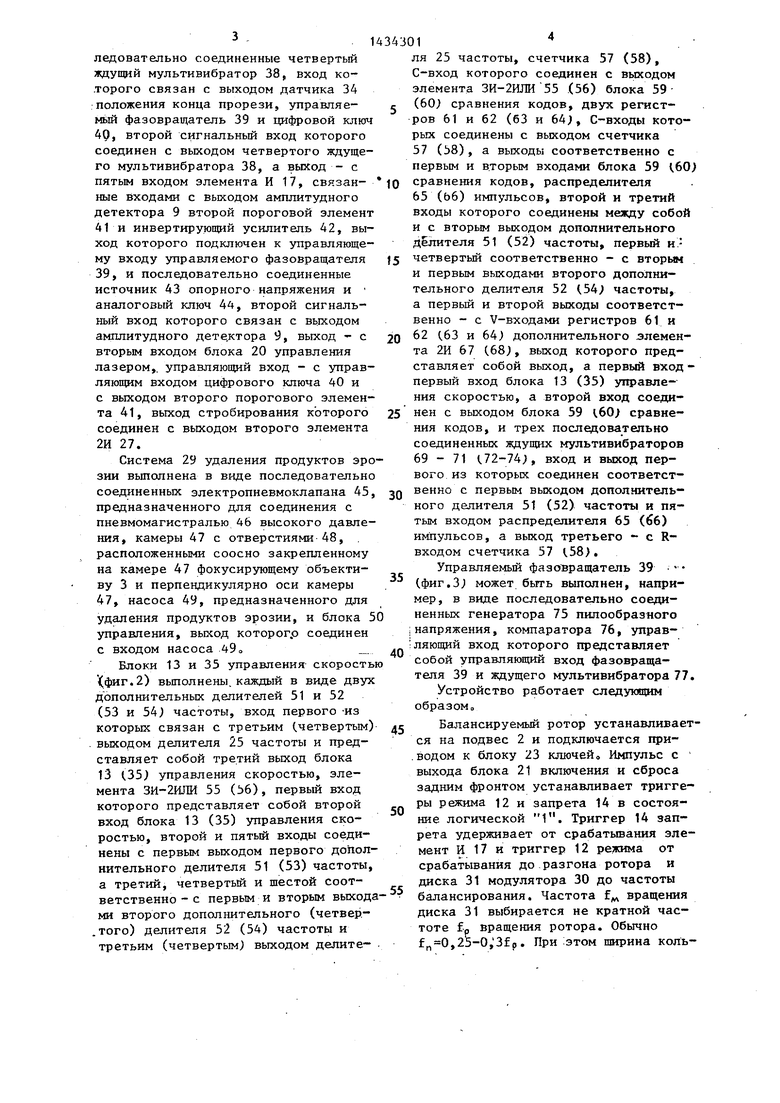
14 запрета, ждущнй мультивибратор 18 и второй триггер 19 запрета, выход которого связан с четвертым входом элемента И 17, блок 20 управления лазером, вход которого связан с выходом ждущего мультивибратора 18, а выход - с входом лазера 4, блок 21 включения и сброса, выход которого связан с S-входами триггера 12 режима и первого триггера 14 запрета, источник 22 переменного тока, связанный с ним сигнальными входами блок 23 ключей, выходы которого предназначейы для соединения с входами привода ротора, а управляющий вход - с выходом блока 13 управления скоростью, последовательно соединенные кварцевый генератор 24, делитель 25 частоты, второй вьрсод которого соединен с вторым входом блока 16 формирования строба фазы дисбаланса, а третий - с третьим входом блока 13 управления скоростью, и второй ждущий мультивибратор 26, выход которого подключен к второму входу второго триггера 19 запрета, последовательно соединенные второй элемент 2И 27, входы которого связаны с выходами триггера 12 режима и первого триггера 14 запрета, третий ведущий мультивибратор 28, второй вход которого соединен с первым выходом делителя частоты, и систему 29 удаления продуктов эрозии, , второй вход которой связан с выходом второго элемента 2И 27 и вторым входом второго ждущего мультивибратора 26, пассивный модулятор 30, выполненньй в виде диска 31 с приводом 32 и с кольцевой прорезью 33, пересекающей ось корректирующего лазера 4 и имеющей ось вращения параллельную оси последнего, датчик
34положения конца прорези 33, пос-- ле; овательно соединенные, второй блок
35управления скоростью, первый вход которого связан с выходом триггера 12 режима, второй - с датчиком 34 положения конца прорези, а третий - с четвертым выходом делителя 25 частоты, и второй блок 36 ключей, сигнальные входы которого связаны с источником 22 переменного тока, а выходы - с приводом 32 модулятора 30, третий элемент 2И 37, входы которого связаны с выходами блоков 13 и 35 управления скоростью, а выход - с R-входом триггера 14 запрета, последовательно соединенные четвертый ждущий мультивибратор 38, вход которого связан с выходом датчика 34 положения конца прорези, управляе- мьй фазовращатель 39 и цифровой ключ 49, второй сигнальный вход которого соединен с выходом четвертого ждущего мультивибратора 38, а выход - с
1434301 .
ля 25 частоты, счетчика 57 (58), С-вход которого соединен с выходом элемента ЗИ-2ИЛИ 55 .(56) блока 59- ,; (60; сравнения кодов, двух регистров 61 и 62 (63 и 64J, С-входы которых соединены с выходом счетчика 57 (Ь8), а выходы соответственно с первым и вторым входами блока 59 (60)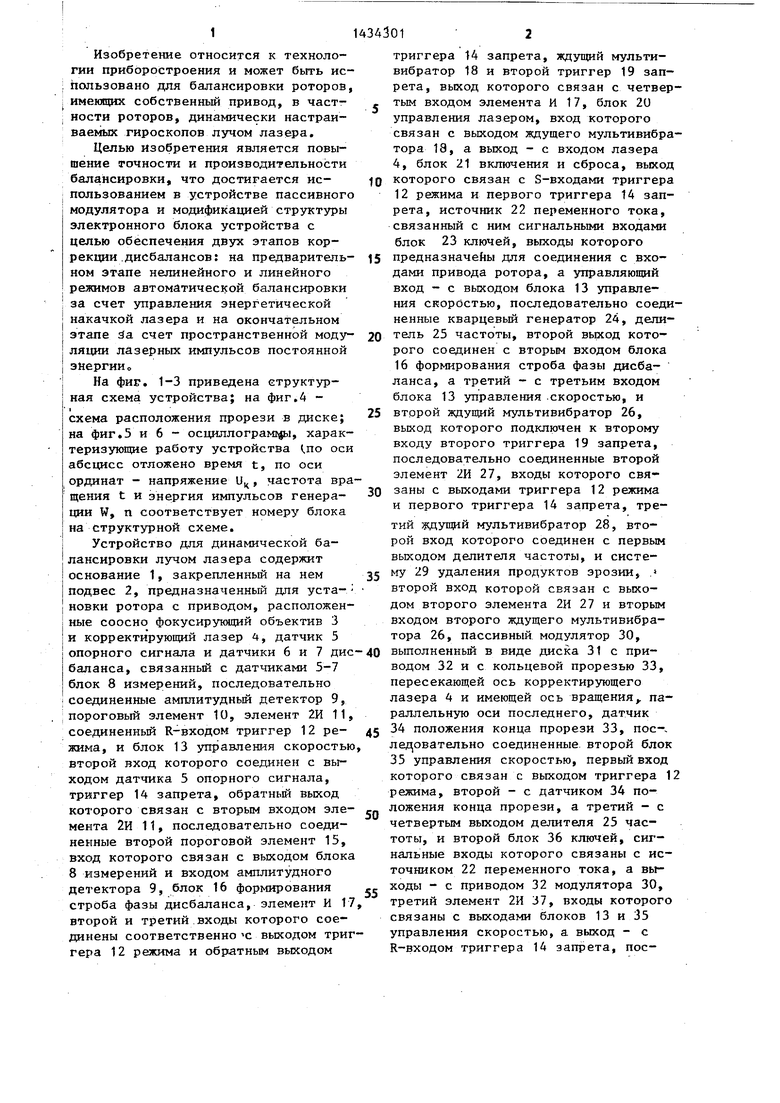
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |
| Устройство для динамической балансировки лучом лазера роторов | 1982 |
|
SU1043499A1 |
| Устройство для динамической балансировки лучом лазера роторов | 1983 |
|
SU1130753A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| ЦИФРОВОЙ ВОЛЬТМЕТР | 1970 |
|
SU277093A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 1994 |
|
RU2054807C1 |
| Измеритель времени установления выходного напряжения цифроаналоговых преобразователей | 1984 |
|
SU1236612A1 |
| Датчик угловых перемещений | 1989 |
|
SU1725069A1 |
Изобретение относится к балансировочной технике Цель изобретения - повышение точности и производительности за счет использования пассивного модулятора и блоков управления скорости, обеспечивающих два этапа коррекции Сигналы с датчиков 5 и 6,7 опорного сигнала и дисбаланса поступают на входы блока 8 измерений, преобразуются и поступают на входы блока 20 управления корректирующим лазером 4 и блоков . 13 и 35 управления скоростью. Блок 13 управления скоростью через блок 23 ключей связан с приводом балансируемого ротора, блок 35 управления скоростью через второй блок 36 ключей - с приводом 32 модулятора 30 6 ил. i С CiO 2 Фаг.1
пятым входом элемента И 17, связан- ю сравнения кодов, распределителя
f5
20
25
30
ные входами с выходом амплитудного етектора 9 второй пороговой элемент 41 и инвертирующий усилитель 42, выод которого подключен к управляющеу входу управляемого фазовращателя 39, и последовательно соединенные сточник 43 опорного напряжения и аналоговый ключ 44, второй сигнальный вход которого связан с выходом амплитудного дете.ктора 9, вьпход - с вторым входом блока 20 управления азером,, управляющий вход - с управяющим входом цифрового ключа 40 и с выходом второго порогового элемента 41, выход стробирования которого соединен с выходом второго элемента 2И 27.
Система 29 удаления продуктов эрозии вьтолнена в виде последовательно соединенных электропневмоклапана 45, предназначенного для соединения с пневмомагистралью 46 высокого давления, камеры 47 с отверстиями 48, . расположенными соосно закрепленному на камере 47 фокусирующему объективу 3 и перпендикулярно оси камеры 47, насоса 49, предназначенного для удаления продуктов эрозии, и блока 50 управления, выход которогр соединен с входом насоса 49о
Блоки 13 и 35 управления скоростью .2) выполнены, каждый в виде двух ополнительных делителей 51 и 52 (53 и 54J частоты, вход первого -из которых связан с третьим (четвертым) выходом делителя 25 частоты и представляет собой третий выход блока 13 (35) управления скоростью, элемента ЗИ-2ИЛИ 55 (Ь6), первый вход которого представляет собой второй вход блока 13 (35) управления ско- ростью, второй и пятый входы соединены с первым вькодом первого дополнительного делителя 51 (53) частоты, а третий, четвертьй и шестой соответственно - с первым и вторым выходами второго дополнительного (четвер.- того) делителя 52 (54) частоты и третьим (четвертым) выходом делите- .
35
40
45
50
0
5
0
5
0
5
0
65 (Ьб) импульсов, второй и третий входы которого соединены мезкду собой и с вторым вькодом дополнительного делителя 51 (52) частоты, первый и четвертый соответственно - с вторым и первым выходами второго дополнительного делителя 52 (54) частоты, а первый и второй выходы соответственно - с V-входами регистров 61 и 62 (.63 и 64) дополнительного элемента 2И 67 (68), выход которого представляет собой выход, а первый вход- первый вход блока 13 (35) управле- ния скоростью, а второй вход соединен с выходом блока 59 60) сравнения кодов, и трех последовательно соединенных ждущих мультивибраторов 69 - 71 1.72-74), вход и выход первого из которых соединен соответственно с первым вькодом дополнительного делителя 51 (52) частоты и пятым входом распределителя 65 (66) импульсов, а выход третьего - с R- входом счетчика 57 1.58,
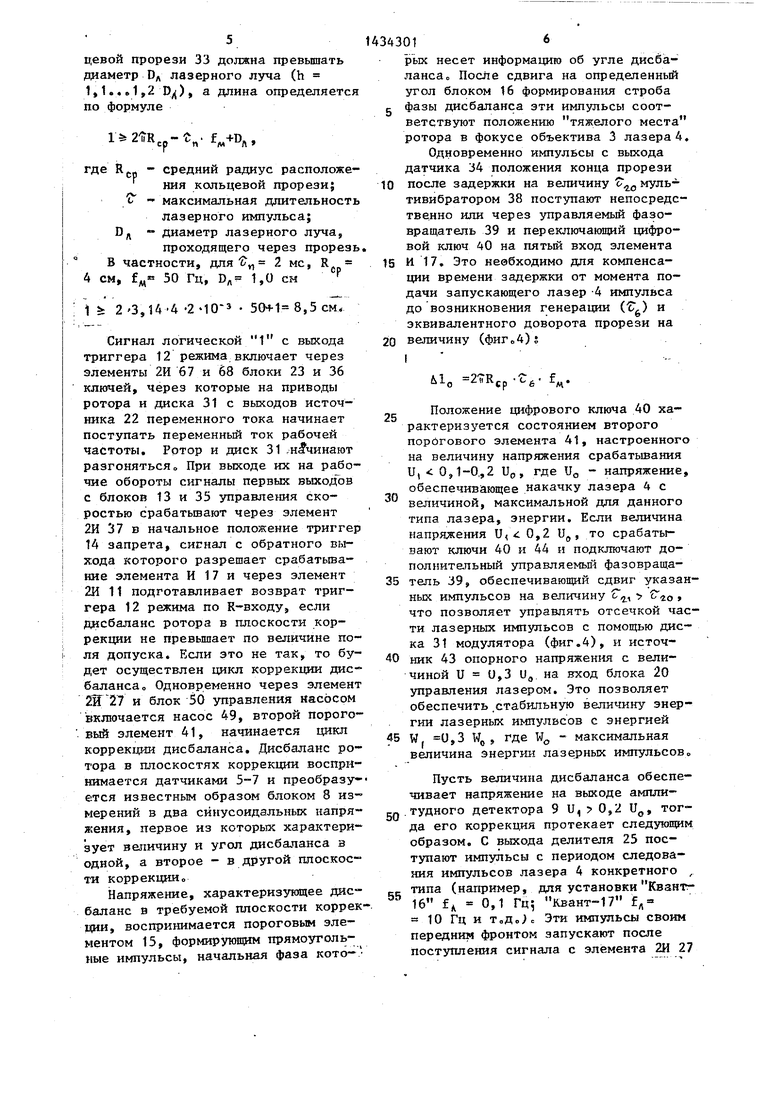
Управляемьш фазовращатель 39 (фиг.З) может быть выполнен, например, в виде последовательно соединенных генератора 75 пилообразного ;напряжения, компаратора 76, управ- ляющий вход которого представляет собой управляющий вход фазовращателя 39 и ждущего мультивибратора 77.
Устройство работает следующим образом
Балансируемый ротор устанавливается на подвес 2 и подключается при- .водом к блоку 23 ключей. Импульс с выхода блока 21 включения и сброса задним фронтом устанавливает триггеры режима 12 и запрета 14 в состояние логической 1. Триггер 14 запрета удерживает от срабатьшания элемент И 17 и триггер 12 режима от срабатывания до разгона ротора и диска 31 модулятора 30 до частоты балансирования. Частота f вращения диска 31 выбирается не кратной частоте fp вращения ротора. Обычно ,25-0, 3fр. При этом ширина кольценой прорези 33 должна превьшать диаметр Од лазерного лзгча (h ..в 1,2 р), а длина определяется по формуле
,р-С„. ,
где RCP - средний радиус расположения кольцевой прорези; - максимальная длительность
лазерного импульса; Вд - диаметр лазерного луча,
проходящего через прорезь
В частности, для &„ 2 мс, R
ср
4 см, „« 50 Гц, Dfl- 1,0 см 1Ь 23,14-4-2 40-5 ,5 см.
Сигнал логической 1 с выхода триггера 12 режима включает через элементы 2И 67 и 68 блоки 23 и 36 ключей, через которые на приводы ротора и диска 31 с выходов источника 22 переменного тока начинает поступать переменный ток рабочей частоты. Ротор и диск 31 .начинают разгоняться„ При выходе их на рабочие обороты сигналы первых выходов с блоков 13 и 35 управления скоростью срабатьшают через элемент 2И 37 в начальное положение триггер 14 запрета, сигнал с обратного выхода которого разрешает срабатывание элемента И 17 и через элемент 2И 11 подготавливает возврат триггера 12 режима по К-входу, если дисбаланс ротора в плоскости коррекции не превышает по величине ио- ля допуска. Если это не так, то будет осуществлен цикл коррекции дисбаланса. Одновременно через элемент 21Г 27 и блок 50 управления насосом включается насос 49, второй порого- вый элемент 41, начинается цикл коррекции дисбаланса. Дисбаланс ротора в плоскостях коррекции воспринимается датчиками 5-7 и преобразуется известным образом блоком 8 измерений в два синусоидальных напря жения, первое из которых характеризует величину и угол дисбаланса в одной, а второе - в другой плоскости коррекции
Напряжение, характериззпощее дисбаланс в требуемой плоскости коррекции, воспринимается пороговым элементом 15, формирующим прямоугольные импульсы, начальная фаза кото-
4343016
рых несет информацию об угле дисбаланса о После сдвига на определенный угол блоком 16 формирования строба g фазы дисбаланса эти импульсы соответствуют положению тяжелого места ротора в фокусе объектива 3 лазера 4,
Одновременно импульсы с выхода датчика 34 положения конца прорези
10 после задержки на величину мультивибратором 38 поступают непосредственно или через управляемьй фазовращатель 39 и переключающий цифро- вой ключ 40 на пятый вход элемента
15 И 17. Это необходимо для компенсации времени задержки от момента подачи запускающего лазер -4 импульса до возникновения генерации ( сГ) и эквивалентного доворота прорези на
20 величину (фиг«4)г
Ll 27Rjp
«
Положение цифрового ключа 40 ха-
рактеризуется состоянием второго порйгоЕого элемента 41, настроенного на величину напряжения срабатывания и, 0,1-0,,2 Up, где UQ - напряжение, обеспечивающее накачку лазера 4 с величиной, максимальной для данного типа лазера, энергии. Если величина напряжения V 0,2 U, то срабатывают ключи 40 и 44 и подключают дополнительный управляемьй фазовраща-
тель 39, обеспечивающий сдвиг указанных импульсов на величину Г, что позволяет управлять отсечкой части лазерных импульсов с помощью диска 31 модулятора (фиг.4), и источник 43 опорного напряжения с величиной и 0,3 Ug на вход блока 20 управления лазером. Это позволяет обеспечить .стабильную величину энергии лазерных импулвсов с энергией
W. 0,3 Wp, где WQ - максимальная величина энергии лазерных импульсов
Пусть величина дисбаланса обеспечивает напряжение на выкоде ампли- тудного детектора 9 U, 0,2 U, тогда его коррекция протекает следующим образом. С выхода делителя 25 поступают импульсы с периодом следования импульсов лазера 4 конкретного , типа (например, для установки Квзнт - 16 f 0,1 Гц Квант-17 frt
10 Гц и т, Эти: импульсы своим передним фронтом запускают после поступления сигнала с элемента 2И 27
первый 26 и второй 28 ждущие мультивибраторы.
Мультивибратор 28 формирует импульс длительностью ZTj , равной времени включения сжатого газа защиты от продуктов эрозии (.обычно-сГ, 0,5- 2 с), а второй мультивибратор 26 - короткий импульс D 0,1 с, создающий временную задержку, необходимую для срабатывания электропневмоклапа на 45 и подачи сжатого газа из магистрали 46, и включающий задним фронтом второй триггер 19 запрета, единичный сигнал на выходе которого разрешает прохождение импульса строба тяжелого места через элемент И 17 о При совпадении во времени строба тяжелого места и строба, характеризующего положение прорези, соответствующее сдвигу ее относительно луча на фазовый угол учитывающий задержку срабатьгоания лазера 4 от момента подачи запускающего импульса), на вьгходе элемента И 17 образуется импульс, который калибруется по длительности ждухдам мультивибратором 18 (,05 мкс) и определяется конструкцией блока 20 управления. Он срабатывает в исходное состояние второй триггер 19 запрета, запрещающий прохождение им- пулЬсов строба тяжелого места на время периода Тд, так как с помощью амплитудного детектора 9 вьщеляется постоянное напряжение, пропорционал ное дисбалансуо Это напряжение управляет через аналоговый ключ 44 и блок 20 управления энергией импульсов лазера 4 (,в качестве блока управления может быть использована система управления СУМ-4 лазера тип Квант, а также являетс я опорным для пороговых элементов 10 и 41, настроенных на амплитуду сбрасывания, пропорциональную остаточному дисбалансу. Стробы тяжелого места ротора с выхода блока 16 формирования строба фазы тяжелого места и датчика 34 (.при условии включения триггера режима 12 и запрета 19 и выключения триггера 14 запрета) ини циируют запуск корректирующего лазера 4 через блок 20 управления. Лазерный импульс производит коррекцию неуравновешенности массы и на поверхности ротора возникает след от воздействия
Продукты эрозии, возникающие при действии луча лазера с материалом
30
ротора, интенсивно всасываются под воздействием сжатого газа, поступающего из пневмомагистрали 46 внутрь камеры 47 через отверстие 48, и от- сасьшаются насосом 49, удаляясь из зоны ротора, что исключает образование облоя на его поверхности. При достижении величиной дисбаланса значе10 ния срабатьшания второго порогового элемента 41 последний сработает и подключит посредством ключей 40 и A l управляемый фазовращатель 39 на вход элемента И 17 и источник 43 опорного
15 напряжения на вход блока 20 управлег ния лазером, В -результате цикл коррекции будет протекать уже импульсами лазера 4 энергией W, const, а их управление пропорционально величине
20 дисбаланса будет осуществляться за счет отсечки хвостового их участка диском 31 модулятора 30. С этой целью сигнал на выходе дополнительно сдвигается управляемым фазовращате25 лем 39 на величину crj; c jg, обеспечивающую проворот прорези до начала генерации, а следовательно, отсечку хвостового участка импульса (фиг.4), Величина задержки ,j; регулируется управляемым фазовращателем обратно пропорционально величине дисбаланса сигналом с усилителя 42 В этом режиме процесс автоматически повторяется до достижения дисбалансом поля допуска из зоны на поверхности ротора, после чего пороговый элемент 10 отключает триггер 12 режима, прекращается подача питающего напряжения на приводы ротора модулятора 30 и отключается насос 49. Ротор и модулятор 30 останавливаются, ротор поворачивают и балансируют в другой плоскости,
процессы подстройки частоты вращения ротора и диска 31 модулятора 30 при балансировке протекают следующим образом.
При работе блока 13 (35)после- довательность импульсов стабильной частоты с выхода кварцевого генератора 24 делится делителями 25,51 и 52 (,25, 53 и 54) частоты соответственно первым до частоты опорного сигнала f и частоты fp(f) балансировки, вторым - до частоты f, 0,05 Гц и третьш; - до частоты f 0,25 Гц, Указанные напряжения и импульсы с выхода датчика 5 (34) опорного сигнала ротора (модулятора)
35
40
45
50
55
коммутируются элементом ЗИ-2ИЛИ 55 (56) в последовательность пачек им- пульсов длительностью каждая 1 с частотой следования f, содержащих четные импупьсы частотой заполнения а нечетные - частотой за1,) , которые несут текущем fp( и за- значениях частоты вращения. Эти импульсы записываются с счетчиком 58 (59), предварительно сбрасываемым в нулевое положение импульсами частоты f, с выхода ждущего мультивибратора 7Н74). Параллельные коды, соответствующие заданfp,(.
полнения информацию о
данном J.p5.д,
ной
) и текущей . частотам вращения, последовательно за- письшаются регистрами 61 и 62 (63 и 64) выходов распределителя 65 (66) импульсов, причем последний вьдает импульсы (частотой f,), сдвинутые друг относительно друга на половину периода. Это необходимо для того, чтобы записьшать в регистре 61 (63) код, соответствующий заданной частоте вращения, а в регистре 62 (64) - текущей частоте, вращения. Коды выходов регистров Ы и 62 (63 и 64) сравниваются блоком 59 (60) сравнения кодов так, что сигнал на его выходе равен логической 1 при и логическому О, если наоборот. Этот сигнал через третий элемент 2И 67 (68) и блок 23 (.36) ключей управляет скоростью вращения ротора (модулятора), а также первым перепадом отключает триггер 14 запрета.
Формула изобрете ни я
Устройство для динамической балансировки роторов лучом лазера, содержащее основание, Закрепленный на нем подвес, предназначеиньй для - установки ротора с приводом, расположенные соосно фокусирующий объекти и корректирующий лазер, датчик опорного сигнала, датчики дисбаланса, связанный с датчиками блок измерений последовательно соединенные амплитудный детектор, пороговый элемент, элемент 2И, соединенный R-входом Т1шггер режима, и блок управления скоростью, второй вход которого сое- динен с выходом датчика опорного сигнала, триггер запрета, обратный выход которого связан с вторым вхо0
5
0
5
0
5
0
5 « е
дом элемента 2И, последовательно соединенные второй пороговый элемент, вход которого связан с выходом блока измерений и входом амплитудного детектора, блок формирования строба фазы дисбаланса, элемент И, второй и третий входы которого соединены соответственно с выходом триггера режима и обратным выходом триггера запрета, ждущий мультивибратор и второй триггер запрета, выход которого связан с четвертым входом элемента И, блок управления лазером, вход которого связан с выходом ждущего мультивибратора, а выход - с входом лазера, блок включения и сброса, выход которого связан с S-входами триггера режима и первого триггера запрета, источник переменного тока, связанный с ним
сигнальными входами блок ключей, выходы которого предназначены для соединения с входами привода ротора, а упрагвляющий вход - с выходом блока управления скоростью, последовательно соединенные кварцевый генератор, -делитель частоты, второй выход которого соединен с вторым входом блока формирования строба фазы дисбаланса, а третий - с третьим входом блока управления скоростью, и второй ждэт15 й мультивибратор, выход которого подключен к второму входу второго триггера запретами последовательно соединенные второй элемент 2И, входы которого связаны с выходами триггера режима и первого триггера запрета, третий ждущий мультивибратор, второй вход которого соединен с первым выходом делителя частоты, и систему удаления продуктов эрозии, второй вход которой связан с выходом второго элемента 2И и вторым входом второго ждущего мультивибратора, отличающе- е с я тем, что, с целью повышения точности и производительности балансировки, оно снабжено пассивным модулятором, вьтолненным в виде диска с приводом и с кольцевой прорезью, пересекающей ось корректирующего лазера и имеющего ось вращения, параллельную оси последнего, датчиком положения конца прорези, последовательно соединенными вторым блоком управления скоростью, первьй вход которого связан с выходом триггера режима, второй - с датчиком положе- .
II
ния конца прорези, а третий - с четвертым выходом делителя частоты, и вторым блоком ключей, сигнальные входы которого связаны с источником переменного тока, а выходы - с приводом модулятора, третьим элементом 2И, входы которого связаны с выходами блоков управления скоростью, а выход - с R-выходом триггера запрета, последовательно соединенными четвертым ждущим мультивибратором, вход которого связан с выходом датчика положения конца прорези, управ ляемым фазовращателем, и цифровым ключом, второй сигнальнь1й вход кото рого соединен с выходом четвертого ждущего мулвтивибратора, а выход
3430112
с пятым входом элемента И, связанными входами с выходом амплитудного детектора вторым пороговым элементом и инвертирукщим усилителем, выход которого подключен к управляйте- му входу управляемого фазовращдте- ля,-и последовательно соединенными источником опорного напряжения и аналоговым ключом, второй сигналь-. ный вход которого связан с выходом амплитудного детектора, выход - с вторым входом блока управления лазером, управляющий вход - с управляющим входом цифрового ключа и с выходом второго порогового элемента, выход стробирования которого соединен с выходом второго элемента 2И.
10
15
Фи.г
Фив.З
и
1(: ж агждагр:
%
Фиг.
Тп
Kie.5
i f I I I I I I и
LLLIU
II
.,
, pt, I |t
l|l| Mill I III II IIIIII I Mil .t
III1,1llIIIII
II 111 11
11101
fl
ж
Ji-I
I I I
I, ,1 II
fe
ЦII
tfilyiГ|Л ррплои .
II I II .ll
TpфФ nhПГИи,
иuIill 11
BfrlП Пni ni t
--IT II I
11
I ll ll -11 , % ILWe { , II W const W €onsi
W ж ж: ж JtJC
ЖДЖУ1и1Д л
I I I и
I { I I I I h I
IIIIIIM
11
01
fl
ж
II и
I I I
, ,1 II
tfc
II
ррплои .
II
9и,г.6
| Суминов В.М., Баранов П.Н | |||
| Разработка и исследование полуавтоматической лазерной балансировочной установки | |||
| СЪЕМНЫЙ ПРЕДОХРАНИТЕЛЬ ПЛАТЬЯ | 1922 |
|
SU617A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
