I
Изобретение относится к железнодорожной измерительной технике, в част ности к устройствам для определения положения железнодорожного пути в плане и профиле на его горизонталь- ных прямолииейньк участках.
Цель изобретения - повышение точности определения положения железнодорожного пути а плане и профиле.
На фиг.1 показана б Ьк-схема устройства; на.фиг.2 - фсема работы устройс ва; на фиг.З - схема к определению влияния колебаний шасси на измерение положения, пути.
Устройство для определения поло- жения железнодорожного пути в плане и профиле на его горизонтальных прямолинейных участках содержит шасси 1 на котором смонтированы датчик 2 пройденного пути и датчики 3 для из- мерени я положения рельсовых нитей, в плане или профиле определяемого расстоянием ЕЙ(х) в нескольких ее точках от шасси 1, которое является базой отсчета. В качестве датчика 3 могут быть использованы фотодатчикк, электромагнитные датчики и механические контактные датчики существу- ющих путеизмерительных устройств. Выходы датчиков 3 подключены к вхо- дам преобразователей 4 указанных расстояний Сп(х) в электрические напряжения Uj , выходь которых электрически соединены с сумматором 5 для преобразования напряжений про- порционально фуикщог стрелы рельсовой нити в промежуточных точках измерения. Выход сумматора 5 подключен к входу преобразователя 6 Лапласа, который соединен с преобразова- телем 7 напряжений. Выход преобразователя 7 соединен с входом инвертора 8 Лапласа, выходы которого соединены с входами регистрирующего блока 9 и дифференцирующего блока 10. Выход блока 10 подключен к входу регистрирующего блока 1i, который.имеет цифровую или графичес кую регистрацию характеристик положения пути в плане и профиле.
Устройство работает следующим образом.
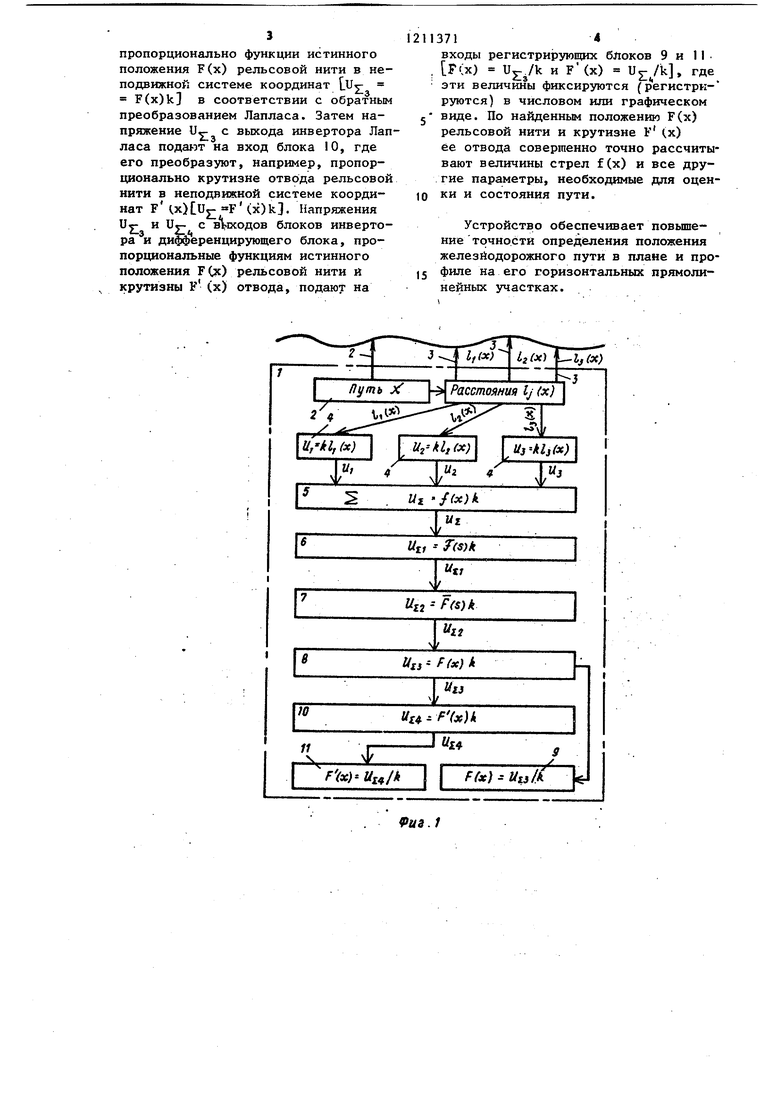
При перемещении по контролируемому участку пути базы отсчета - щас- си 1 датчики 3 измеряют расстояния нескольких точек, чаще всего трех, рельсовой нити от базы отсчета, находят три ординаты € .х) , f и)
71 2
и ЕЗ(Х) рельсовой нити относительно подвижной базы отсчета - шасси 1 (см. фиг.2 и 3) , в функции пройденного пути X. Последний измеряют датчиком 2 пройденного пути одним из известных способов. Далее (фиг.1) преобразователи 4 преобразуют указанные величины ординат в напряжения Uj kfi (х) (здесь и далее k - коэффициент преобразования механических величин в электрической цепи). Напряжение Uj подают в сумматор 5 и преобразуют пропорционально функции стрелы рельсовой нити в средних точках измерения в соответствии с соотношением
Uj. kf(x)k{E4(x)-()-4aEs(x)- + b, (x)J}(1)
где a - расстояние между первым и вторым датчиками для измерения положения пути в плане или профиле;
Ь- расстояние между вторым и третьим датчиками для измерения положения пути в плане или профиле; 1,Р7.Ез расстояиия от рельсовой нити до базы измерения-шасси в зонах установки на нем датчиков для измерения положения в пути в плане или профиле (фиг.2) .
Далее напряжение Uj; с выхода сумматора 5, пропорциональное значению измеряемой стрелы (х) рельсовой нити, подают на вход преобразователя 6 Лапласа, где получают его интегральное отображение по Лапласу f (s)k в соответствии с соотношением
f(s)«(s)(a+br Lai4s) +bF(s)(2)
где F(S)- изображение искомой функции положения рельсовой нити;
S - комплексная переменная функции Лапласа.
После этого напряжение U,- с выхода преобразователя Лапласа подают на вход преобразователя 7 на- ряжения, где это напряжение преобразуют в напряжение U . F(s)k, ропорциональное изображ ию функции F(8) положения рельсовой нити в соответств.ии с соотношением
F(s)-f(s)e-«5-U-t-b) (ае- + +Ь)Г (3)
алее напряжение U с выхода преобразователя 7 подают на вход инвер- roga 8 Лапласа, где его преобразуют
пропорционально функции истинного положения F(x) рельсовой нити в неподвижной системе координат LUj; F(x)k в соответствии с обратным преобразованием Лапласа. Затем напряжение и с выхода инвертора Лапласа nop,at-) r на вход блока 10, где его преобразуют, например, пропорционально крутизне отвода рельсовой нити в неподвижной системе координат F u)Uj- F (x)k3. Напряжения U-- и Uy- с в -кодов блоков инвертора и дифференцирующего блока, пропорциональные функциям истинного положения FСх) рельсовой нити и крутизны F (х) отвода, подают на
11371
входы регистрирующих блоков 9 и 1I , Р(х) Uj-7k и F (X) Uj-yk. где эти величины фиксируются (регистр :- руются) в числовом или графическом , виде. По найденным положению F(x) рельсовой иити и крутизие F (х) ее отвода совершенно точно рассчитывают величины стрел f(х) и все другие параметры, необходимые для оцен- )0 ки и состояния пути.
Устройство обеспечивает повышение точности определения положения железйодорожного пути в плане и про- (5 филе на его горизонтальных прямолинейных участках.
J-jg/nvwM для измеоемуя положения пути
РеаьсоЬая нить
Фиг. 2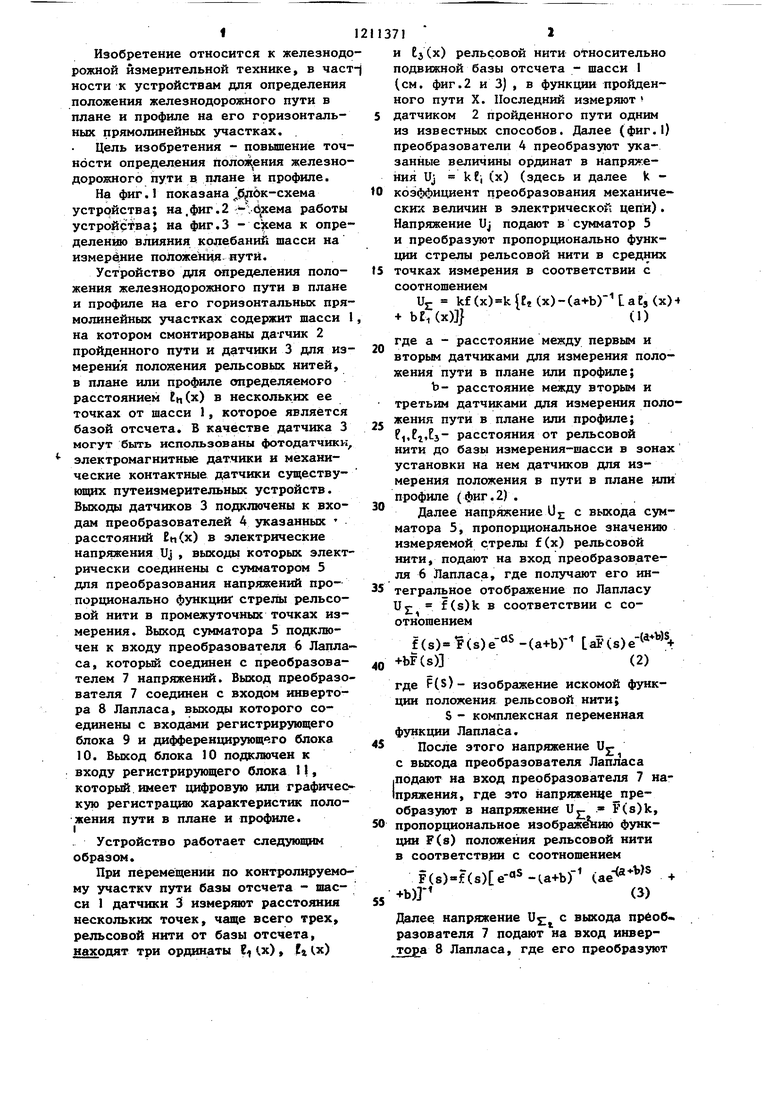
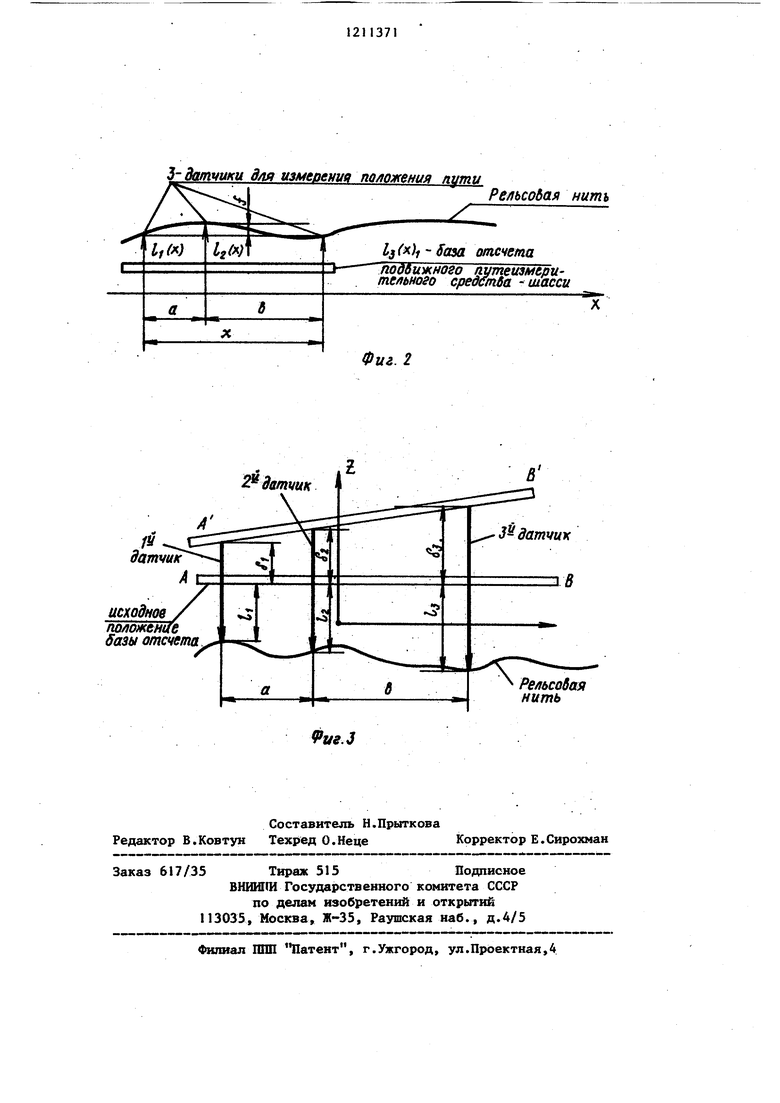
2 3emvaK
/ - датчик
исходное положение базы отсчета
Реаьсобая нить
Фиг.З
Составитель Н.Прыткова Редактор В.Ковтун Техред О.Неце Корректор Е.Сирохман
617/35 Тираж 515Подписное
ВИИИКИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ППП Патент, г.Ужгород, ул.Проектная,4
| Соломонов С.А | |||
| Путевые машины | |||
| М.: Транспорт, 1977, с.300-311 |
