(54) САМОНАСТРАНВАЮЩИЙСЯ ДВУХКАНАЛЬНЫЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный привод | 1977 |
|
SU632986A1 |
| Двухканальный привод | 1975 |
|
SU581454A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Фотокопировальная система управле-Ния | 1978 |
|
SU813368A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Бинарная система управления | 1984 |
|
SU1140095A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКИМ ОГНЕМ ПО ДВИЖУЩИМСЯ ЦЕЛЯМ | 1997 |
|
RU2134892C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПСИХОФИЗИОЛОГИЧЕСКОГО СОСТОЯНИЯ ЧЕЛОВЕКА | 2001 |
|
RU2214166C2 |
| Двухканальная система регулирования скорости | 1980 |
|
SU900256A1 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
1
Изобретение относится к фотокопировальным системам, обеспечивающим автоматическое прослеживание плоских кривых.
Известна двухканальная система, содержащая фотоголовку, синусно-косинусный распределитель скоростей, усилители и координатные приводы, применяемая для газовой резки. В данной системе нагрузка на валах координатных приводов при обходе копируемого контура практически не меняется, так как нет силового .взаимодействия межд рабочим органом и деталью 1,
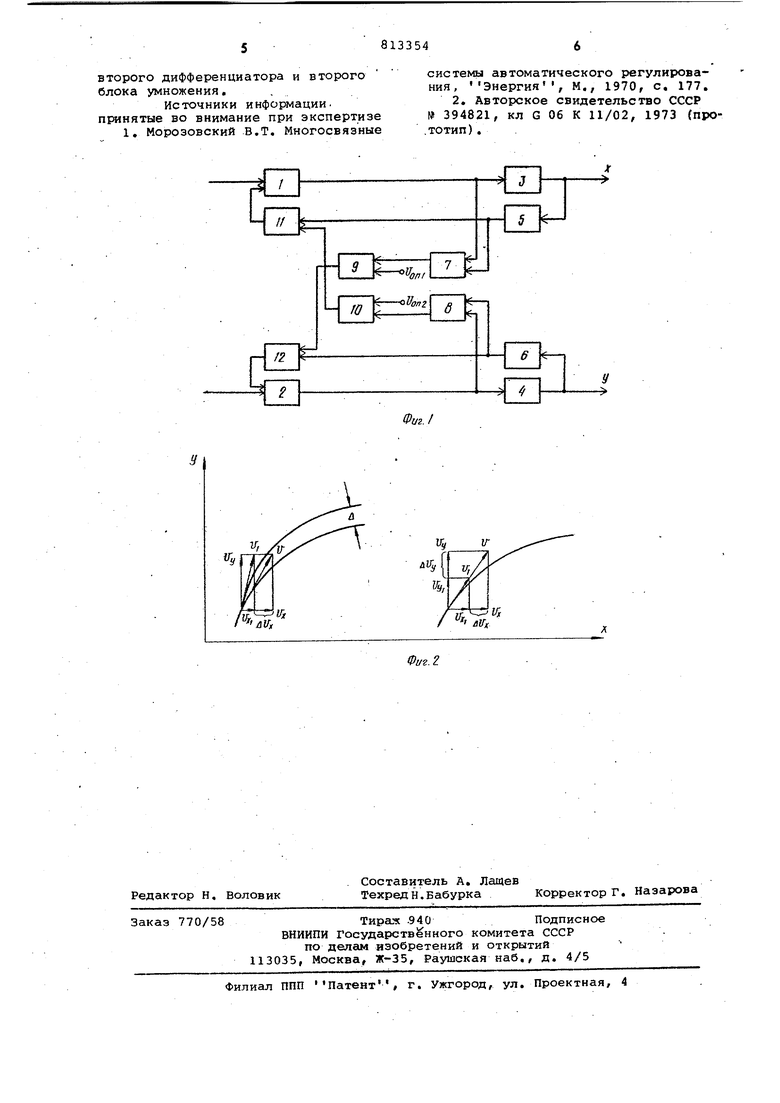
Недостатком данной системы при использовании их на металлорежущих стаках является возникновение ошибок прослеживания вследствие изменения нагрузки на валах двигателей, зависящих от профиля и режима обработки детали, что приводит к нарушению распределителя скоростей. В результате этого, несмотря на правильное распределение управляющих воздействий, подаваемых на входы приводов, результирующий вектор скорости изменяет свое направление.(Фиг.2) и центр копирования смещается с линии чертежа на параллельную траекторию, отстоящую от линии на величину & , при которой новое установившееся распределение управляющих воздействий компенсирует возникшее изменение скорости одного из приводов.
Наиболее близким к предлагаемому является устройство для фотоследящего копирования чертежей, содержащее последовательно соединенные первый усилитель, первый двигатель, первьлй
0 дифференциатор, первый блок сравнения и первый сумматор и последовательно соединенные второй усилитель, второй двигатель, второй блок сравнения и второй сумматор, -выход первого
5 усилителя соединен со вторым входом первого блока сравнения, а выход второго усилителя соединен со вторым входом второго блока сравнения 12.
Недостатком данного привода является его малая точность.
Цель изобретения - повышение точности привода.
Поставленная цель достигается тем, что привод содержит первый и второй 5 блок умножения, выходы которых подсоединены ко вторым входам соответственно первого и второго усилителей, первый и второй входы первого блока умножения соединены соответственно с выходами первого дифференйатора и второго сумматора, а перый и второй входы второго блока ум ожения соединены соответственно с ыходами второго дифференциатора и торого блока умножения.
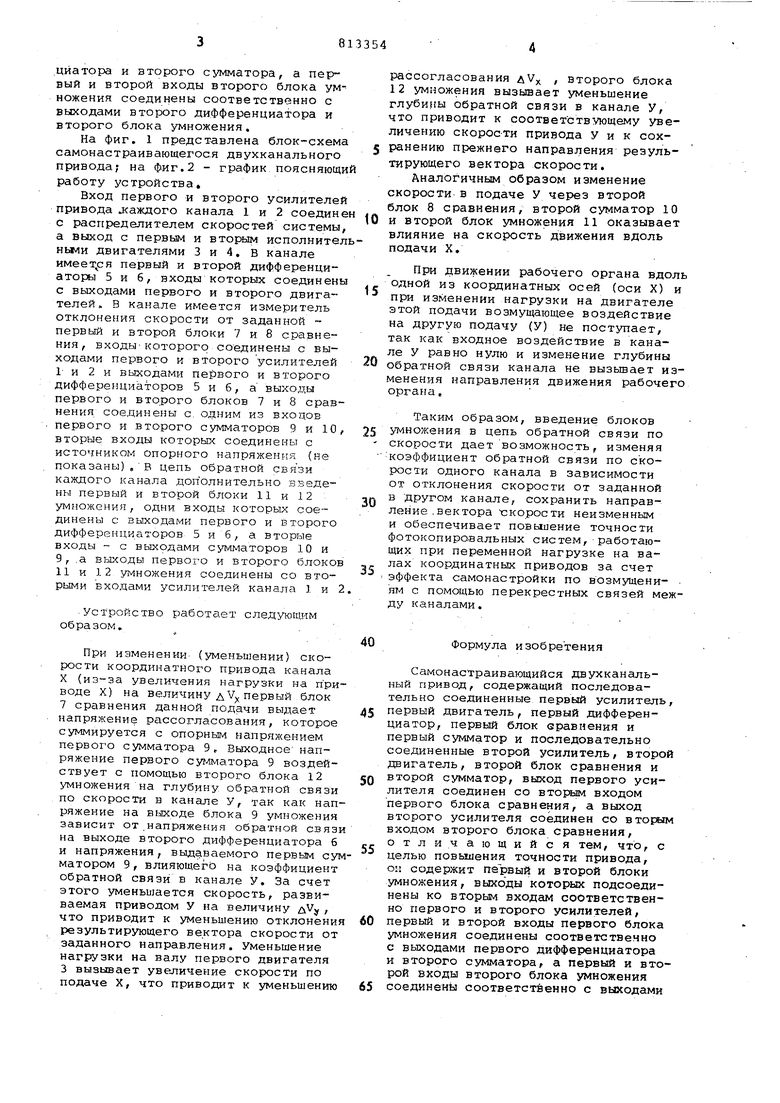
На фиг. 1 представлена блок-схема амонастраивающегося двухканального ривода; на фиг.2 - график поясняющий работу устройства.
Вход первого и второго усилителей привода л аждого канала 1 и 2 соединен с распределителем скоростей системы, а выход с первым и вторым исполнительными двигателями 3 и 4, в канале имеет я первый и второй дифференциаторы 5 и б, входы которых соединены с выходами первого и второго двигателей, В канале имеется измеритель отклонения скорости от заданной первый и второй блоки 7 и 8 сравнения, входы-которого соединены с выходами первого к второго усилителей и 2 и выходами первого и второго дифференциаторов 5 и 6, а выходы первого и второго блоков 7 и 8 сравнения соединены с. одним из входов первого и второго сумматоров 9 и 10, вторые входы которых соединены с источником опорного напряжения (не показаны). В цепь обратной связи каждого канала дополнительно введены первый и второй блоки 11 и 12 умножения, одни входы которых соединены с выходами первого и второго дифференциаторов 5 и б, а вторые входы - с выходами сумматоров 10 и 9,.а выходы первого и второго блоков 11 и 12 умножения соединены со вторыми входами усилителей канала 1 и 2.
Устройство работает следующим образом.
При изменении (уменьшении) скорости координатного привода канала X (из-за увеличения нагрузки на приводе X) на величину дУ, первый блок 7 сравнения данной подачи выдает напряжение рассогласования, которое суммируется с опорным напряжением первого сумматора 9, Выходное напряжение первого суглматора 9 воздействует с помощью второго блока 12 умножения на глубину обратной связи по скорости в канале У, так как напряжение на в лходе блока 9 умножения зависит от .напряжения обратной связи на выходе второго дифференциатора б и напряжения, выдаваемого первым сумматором 9, влияющегЬ на коэффициент обратной связи в канале У. За счет этого уменьшается скорость, развиваемая приводом У на величину дУ, что приводит к уменьшению отклонения результирующего вектора скорости от заданного направления. Уменьшение нагрузки на валу первого двигателя 3 вызывает увеличение скорости по подаче X, что приводит к уменьшению
рассогласования дУ , второго блока 12 умножения вызывает уменьшение глубины обратной связи в канале У, что приводит к соответствующему увеличению скорости привода У и к сох5 ранению прежнего направления результирующего вектора скорости.
Аналогичным образом изменение скорости в подаче У через второй блок 8 сравнения, второй сумматор 10 10 и второй блок умножения 11 оказывает влияние на скорость движения вдоль подачи X.
При движении рабочего органа вдоль одной из координатных осей (оси X) и при изменении нагрузки на двигателе этой подачи возмущающее воздействие на другую подачу (У) не поступает, так как входное воздействие в канале У равно нулю и изменение глубины 0 обратной связи канала не вызывает изменения направления движения рабочего органа.
Таким образом, введение блоков 5 умножения в цепь обратной связи по - скорости дает возможность, изменяя коэффициент обратной связи по скорости одного канала в зависимости от отклонения скорости от заданной ., в другом канале, сохранить направление .вектора х;корости неизменным и обеспечивает повыиение точности фотокопировальных систем, работающих при переменной нагрузке на валах координатных приводов за счет эффекта самонастройки по возмущени- ям с помощью перекрестных связей между каналами.
Формула изобретения
Самонастраивающийся двухканальный привод, содержащий последовательно соединенные первый усилитель,
первый двигатель, первый дифференциатор, первый блок сравнения и первый сумматор и последовательно соединенные второй усилитель, второй двигатель, второй блок сравнения и
второй сумматор, выход первого усилителя соединен со вторым входом первого блока сравнения, а выход второго усилителя соединен со вторым входом второго блока сравнения, отличающийся тем, что, с
целью повьшения точности привода, ом содержит и второй блоки умножения, выходы которых подсоединены ко вторым входам соответственно первого и второго усилителей,
первый и второй входы первого блока умножения соединены соответственно с выходами первого дифференциатора и второго сумматора, а первый и второй входы второго блока умножения
соединены соответственно с выходами
второго дифференциатора и второго блока умножения. .
Источники информации. принятые во внимание при экспертизе 1. Мороэовский В,Т. Многосвязные
системы автоматического регулирования, Энергия, М., 1970, с. 177,
1Г„ гг
лгсг
