Изобретение относится к вибрационной технике и может быть использовано при автоматизации транспортно-загрузочных, просеивающих и встряхивающих операций в машиностроительной, приборостроительной, легкой и радиоэлектронной промышленности, а именно к вибрационным устройствам с регулируемыми осевыми и крутильными колебаниями рабочего органа.
Целью изобретения является расширение функциональных возможностей.
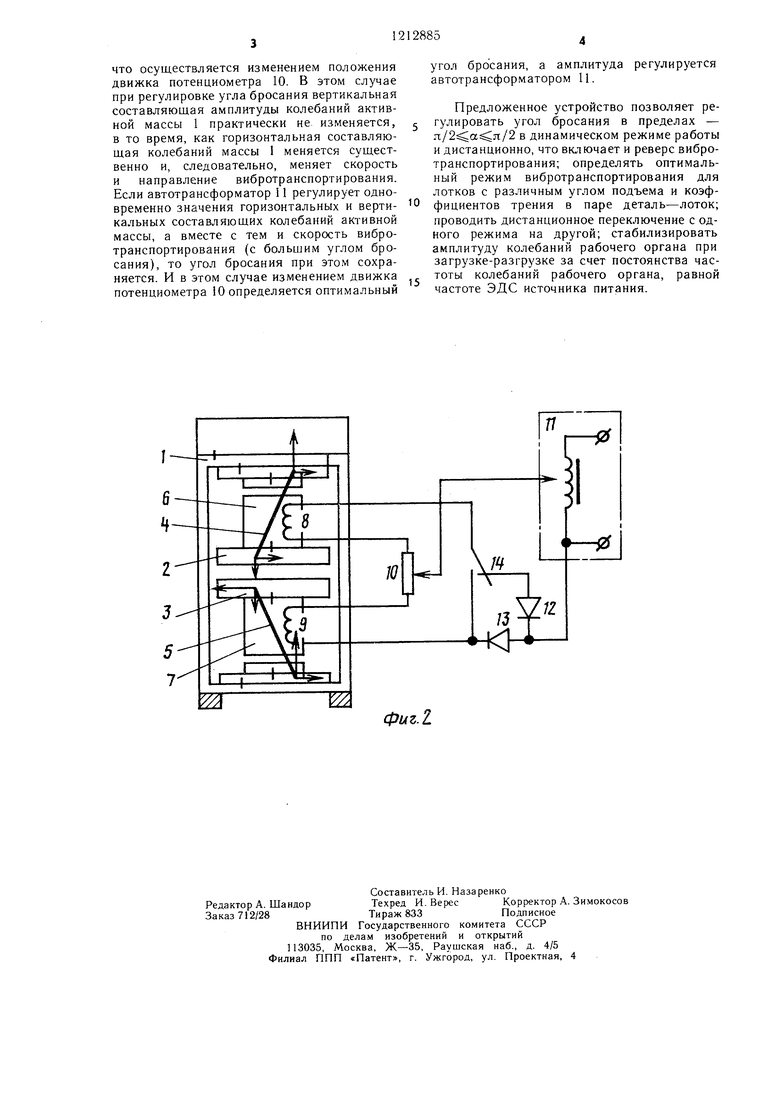
,На фиг. 1 и 2 показана механическая схема предлагаемого устройства и принципиальная схема регулирования возмуц),аю- шими силами электромагнитов при действии их в фазе (фиг. 1) и противофазе (фиг. 2).
Вибрационное устройство содержит активную массу 1 (с рабочим органом-чашей), например, в виде цилиндра и две промежуточные массы 2 и 3, упругие подвески 4 и 5 в виде наклонных плоских пружин с противоположным наклоном в этих подвесках, два центрально размещенных электромагнита 6 и 7 вибровозбудителей. При этом электромагниты 6 и 7 содержат обмотки 8 и 9, одними выводами соединенные с потенциометром 10, подвижный контакт последнего подключен к одному зажиму автотрансфор- матора 11, к другому зажиму которого подключены разноименные полюса диодов 12 и 13, обмотка 9 соединена другим выводом с другим полюсом диода 13, а обмотка 8 в одном положении переключателя 14 другим выводом подсоединена к другому полюсу диода 12, в другом положении переключателя 14 подсоединена к второму выводу обмотки 9.
Вибрационное устройство работает следующим образом.
Упругие подвески 4 и 5 настроены на околорезонансные частоты, близкие частоте пульсации магнитной возмущаюш,ей силы соответственно каждого из электромагнитов 6 и 7 вибровозбудителей, а промежуточные массы 2 и 3 суммарным воздействием пере- дают колебания активной массе 1, которая совершает колебания с частотой, равной частоте ЭДС источника питания (автотрансформатора) 11. Если одна парциальная вибросистема, включающая, например, промежуточную массу 2 с электромагнитом 6 на упругой подвеске 4, настроена на дорезо- нансный (зарезонансный) режим, то вторая парциальная вибросистема, включающая промежуточную массу 3 с электромагнитом 7 на упругой подвеске 5, настроена на заре- зонансный (дорезонансный) режим. Такая настройка позволяет стабилизировать частоту и амплитуду колебаний рабочего органа при изменении его загрузки. При работе обоих вибровозбудителей в фазе (режим вибротранспортирования при небольших углах бросания) соответственно положению переключателей 14 на схеме фиг. 1, когда обмотки 8 и 9 включены параллельно и через
один диод 13 связаны с автотрансформатором II, воз.мущающие силы их действуют в фазе, а противоположный наклон пружин в подвесках 4 и 5 обеспечивает суммарное воздействие горизонтальных составляющих (в фазе) и разностное воздействие вертикальных составляющих (в протквофазе) колебаний промежуточных масс 2 и 3 на активную массу 1. Последнее обеспечивает возможность изменения в динамическом режиме направления передачи вибрации на активную массу 1, что производится путем изменения положения движка потенциометра 10, номинал которого подбирается из предпосылок требуемого диапазона регулирования угла бросания. При такой регулировке угла бросания горизонтальная составляющая амплитуды колебаний активной массы практически не изменяется, в то время как вертикальная составляющая амплитуды колебаний массы 1 меняется существенно и, следовательно, меняет скорость и направление вибротранспортирования. Изменение положения движка автотрансформатора И изменяет одновременно значения горизонтальной и вертикальной составляющих колебаний активной массы и вместе с тем и скорость вибротранспортирования, но угол бросания при этом сохраняется. Следовательно, изменением движка потенциометра 10 определяется оптимальный угол бросания, обеспечивающий наибольшую скорость вибротранспортирования при наи.меньшей амплитуде колебаний рабочего органа, а сама скорость регулируется значением напряжения автотрансформатора П.
При работе обоих вибровозбудителей в противофазе (режим вибротранспортирования при больших углах бросания) соответственно положению переключателя 14 схеме фиг. 2, когда каждая из обмоток 8 и 9 через свой диод 12 или 13 связана с автотрансформатором 11, возмущ.ающие силы их действуют в противофазе, а противоположный наклон пружин в подвесках 4 и 5 обеспечивает суммарное воздействие вертикальных составляющих и разностное воздействие горизонтальных составляющих колебаний масс 2 и 3 на активную массу I. При этом в один полупериод колебаний активной массы 1 синфазно действуют возбуждающее усилие массы 2 (3) под действие.м электромагнитной возбуждаюпдей силы электромагнита 6 (7) и возбуждающее усилие массы 3 (2) под воздействием потенциальных сил упругой подвески 5 (6), а в другой полупериод синфазно действуют возбуждающее усилие промежуточной массы 3 (2) под воздействием электромагнитной силы электромагнита 7 (6) и возбуждающее усилие массы 2 (3) под воздействие.м потенциальных сил упругой подвески 6 (5). Аналогично в этом случае обеспечивается возможность изменения в динамическом режиме направления передачи вибрации на активную массу i.
что осуществляется изменением положения движка потенциометра 10. В этом случае при регулировке угла бросания вертикальная составляющая амплитуды колебаний активной массы 1 практически не изменяется, в то время, как горизонтальная составляющая колебаний массы I меняется существенно и, следовательно, меняет скорость и направление вибротранспортирования. Если автотрансформатор 11 регулирует одновременно значения горизонтальных и верти- кальных составляющих колебаний активной массы, а вместе с тем и скорость вибротранспортирования (с больщим углом бросания), то угол бросания при этом сохраняется. И в этом случае изменением движка
потенциометра 10 определяется оптимальный
.
угол бросания, а амплитуда автотрансформатором 11.
регулируется
О15
Предложенное устройство позволяет регулировать угол бросания в пределах - в динамическом режиме работы и дистанционно, что вк тючает и реверс вибротранспортирования; определять оптимальный режим вибротранспортирования для лотков с различным углом подъема и коэффициентов трения в паре деталь-лоток; проводить дистанционное переключение с одного режима на другой; стабилизировать амплитуду колебаний рабочего органа при загрузке-разгрузке за счет постоянства частоты колебаний рабочего органа, равной частоте ЭДС источника питания.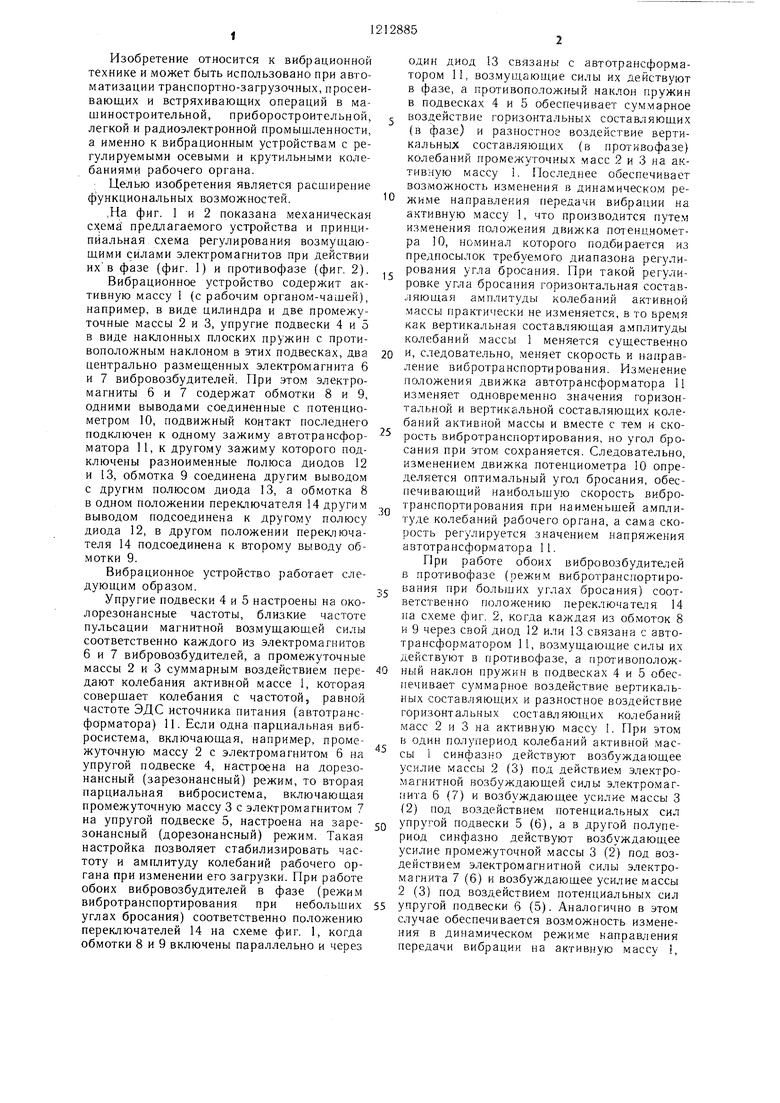
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационное устройство | 1990 |
|
SU1763328A1 |
| Вибрационное устройство | 1989 |
|
SU1648860A1 |
| Вибрационное устройство | 1985 |
|
SU1305093A1 |
| Устройство для управления виброприводом | 1988 |
|
SU1562891A1 |
| Вибромашина | 1991 |
|
SU1808420A1 |
| Многомассный вибрационный подъемник | 1990 |
|
SU1749132A1 |
| СПОСОБ РЕАЛИЗАЦИИ ЦЕНТРОБЕЖНЫМ ВИБРОВОЗБУДИТЕЛЕМ АСИММЕТРИЧНОГО ВИБРАЦИОННОГО ДВИЖЕНИЯ КОЛЕБАТЕЛЬНОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ | 1995 |
|
RU2113919C1 |
| Способ возбуждения колебаний вибрационного питателя и устройство для его осуществления | 1991 |
|
SU1799825A1 |
| Вибрационное устройство | 1979 |
|
SU821089A1 |
| Способ преобразования синхронных синфазных гармонических колебаний вибротранспортных и технологических устройств в синхронные гармонические колебания со сдвигом фазы и получением фигур Лиссажу | 2022 |
|
RU2789250C1 |
фиг. 2.
| Рабинович А | |||
| Н | |||
| Автоматические загрузочные устройства вибрационного типа | |||
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Рабинович А | |||
| Н | |||
| Автоматические загрузочные устройства вибрационного типа | |||
| Киев, 1965, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
