Известные масштабно-дистанционные фотокопировальные системы содержат датчик линейного и углового рассогласования между действительным и требуемым положениями чертежа (или шаблона) с фотоэлектрической головкой, синусно- косинусный потенциометр обмена скоростей, который питается от источника неизменного напряжения, вращается нулевым серводвигателем и служит для разложения скорости копирования на составляющие продольной и поперечной подач, электродвигатели продольной (синусной) и поперечной (косинусной) подач командоаппарата, несущего чертеж (или щаблон), электромеханическую схему управления этими двигателями, преобразующую выходной сигнал датчика, и синхронный электрический вал между каждым из указанных двигателей и соответствующим двигателем копировального инструмента.
Масщтабно-дистанционные фотокопировальные системы с магнитной коммутацией либо с квадрантным переключателем обмена скоростей не обеспечивают необходимой точности копирования при повыщепных скоростях.
В описываемой системе этот недостаток устранен тем, что оптическая ось фотоголовки расположена с регулируемым эксцентриситетом относительно оси поворота датчика, выход которого «подключен к нулевой диагонали синусно-косинусного потенциометра обмена скоростей, а электродвигатели каждой из подач копировального инструмента и командоаппарата, соединенные электрическим валом, включены в цепь обратной связи между синусно-косинусным потенциометром обмена скоростей и командоаппаратом.
oNo 121164
Для повышения равномерности копирования при различных наклонах линии чертежа в предлагаемой системе может быть нрименен дополнительный синусно-косинусный потенциометр обмена скоростей, в основную диагональ которого введено напряжение рассогласования.
Для повышения надежности трогания электродвигателей подач при рассогласованиях, близких к нулю, в синусно-косннусном потенциометре намотка сопротивления может иметь повышенную неравномерность.
Синхронный вал может быть оборудован двигателями постоянного тока для повышения динамических и статических свойств вала при больших скоростях и ускорениях. В цепь нуль-электродвигателя может быть последовательно включен дроссель, что обеспечит снижение ошибок при копировании на углах. Наконец, оптическая ось фотоголовки может быть дополнительно сдвинута перпендикулярно направлению движения на величину радиуса инструмента для коррекции искажений, вносимых радиусом инструмента.
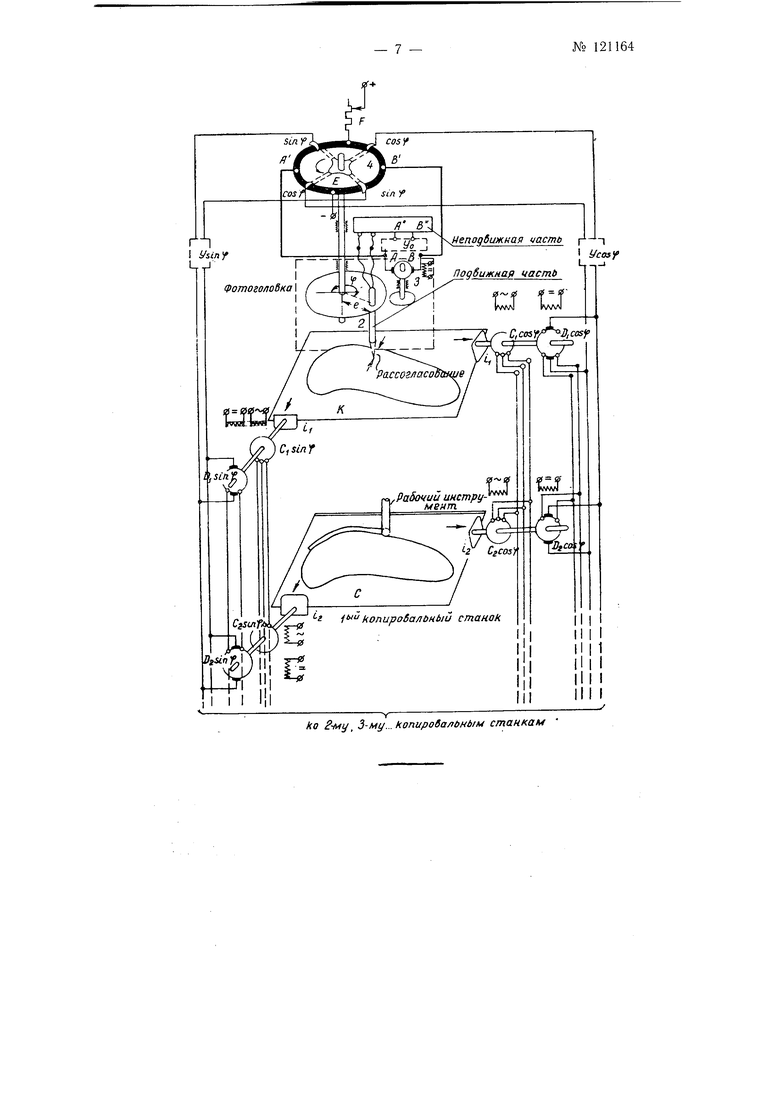
На чертеже изображена схема описываемой системы. Система состоит из следующих элементов.
1.Измеритель рассогласования между линией шаблона / и средним положением подвижной части измерителя 2. Измеритель является полярным датчиком линейного рассогласования, замеряющим смещение линии шаблона от среднего положения подвижной части измерителя в перпенднкулярном к ней направлении.
2.Измеритель угла (приближенного) между направлением скорости и некоторым начальным направлением. В данной системе измеритель 2 поворачивается нулевым серводвигателем 3 вокруг оси с некоторым опережением (эксцентриситетом 2). Так как электродвигатель питается от этого же измерителя рассогласования, то при отклонении линии измеритель поворачивается серводвигателем вслед за ней. Это поворачивающееся устройство является механическим измерителем (приближенным) угла движения системы. Это же эксцентриситетное устройство используется для стабилизации копировального движения системы посредством изменения величины эксцентриситета и вместе с тем изменения скорости нарастания и затухания сигнала от рассогласования, а также дает возможность вносить сигнал с некоторым опережением.
3.Устройство, разлагающее скорость перемешения на составляющие - поперечную и продольную, - для привода поперечной и продольной подач, обеспечивающих результирующую скорость по линии чертежа (шаблона).
В описываемой системе применен потенциометр 4 из двух ветвей сопротивлений для обмена скоростей, изменяющихся по синусному закону так, что в точках А и.В синус равен нулю, в точке F - положительному максимуму и в точке Е - отрицательному максимуму. К точкам F и Е прикладывается регулируемое напряжение постоянного тока. Для уменьшения влияний трения и других факторов, мешаюших электродвигателю тронуться вблизи его нуля, первая ступень сопротивления у нуля (в точках А и В ) выполнена скачком с тем, чтобы двигатель трогался при малых отклонениях напряжения от нуля . Для повышения точности копирования к точкам А и В потенциометра необходимо подключить
напряжение с выхода измерителя рассогласования АВ (провода ЛЛ и ВВ ). Это создает возможность воздействия напряжения с выхода измерителя рассогласования (практически безынерционного звена) непосредственно на двигатели подач (помимо звена нуль-электродвигатель с механизмом поворота головки измерителя 2 и потенциометра обмена скоростей 4).
При этом величина поперечной составляющей скорости копирования (от тиратронов) отклоняется от синусного закона и при углах между направлением скорости и начальным направлением в 45, 135, 225 и 315° уменьшается в два с лишним раза, но зато у нулей напряжений на электродвигателе, где система обычно дает наибольшие искажения, напряжение будет полным. Для улучшения действия поперечной составляюшей скорости копирования (от тиратронов) можно синусный закон распределения скоростей изменить на прямолинейную зависимость, хотя это приведет к колебаниям скорости на . Скачок сопротивления у нуля при этом нужно сохранить.
Для постоянства условий действия поперечной составляюш.ей при сохранении неизменной скорости необходимо применять сдвоенный потенциометр обмена скоростей (на чертеже не ноказан), в котором нейтральные точки первого потенциометра А и В и аналогичные точки второго потенциометра соединяются между собою на каледом потенциометре и между обоими потенциометрами. К первому потенциометру в двух точках подключается постоянный ток (регулируемый), а ко второму в соответствующих точках подключается выход тиратронного блока. Затем косинусный вывод первого потенциометра и синусный вывод второго потенциометра (сдвинутый на +90°) выводятся через усилитель к косинусной подаче. Точно так же синусный вывод первого и косинусный (сдвинутый на -|-90°) вывод второго потенциометра выводятся к синусной подаче через усилитель.
4.Синхронный вал, передающий электрическим путем на расстояние синхронно скорость исполнительных двигателей копировального станка на двигатели командоаппарата, связывая относительные движения фотоголовки и копирующего инструмента. Ввиду большого диапазона скоростей и ускорений при сравнительно малой допустимой ошибке вал может быть выполнен с сельсинами Cismcp, С23Шф и CiCos9, СгСОЗф и с двигателями DiSin9, О251Пф и Dicos9, Вгсозф с кольцами Шенфера; в этом случае при малых скоростях (около нуля) основную нагрузку тянут сельсины, при больших скоростях и больших ускорениях основную нагрузку тянут двигатели с кольцами Шенфера. Такой вал обеспечивает возможность наибольших ускорений и скоростей. Вал может иметь одни сельсины - тогда он будет слабее. Наконец, у вала могут быть только двигатели с кольцами Шенфера - такой вал может применяться при наличии скачка напряження у нуля для результирующего напряжения.
5.Командоаппарат К и копировальный станок С (с изделием). Каждое из этих устройств обеспечивает две взаимно перпендикулярные системы подач - стола с шаблоном относительно фотоголовки (или фотоголовки относительно стола) и стола с изделием относительно рабочего инструмента (или наоборот) - от двух электродвигателей через редучторы.
Движение стола комаидоаппарата или стола с изделием может происходить по плоской, цилиидрической или щаровой поверхности и опре- 3 -№ 121161
№ 121164- 4 -
деляется двумя составляющими, перемещение по каждой из которых обеспечивается своим электродвигателем.
Для создания масштаба редукторы от электродвигателей к подачам на копировальном станке и командоаппарате выбираются с разным передаточным числом i.
Масштаб М определяется по формуле:
Ж , i.j
где /1 - передаточное число редуктора станка;
/2 - передаточное число редуктора командоаппарата.
Масштабно-дистанционная фотокопировальная система работает следующим образом.
Над копируемой линией чертежа либо шаблона, прикрепленного к столу командоанпарата, расположен фотоэлектрический узел измерителя рассогласования, поворачиваемый с некоторым опережением (так как поворот происходит вокруг оси, расположенной немного позади) вслед за линией чертежа нуль-электродвигателем, который питается ог этого,же измерителя рассогласования. Направление движения, обусловливаемого этим поворотом, на каждом участке копирования приближается к направлению линии чертежа .Так как при этом одновременно новорачивается рукоятка потенциометра обмена скоростей 4, то два двигателя подач, подключенные к нему, обеспечат относительное неремешение инструмента и фотоголовки в этом же направлении. Одновременность относительного перемещения рабочего инструмента и фотоголовки обусловлена тем, что их поперечные и продольные подачи связаны электрическими валами. Это обеспечивает копировальное движение инструмента по чертежу на онределенном расстоянии (благодаря электрическому валу) и в определенном масштабе (благодаря различным передаточным числам в редукторах нодач командоаннарата и копировального станка). Можно вести работу от одного командоаппарата но одному чертежу несколькими копировальными станками. Для этого соответствующие двигатели подач копировальных станков должны быть подключены параллельно соответствующим проводам синхронного вала (показанным на чертеже пунктиром, внизу). Для повышения точности копирования подключается непосредственная (гальваническая) связь измерителя рассогласования с потенциометром обмена скоростей (провода АА и ВВ ), которая уменьшает постоянную времени отработки ошибки системой, так как она действует, помимо звена механического (поворота фотоголовки и потенциометра), посредством нуль-электродвигателя.
В схеме на чертеже предусмотрены усилители (главным образом, мощности) Ysincp и Усозф для уменьшения габаритов реостата, включенного потенциометром обмена скоростей, и YO для уменьшения габаритов тиратронного блока, а также для повышения чувствительности нулевого звена. Усилители , Усозф и YO могут быть амплидинами, магнитными усилителями, усилителями на германиевых триодах и др. Так как все эти усилители работают на электродвигатели (либо муфты скольжения), то для получения наибольшей точности и скорости необходимо установить лир1ейную зависимость между управляющим напряжением и выходными оборотами. Такая зависимость может быть получена обратной связью через тахогенераторы. Однако более эффективно, поскольку
постоянная времени обмотки тахогенератора выпадает, деформировать характеристику усилителя перед электродвигателем, создав скачок напряжения у нуля для компенсации остановки электродвигателя с учетом силы трения при трогании в исполнительном механизме, дефоомации характеристики у нуля при дальнейшем выпрямлении и других отклонений от линейности внешней характеристики двигателя.
При применении полярного усилителя, собранного из двух магнитных усилителей, включенных по дифференциальной схеме, скачок быть создан соответствующим подбором характеристики магнитного усилителя, у которого должен иметь место резкий подъем характеристики у перехода подмагничивания из отрицательной к положитаньной области, а затем перегиб характеристики. Аналогичная форма характеристики у германиевых триодов (или обычных электронных ламп), включенных по пушпульной схеме, создает такой же скачок на выходе у нуля усилителя. Устранить значительную часть влияния трения у нульэлектродвигателя можно (особенно в малых электродвигателях) введением в цепь двигателя небольшого напряжения (порядка 8 в) переменного тока либо неполным сглаживанием в подводимом токе переменной составляющей. Для повыщения точности и стабильности работы датчик рассогласования целесообразно строить на фазоимпульсном принципе с дифференциальной схемой включения тиратронов. При этом на выходе образуются постоянная и переменная составляющие.
При использовании электромагнитного усилителя (ЭМУ) для питания электродвигателей скачок у нуля можно осуществить выпрямителями с эталонной э.д.с. в схеме со сбросом в обоих направлениях до обмотки управлепия ЭМУ. Включение ЭМУ для уменьшения петли гистерезиса и снижения инерционности следует проводить но схеме с последовательно включенной отрицательной обратной связью по напряжению.
В цепь нулевого серводвигателя иногда целесообразно последовательно включить дроссель: для уменьшения ошибок на углах за счет выноса, так как инерционность фотоголовки увеличивается, что сказывается в затягивании поворота; для одновременного увеличения напряжения на втором потенциометре обмена скоростей в точках, аналогичных А и В , из-за уменьшения посадки напряжения нуль-электродвигателем; для снижения перерегулирований нуль-электродвигателя на углах и снижения излишней чувствительности у нуля напряжения. Включения дросселя не требуется, когда на прямой линии система копирует ряд зигзагов, вызываемых небольшими отклонениями линии чертежа.
Для уменьщения инерции нулевого звена целесообразно включение конденсаторного электродвигателя с преобразователем напряжения рассогласования в пропорциональный ему переменный ток, опрокидывающий фазу при изменении знака рассогласования.
В ряде случаев центр инструмента должен проходить линию копирования эквидистантно для учета и коррекции искажения, вносимого радиусом инструлмгнта. В этом случае для малых радиусов, не превышающих опереткения, можно допускать сдвиг центра измерителя рассогласования перпендикулярно направлению движения на величину радиуса инструмента с тем, чтобы отдалить траекторию центра инструмента, тогда край инструмента обработает лист по чертежу.
Этот метод связан со снижением устойчивости системы и пригоден для инструментов с небольшими радиусами. При больщих инструмента можно рекомендовать перенос центра измерителя рассогласования в сторону посредством закрепления его на дополнительной зубчатке, поворачиваемой холостой зубчаткой. Чтобы не изменять конструкции фотоголовки, рабочий инструмент может быть закреплен на
№ 121164
№ 121164
приспособлении, повертываемом элекгродвигателем, имеющим синхронный вал с иуль-электродВИгателем (центр инструмента должен быть отнесен в сторону на величину радиуса инструмента).
Предмет изобретения
1.Масштабно-дистанционная фотокопировальная система, содержащая датчик линейного и углового рассогласования между действительным и требуемым положениями чертежа (или шаблона )с фотоэлектрической головкой, синусно-косинусный потенциометр обмена скоростей, который питается от источника неизменного напряжения, вращается нулевым серводвигателем и служит для разложения скорости копирования на составляюшие продольной и поперечной подач, электродвигатели продольной (синусной) и поперечной (косинусной) подач командоаппарата, несущего чертеж (или шаблон), электромеханическую схему управления этими двигателями, преобразующую выходной сигнал датчика, и синхронный электрический вал между каждым из указанных двигателей и соответствующим двигателем копировального инструмента, отличающаяся тем, что, с делью повышения точности копирования при повышенных скоростях, оптическая ось фотоголовки расположена с регулируемым эксцентриситетом по отношению к оси поворота датчика, выход которого подключен к нулевой диагонали синусно-косинусного потенциометра обмена скоростей, а электродвигатели каждой из подач копировального инструмента и командоаппарата, соединенные электрическим валом, включены в цепь обратной связи между синусно-косинусным потенциометром обмена скоростей и командоаппаратом.
2.Система по п. 1, отличающаяся тем, что, с целью повышения равномерности копирования ири различных наклонах линии черте жа, применен дополнительный синусио-косинусный потенциометр обмена скоростей, в основную диагональ которого введено цапряжение рассогласования, причем все зажимы нулевых диагоналей обоих потенциомегров соединены накоротко, а цепи управления двигателями синусной (косинусной) подачи питаются соответственно от синусного (косинусного, движка основного потенциометра и косинусного (синусного) движка дополнительного потенциометра.
3.Система по п. 1, отличающаяся тем, что, с целью обеспечения надежного трогания электродвигателей подач при рассогласованиях, близких к нулю, в синусно-косинусном потенциометре с обеих сторон нулевого положения намотка сопротивления имеет повышенную неравномерность для создания двух дополнительных скачков напряжения.
4- Система по п. 1, отличающаяся тем, что, с целью повышения динамических и статических свойств синхронного вала ири больших скоростях и ускорениях, этот вал содержит, кроме сельсинов, также двигатели постоянного тока с обмоткой, выведенной на кольца, при помощи которых эти двигатели электрически соединены между собой.
5.Система по п. 1, отличающаяся тем, что, с целью снижения ощибок при копировании на углах, в цепь нулевого электродвигателя последовательно включен дроссель.
6.Система по п. 1, отличающаяся тем, что, с цельюкоррекции искажений, вносимых радиусом инструмента, величина которого не превыщает в приведенном масштабе эксцентриситета оптической оси фотоголовки, эта ось дополнительно сдвинута перпендикулярно направлению движения на величину радиуса инструмента в соответствующем масштабе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для получения вращающейся световой точки, например для фотоэлектрических копировальных головок | 1953 |
|
SU101287A2 |
| И. М. Э. Г. Моторов, А. С. Федотов, А. М. Федоров, А. С. Еи Г. Н. Петров | 1970 |
|
SU259606A1 |
| Фотокопировальная система | 1974 |
|
SU484067A1 |
| МАСШТАБНАЯ ФОТОКОПИРОВАЛЬНАЯ СИСТЕМА | 1970 |
|
SU267316A1 |
| Фотокопировальное устройство для управления станком | 1978 |
|
SU750436A1 |
| ФОТОКОПИРОВАЛЬНАЯ ДВУХКАНАЛЬНАЯ СИСТЕМАУПРАВЛЕНИЯ | 1969 |
|
SU253543A1 |
| Фотокопировальная система | 1974 |
|
SU497124A1 |
| Самонастраивающийся двухканальныйпРиВОд | 1976 |
|
SU813354A1 |
| Самонастраивающаяся фотокопировальная система | 1969 |
|
SU327753A1 |
| ФОТОКОПИРОВАЛЬНАЯ СИСТЕМА | 1970 |
|
SU279325A1 |