Изобретение относится к устройствам бесконтактного измерения параметров движения и может быть использовано, в частности, в системах наземной навигации для определения координат подвижных объектов.
Цель изобретения - повьшение точности измерения и быстродействия устройства.
На фиг. 1 -7 гхр едставлены ,блок-схемы устройства и его узлов; иа фиг«8 - анализирующая оптическая маска, инвариантная к вращению, в виде кольцевой маски.
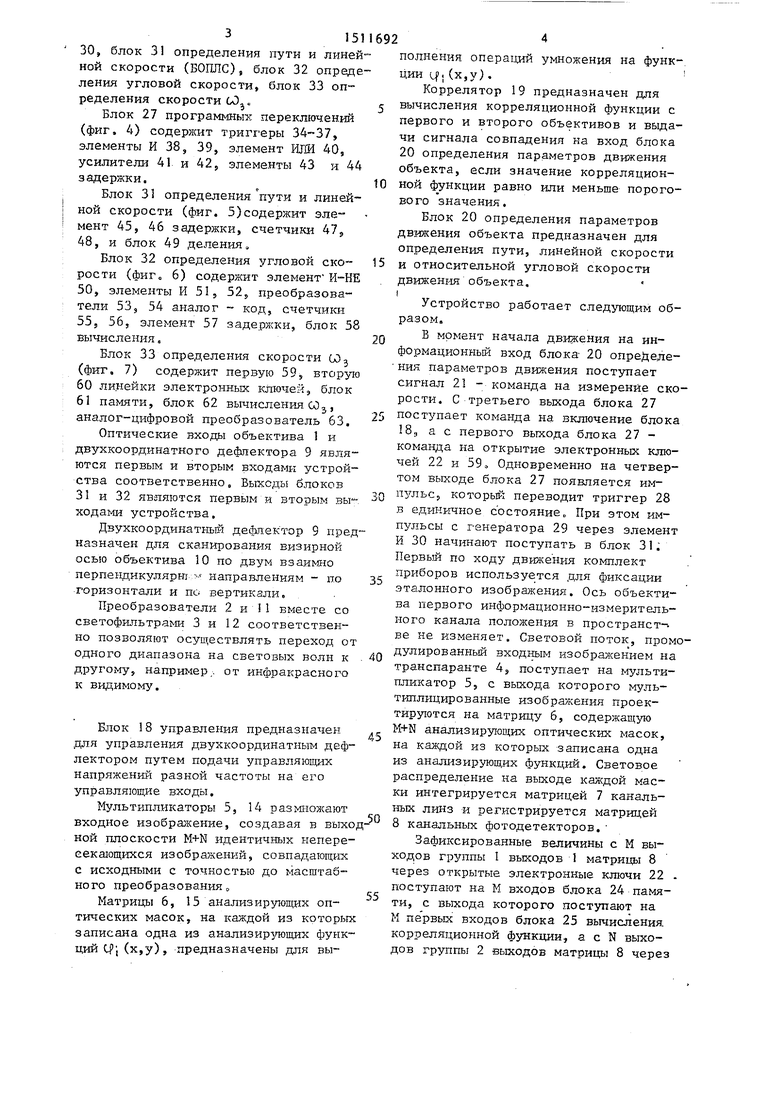
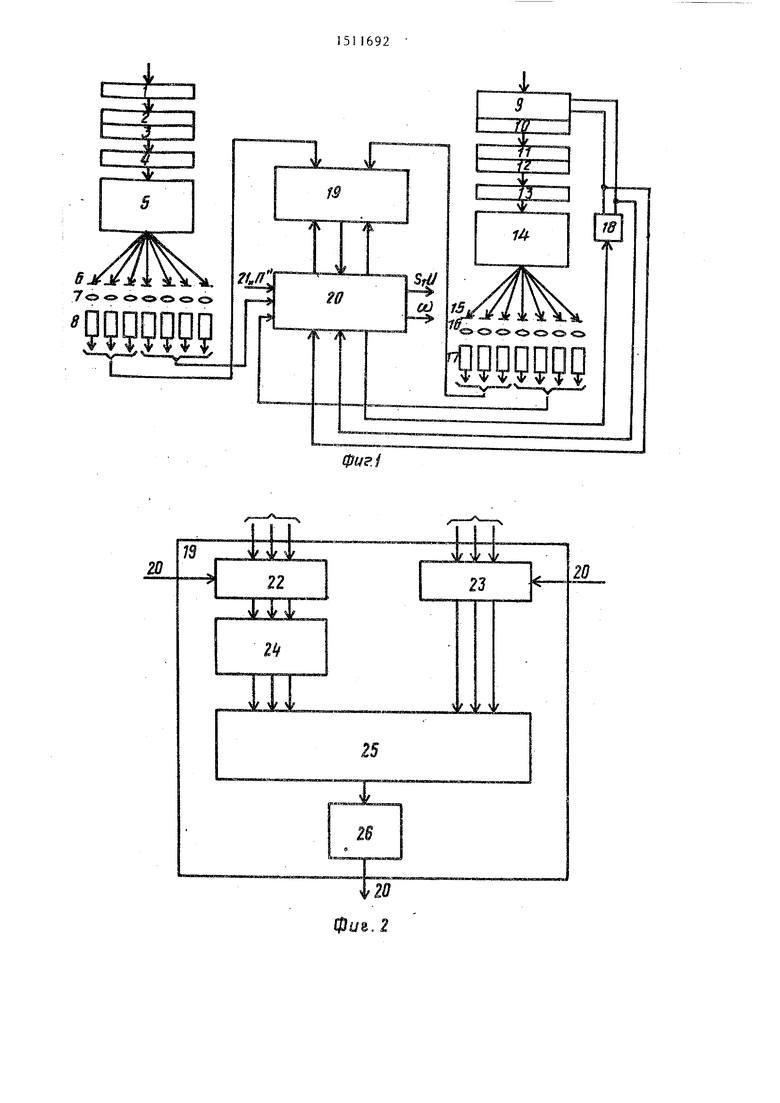
Устройство содержит (фиг. 1) объектив 1, преобразователь 2, светофильтр 3, транспарант 4, мультипликатор 5, матрицу 6 анализирующих оптических масок, матрицу 7 канальных ЛИНЗ и матрицу 8 канальных фотодетекторов, двухкоординатный дефлектор 9, объектив 10, преобразователь 11, светофильтр 2, транспарант 13, мультипликатор 14, матрицу 15 анализирующих оптических масок, матрицу 16 канальных линз, матрицу 17 канальных фотодетекторов, блок 18 управления, коррелятор 19 к блок 20 определения параметров движения, на кото- рьй поступает сигнал 21
Коррелятор 19 (фиг. 2) содержит первую 22 и вторую 23 линейки электронных ключей, блок 24 памяти, блок 25 вычисления корреляционной функции, схему 26 сравнения„
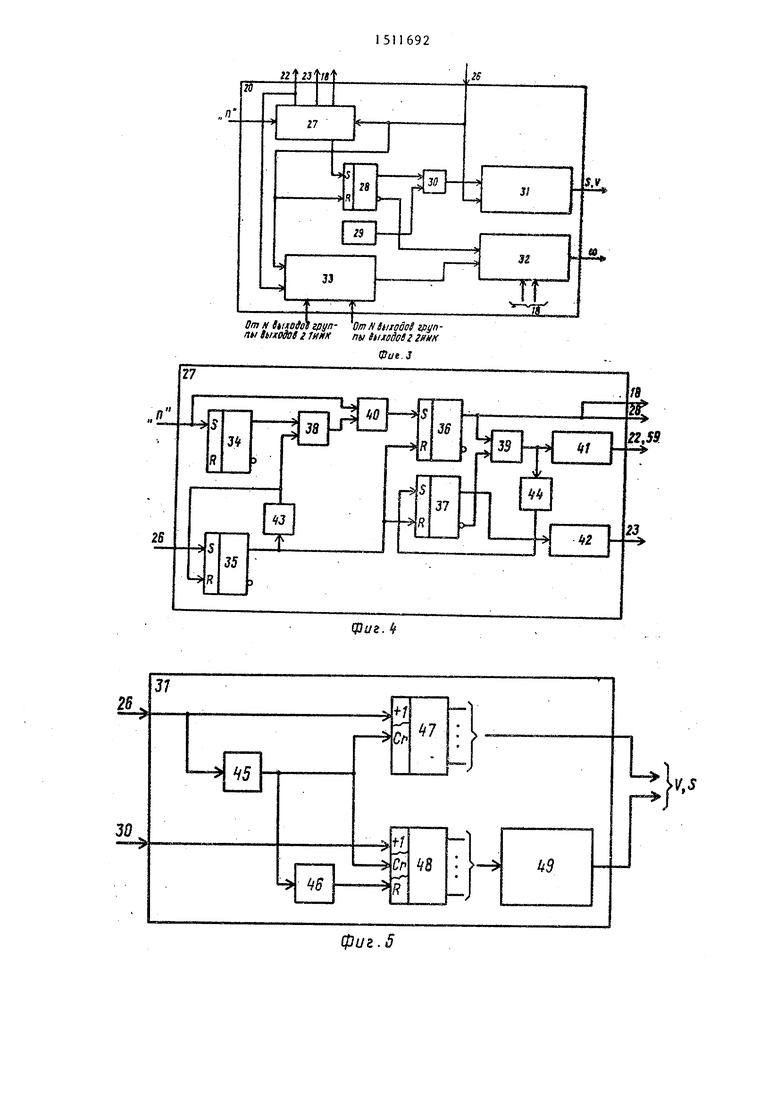
Блок 20 определения параметров движения объекта (фиг. 3) содержит блок 27 программньгх переключений (ВПП), триггер 28, генератор 29 тактовых импульсов (ГТИ), элемент И
сл
О)
со
tsp
3151
30, блок 31 определения пути и линей™ ной скорости (БОПЛС), блок 32 определения угловой скорости, блок 33 определения скорости СО,.
Блок 27 программных переключений (фиг. 4) содержит триггеры , элементы И 38, 39, элемент РШИ 40, усилители 41 и 42, элементы 43 и 44 задержки.
Блок 31 определения пути и линейной скорости (фиг. 5)содержит элемент 45, 46 задержки, счетчики 47, 48, и блок 49 деления«
Блок 32 определения угловой ско рости (фиго 6) содержит элемент И-НЕ 50, элементы И 51, 52 преобразовз тели 53, 54 аналог - код, счетчики 55, 56, элемент 57 задержки, блок 58 вычисления.
Блок 33 определения скорости Wj (фиг, 7) содержит первую 59, вторую
60линейки электронных ключей, блок
61памяти, блок 62 вычисления СО, аналог-цифровой преобразователь 63.
Оптические входы объектива 1 и двухкоординатного дефлектора 9 являются первым и вторым входами устройства соответственно. Выходы блоков 31 и 32 являются первым и вторым . ходаг ш устройства.
Двухкоординатный де1|)лектор 9 предназначен для сканирования визирной осью объектива 10 по двум взаимно перпендикулярш - направлениям - по горизонтали и по вертикали.
Преобразователи 2 и 11 вместе со светофильтрами 3 и 12 соответственно позволяют осуществлять переход от одного диапазона на световых волн к другому, например,, от инфракрасного к видимому.
Блок 18 управления предназначен ,цля управления двухкоординатным дефлектором путем подачи управляющих напряжений разной частоты на его управляющие входы.
Мультипликаторы 5, 14 размножают входное изобра кение, создавая в выхоной плоскости M+N идентичных непере- секшощихся изображений, совпадающих с исходивши с точностью до масштабного преобразования о
Матрицы 6, 15 анализирующих оптических масок, на каждой из которых записана одна из анапизир пощих функций (х,у), предназначены для выполнения операций умножения на функции (jf, (х,у).
Коррелятор 19 предназначен для вычисления корреляционной функции с первого и второго объективов и вьща- чи сигнала совпадения на вход блока 20 определения параметров движения объекта, если значение корреляционной функции равно или меньше порогового значения.
Блок 20 определения параметров движения объекта предназначен для определения пути, линейной скорости и относительной угловой скорости движешет объекта, I
Устройство работает следующим образом.
В момент начала движения на ин- формационньй вход блока- 20 опреДеле- НИН параметров движения поступает сигнал 21 - команда на измерение скорости. С третьего выхода блока 27 поступает команда на включение блока IBg ас первого выхода блока 27 - команда на открытие электронных ключей 22 и 59 Одновременно на четвертом выходе блока 27 появляется импульс, которьй переводит триггер 28 в единичное состояние При этом импульсы с генератора 29 через элемент И 30 начинают поступать в блок 31. Первый по ходу движения комплект приборов используется для фиксации эталонного изображения. Ось объектива первого информационно-измерительного канала положения в пространст-т. ве не изменяет. Световой поток, пром дулированньш входным изобралсением на транспаранте 4, поступает на мультипликатор 5, с выхода которого мультиплицированные изображения проектируются на матрицу 6, содержащую M+N анализирующих оптических масок, на каждой из которых записана одна из анализирующих функций. Световое распределение на выходе каждой маски интегрируется матрицей 7 канальных линз и регистрируется матрицей 8 канальных фотодетекторов.
Зафиксированные величины с М выходов группы I выходов 1 матрищ) 8 через открытые электронные ключи 22 поступают на М входов блока 24 памяти, с выхода которого поступают на М первых входов блока 25 вычисления корреляционной функции, а с N выходов группы 2 вьтодов матрицы 8 через
515
открытые электронные ключи 59 поступают на N входов блока 61 памяти, с выхода которого поступают на N первы входов блока 62 вычисленияcOj. Далее по командам с выходов блока 27 закрываются электронные ключи 22 к 59 и открываются электронные ключи 23. Пр этом на М вторые входы коррелятора 19 с М выходов группы 1 выходов матрицы 17 канальных фотодетекторов поступает проанализированное оптическими масками 15 изображение от второго по ходу движения объективао Визирная ось этого объектива изменяет свое положение в пространстве в двух взаимно перпендикулярных направлениях за счет работы двухкоординат- ного дефлектора 9, управляемого напряжениями с первого и второго выходов блока 18, причем сканирование визирной осью по вертикали осуществляется с частотой, в несколько раз большей, чем частота сканирования визирной осью по горизонтали. Сканирование визирной осью объектива необходимо в связи с тем, что объект испытывает бортовую качку и поворачивается в соответствии с дорожными условиями, это приводит к изменению ракурса изображения. Объект также совершает колебания относительно поперечной оси, это приводит к вращению изображения в поле апертуры объектива, что значительно ухудшает точность работы устройства. Для компенсации влияния этих колебаний спектральное разложение изображений проводят с помощью М анализирующих оптических масок, инвариантных к вращению.
Проанализированное матрицей анализирующих оптических масок 15 изображение с М выходов группы 1 выходов второго информационно-измерительного канала через открытые электронные ключи 23 поступает на М вторые входы блока 25 вычисления корреляционной функции, в котором происходит вычисление корреляционной функции двух множеств, состоящих из К величин, полученных при спектральном разложении изображений с первого и второго ин- фо рмационно-из мерительных кан ало в. Вычисленное значение корреляционной функции поступает в схему 26 сравнения с пороговым значением. Если вычисленное значение равно или меньше порогового значения, то во входную
26
апертуру второго объектива попало изображение, зафиксированное в блоках 24, 61 памяти. Со схемы 26 сравнения подается сигнал на вход установки в нуль триггера 28, на второй вход блока 31 и на открытие электронных ключей 60, Триггер 28 перебрасывается и, тем самьа, прекращается поступление импульсов с генератора 29 в блок 31. Одновременно по сигналу с инверсного выхода триггера 28 блок 32 фиксирует напряжения с выходов блока 18. Через открытые электронные
ключи 60 коэффициенты спектрального разложения с К выходов группы 2 выходов второго информационно-измерительного канала поступают на N вторые входы блока 62 вычисления СО „.
Количество ш-шульсов, поступивших в блок 3I, пропорционально линейной скорости объекта. Зафиксированные напряжения с выходов блока 18 пропорциональны повороту объекта относительно верттсальной оси и углу наклона объекта относительно продольной оси. Значение угла поворота объекта относительно поперечной оси вычисляется в блоке 33. Из этой информации в блоке 32 определения угловой скорости вычисляется относительная угловая скорость объекта.
Выбирая соответствующие светофильтры 3, 12 и транспаранты 4, 13, мож-
но регистрировать изображения в широком диапазоне видимого и инфракрасного спектра, т.е. измерительное устройство может работать при любом освещении и разных метеорологических
условиях.
Блок 27 программных переключений может быть реализован следующим образом.
Информационным сигналом дпя блока
27 программных переключений является команда 21 оператора - Пуск. По команде 21 Пуск на вход установки в единицу триггера 34 подается ре- . лейньш сигнал, которьй переводит
триггер 34 в единичное состояние и поступает на вход элемента ИЛИ 40. Сигнал с элемента ИЛИ 40 устанавливает триггер 36 в единичное состояние, сигнал с прямого выхода которого поступает на блок 18, на вход установки в единичное состояние трих- гера 28 и через элемент И 39, усилитель 4 открывает электронные ключи 22 59. Сигнал с элемента И 39 также
запускает элемент 44 задержки, котоый настраивается на время записи в блоки 24, 61 памяти величин разложения входного изображения. По истече- г пик времени записи элемент 44 задержки выдает сигнал на единичный вход триггера 37, которьй закрывает элемент И 39 и тем самьм обесточивает усилитель 41 и закрьшает электронные о 1СПГОЧИ 22, 59, и прямой выход которого через усилитель 52 открывает электронные к.гаочи 23,
В результате корреляционного сравнения сигнал со схемы 26 сравнения . |5 поступает на единичньй вход триггера 35 и переводит его в единичное состояйие. Сигнал с прямого выхода триггера 35 поступает на входы установки в нуль триггеров 36, 37 и на 20 элемент 43 задержки. При этом триггер
36 переходит в нулевое состояние и снимает сигнал с единичного входа триггера 28, триггер 37 переходит в нулевое состояние, последний через
усилитель 42 закрывает электронные ключи 23. Элемент 43 задержки настраивается на время, достаточное для
переключения триггеров Зб, 37. По истечении времени задержки элемент 43 30 задержки выдает сигнал на перевод триггера 35 в нулевое состояние и сигнал на элемент И 38, по сигнапу с которого начитается новый цикл рабо25
ты устройства.
Блок 32 работает следуюа им образом.
Напряжение с первого и второго выходов блока 18 управления, пропорциональные угловым скоростям объекта по вертикальной (со,) и продольной (COj) осям, поступшот на входы преобразователей 53, 54 аналог код. После преобразования импульсы, itponop- хщональные угловым скоростям, через открытые элементы ТЛ 51,- 52 поступают на счетчики 55, 56. Элементы И 51, 52 открыты за счет сигнала; который постзшает с выхода элемента И--НЕ 50, вход которого связан с инверсным выходом триггера 28, По сигналу с инверсного выхода триггера 28 информация из счетчиков 55, 56 поотстает в блок 58 вычисления, в который, татсже поступает значение угловой скорости объекта относительно поперечной оси (CJj) из .блока 33. Блок 58 вычисляет
относительную угловую скорость по формуле
СО + co .
0
0
5
5
0
5
0
5
Сигнал с инверсного выхода триггера 28 тающее поступает на элемент 57 задержки. Время задержки выбирается необходимым для вычисления блоком 58 угловой скорости СО, По истечении времени задержки сигнал с выхода элемента 57 задержки приводит в нулевое состояние счетчики 55, 56, в исходное состояние блок 58, и блок 32 определения угловой скорости готов к oвo- му циклу вычислений.
Блок 3 определения пути и линейной скорости работает следующим образом.,
С выхода элемента И 30 импульсы от генератора 29 тактовых импульсов постзгаают на вход записи счетчика 48. В результате корреляционного сравнения в корреляторе 19 сигнал со схемы 26 поступает на вход записи счетчика 47. В счетчике 47 записывается импульс, соответствующий пройденному пути, равному 1 м, так как пройденный путь S можно определить как S N &S, где N - количество импульсов, AS - шаг о В устройстве шаг US выбирается из условия м, где L - расстояние между объективами устрой- . ства, Сигнал со схемы 26 через элемент 45 задержки, настроенный на необходимое для срабатьшания триггера 28, поступает на входы счи - тывания счетчиков 47, 48. При .этом с выхода счетчика.47 снимается информация о пройденном пути S, ас ; выхода счетчика 48 - информация о времени прохождения объектом расстояния равного Mj, выражаемого ,через число импульсов п. Так как и , где Т - время; f - частота ГТИ, то количество импульсов п со счетчика 48 поступает на блок 49 деления f на п и на выходе блока 49 имеем информацию о линейной скорости объекта V. Сигнал с выхода элемента 45 задержки также поступает на элемент 46 задержки, на- строённьй на время, необходимое для - вычисления скорости V и по истечении которого сигнал с элемента.46 задержки обнуляет счетчик 48. Формула изобретения I, Устройство для измерения параметров движения объекта, содержащее
два информационно-измерительных канала, коррелятор и блок определения параметров движения, первый информационно-измерительный канал состоит из последовательно установленных на одной оптической оси объектива, преобразователя оптического изображения, светофильтра, транспаранта, мультипликатора, матрицы N анализиру ющих оптических масок, матрицы N канальных линз, матрицы N канальных фотодетекторов, второй информацион- но-измерительньй канал состоит из блока управления и последовательно установленных на одной оптической ОСИ двухкоординатного дефлектора, .объектива преобразователя оптического изображения, светофильтра, транспаранта, мультипликатора, матрицы N анализирующих оптических масок, матрицы N канальных линз, матрицы Ы канальных фотодетекторов, блок определения параметров движения выполнен из блока программных переключений, первьй которого соединен с первым входом триггера, прямой выход которого и выход генератора тактовых импульсов соединены с входами элемента И, выход которого подключен к пер- входу блока определения пути и линейной скорости, инверсньй выход триггера подключен к первому входу блока определения угловой скорости, три других выхода блока программных переключений соединены с тремя выходами блока определения параметров движения, два входа которьпс соедине- .ны с двумя входами блока определения угловой скорости, а третий вход соединен с входами блока программных переключений, вторым входом триггера и вторым входом блока определения пути и линейной скорости, первьй и второй выходы блока управления соеди- йены с первым и вторым входами двухкоординатного дефлектора и с первым
5
0
. Q 5
5
0
5
0
и вторым входами блока определения параметров движения соответственно, выход коррелятора соединен с третьим входом блока определения параметров движения, первый второй выходы которого соединены 4 первым и вторым выходами коррелятора, третий выход блока определения параметрюр движения соединен с входом блока управления, отлича-ющееся тем, что, с целью повьшения быстродействия и точности измерений, в него введены в каж- дай информационно-измерительный канал матрица М анализирующих оптичес- ких масок, инвариантных к вращению, матрица М каральных линз, матрица М канальных фотодетекторов, входы матриц М анализирующих оптических масок, инвариантных к вращению, оптически соединены с выходами соответствующих мультипликаторов, выходы матрицы М канальных фотодетекторов соединены ; соответственно с первой и второй группаьш входов коррелятора, выходы матриц N канальных фотодетекторов первого и второго информационно-измерительного каналов соединены соответственно с первой и второй группой информационных входов блока определения параметров движения.
2. Устройство по п. I, отличающееся там, что в блок определения параметров движения объекта введен блок определения скорости объекта относительно поперечной оси, первая и вторая rpjrnna входов, третий и четвертый -входы которого соединены соответственно с первой и второй группами кн юрмационных входов, с третьим входом блока определения параметров движешш и с первым выходом блока программных переключений, а выход блока определения скорости объекта относите,пьно поперечной оси подключен к четвертому входу блока определения угловой скорости.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров движения объекта | 1987 |
|
SU1422160A1 |
| Устройство для измерения параметров движения объекта | 1990 |
|
SU1704093A1 |
| СПОСОБ СТЕГАНОГРАФИЧЕСКОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ ЧЕРЕЗ ГЛАВНЫЙ ОПТИЧЕСКИЙ ТРАКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2496239C1 |
| СИСТЕМА АНАЛИЗА ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1984 |
|
SU1840694A1 |
| Оптический корреляционный координатор | 1973 |
|
SU443396A1 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
| ЦИФРОВОЙ КОРРЕЛЯТОР | 1991 |
|
RU2051413C1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2011 |
|
RU2452092C1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 1991 |
|
RU2007046C1 |
| Некогерентный оптический коррелятор | 1984 |
|
SU1182550A1 |

Изобретение относится к устройствам бесконтактного измерения параметров движения и может быть использовано в системах наземной навигации для определения координат подвижных объектов. Целью изобретения является повышение точности измерения и быстродействия устройства. В устройство для измерения параметров движения объекта, содержащее два информационно-измерительных канала, подключенных к входам двухканального коррелятора, и блок определения параметров движения, введена в каждый информационно-измерительный канал матрица М анализирующих оптических масок, инвариантных к вращению, которая используется для компенсации колебаний объекта относительно поперечной оси. 1 з.п. ф-лы, 8 ил.
20
13
22
И
f f f
фи.2
ЖЕЕ.
23
20
Вт N ttixeiat груп- От N lutsooS груп - пи Sbtxodot г тик пы itwdon гинк
Фие.З
(Pus.
фиг. 5
28
32
53
,|5 f-
5В
5ff
52
f/
57
.B
я iHmci&i sffyn- n imoSoSZZf Mif
Lvt.tixK-rjaiaajaAeK A-rjjbJaajeft ieMJt
58
CO
| Белоглазов И.Н | |||
| и др | |||
| KoppejiH- ционно-эйстремальные системы | |||
| М.: Советское радио, 1974, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
