i
Изобретение относится к устройствам для очистки балласта железнодорожного пути.
Цель изобретения - повьшение эф-, фективности рабочего органа,
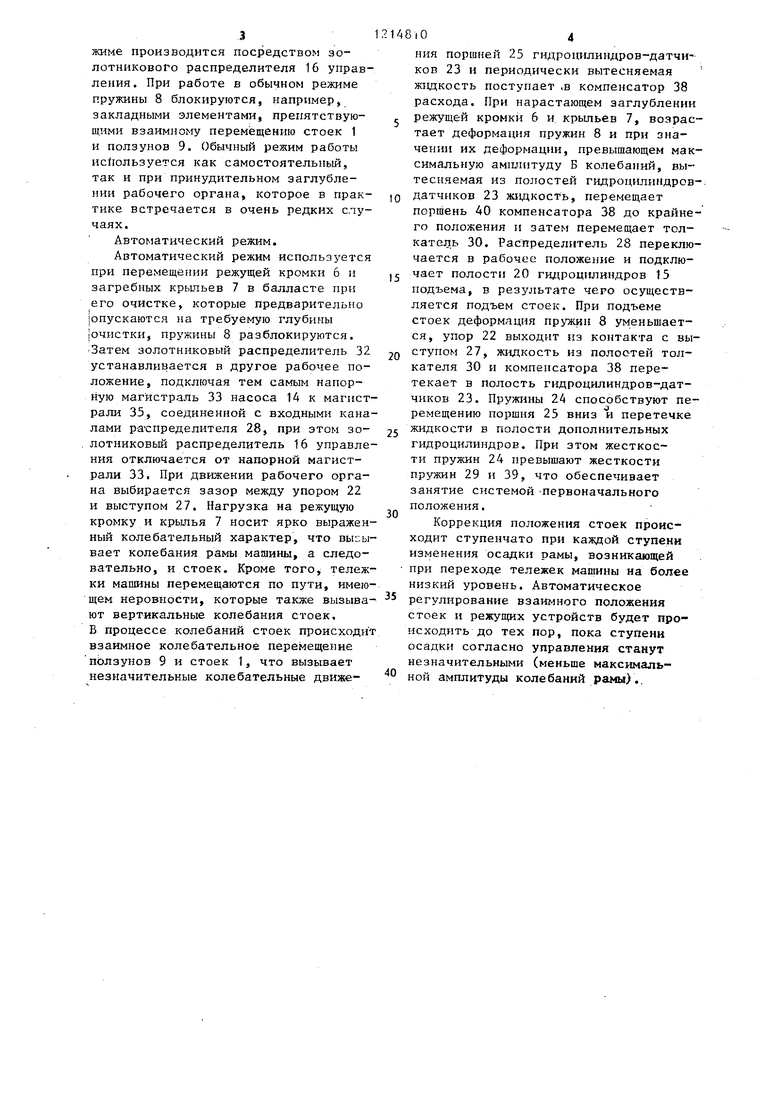
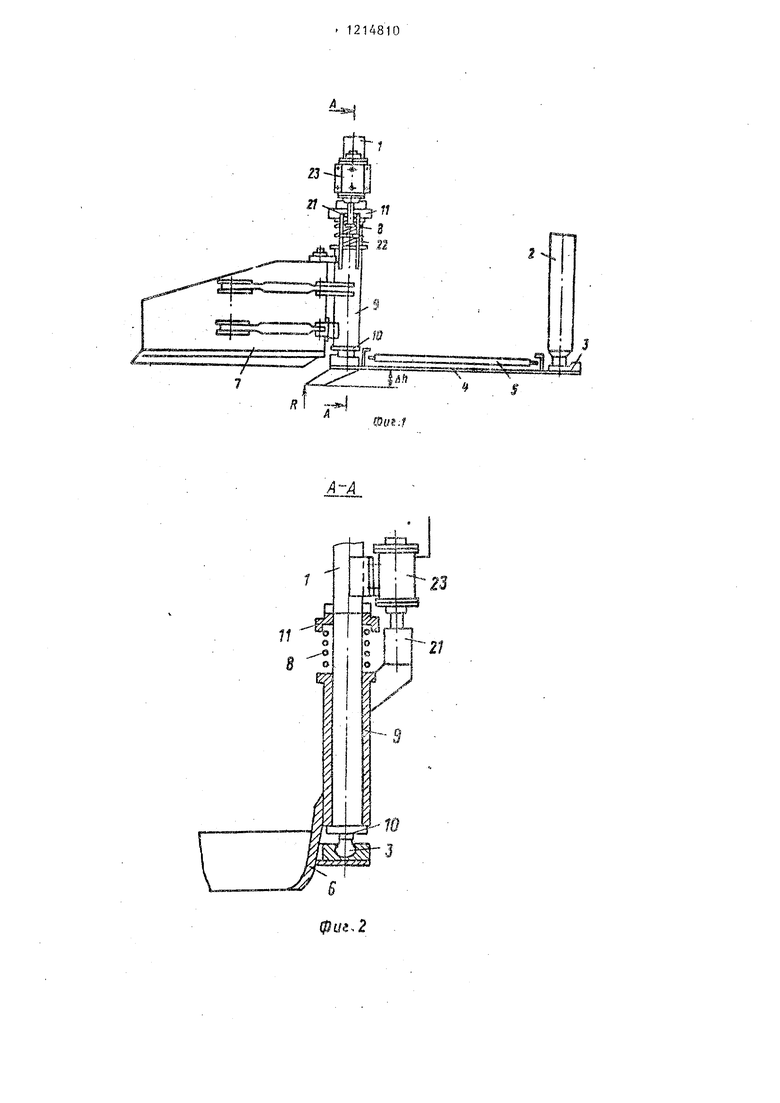
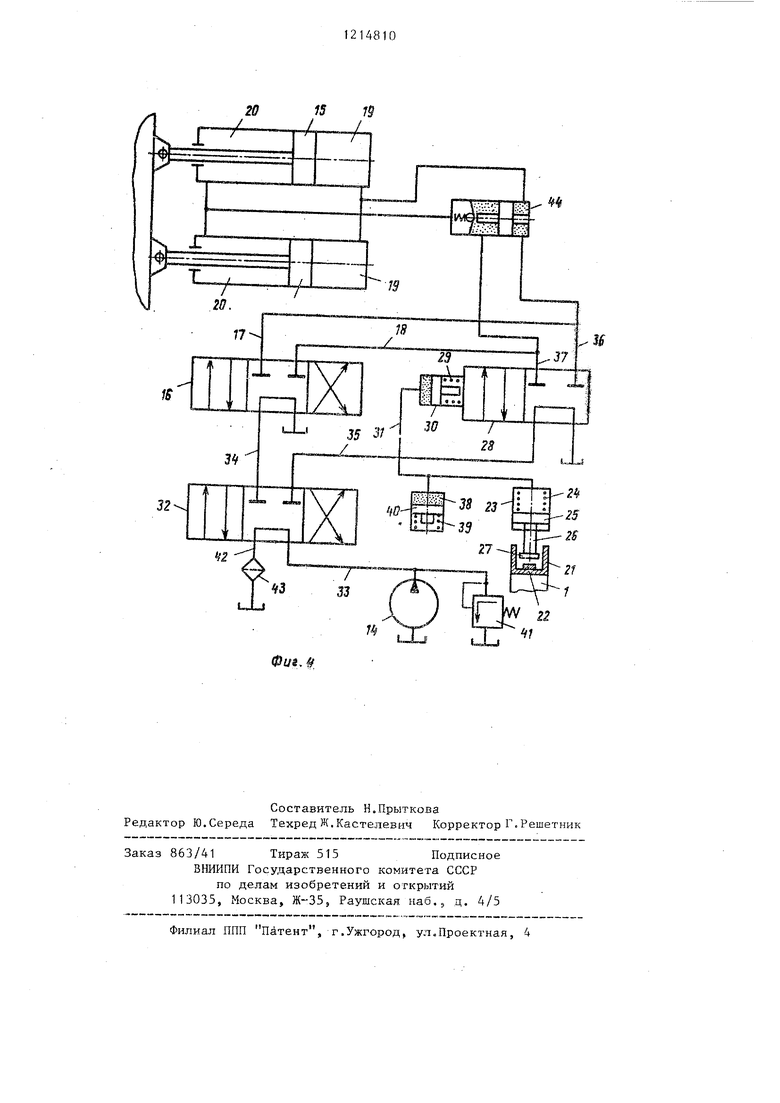
Па фиг, 1 изображен рабочий орган щебнйочистительной-машины, вид сбоку ка фиг, 2 - сечение А-А па фиг, 1; на фиг, 3 - в1Щ спереди на половину рабочего органа (до оси. симметрии); на фиг„ 4 - гидросхема рабочего органа.
Рабочий орган монтируется па, базовой машине посредством передних и задних 2 опорных стоек, которые ша нирами 3 прикреплены к поддерживающей раме 4, внутри которой пропущена движущаяся сетка 5.Режущая кромка 6 и загребные крылья 7 прикреплены к подпружиненным пружинам 8 и ползу нам 9, установленным на передних опорных стойках 1 с возможностью пермещения относительно них. На стойках 1 в нижней части жестко закреплены опорные шайбы 10 для ограниче- ния хода режущей кромки 6 и загребных крьишев 7 вниз. На передних с ойках 1 установлены подвггжные фиксаторь 11, обеспечивающие предварительное зажатие пружин 8, создаю- щих вертикальное прижимное усилие режуд1их элементов к балласту. Стойки Ги 2 крепятся к раме 12 базовой маБ1ины посредством параллелограм- мной подвески 13. Подъем и опускание стоек 1 и 2 осуществляется гидро приводом, содержащим насос 14, гид- роцили1 дрь 15 подъема и золотнико- вьш распределитель б управления, выходные каналы 17 и 18 которого соединены с разноименными полостями 19 и 20 гидро1Ц1Линдров 15, На ползунах 9 жестко закреплены направляющие 21 с упорами 22, а на стойках установлены гидроцилиндры-датчпки 23 с подпруткинеиными прузгшнами 24 и поршнями 25 и штоками 26 с закрепленными на их концах выступами 27. Выступы 27 размещены в направляющих 21 с зазором по отношению к упорам 22, Гидропривод рабочего органа содержит также золотниковый распределитель 28 с гид.равлическим подпружииеН1 ым пругкипой 29 толкателем 30, рабочая полость которого соединена с Полостями гидродилиндра-датчи- ка 23 магистралью 31 и золотникового распределителя 32, входной канал которого соединен с напорной ма
102
гистралью 33 насоса 14, а выходные с напорными каналами золотникового распределителя 16 управления и распределителя 28 соответственно магистралями 34 и 35. Выходные каналы распределителя 28 параллельно соединены с выходньми каналами золотникового распределителя 16 управления магистралями 36 и 37, К полости соответствующего гидро- щшиндра-датчика 23 подсоединен компенсатор 38 расхода рабочей сре- ды представляющий собой ги,ропи- линдр одностороннего действия с подпружиненным пружиной 39 поршнем 40. Для обеспечения надежности гидропривода и фиксап.ии гидроцилиндров 15 в нейтральном положении в :апорной магистрали 33 установлен предохранительный клапан 4 t,, в сливной магистрали 42 - фильтр 43 и в магистралях гидроцилкндров 15 - гидрозамок 44. Компенсатор 38 ряс- хода должен обеспечивать иесрабаты- iiain-ie толкателя 30 при колебаниях с максимальной амплитудой Б стоек в процессе перемещения задней тележ кн машины по нерогзпостям пути. Поэтому отношение жесткости Я,- пру;ки- ны 29 толкателя 30 и жесткости Л, 39 компенсатора 38 должно подчиняться закону
Лт
2 Б tU
Лк Хот dl « где начальная деформация
пружины 29 толкателя 30; с1и,,с1к - диаметры поршней соответственно толкателя 30 и I ciMHGHcaTopa 38. Рабочий орга щебнеочиститель- пой маимьгы может работать как в обычном, так к в автоматическом режиме,
Обглчпь Г работы.
Золотни - овый распределитель 32 соедиляет напорную магистраль 33 насоса 14 с магистралью 34, тем ) подсоединяет к работе золот- ННКОВ1ЛЙ распределитель 16 упраиле- ния. Магистраль 35 соединяется со сливной магистралью 42 и распре- де.нтс;л.ъ 2о не имеет подвода жидкости со стороны насоса 14, его вькодиые каналы, соединенные магистралями 36 и 37 с полостями ,роцйлинд.ров 15, закрыты и перетечка ;{сидкости через распределитель 28 устранена. Подъем и опус- Kainje рабочего органа в обычном ре,3
жиме производится посредством золотникового распределителя 16 управления. При работе в обычном режиме пружины 8 блокируются, например, закладными элементами, препятствующими взаимному перемещению стоек 1 и ползунов 9. Обычный режим работы используется как самостоятельный, так и при принудительном заглублении рабочего органа, которое в практике встречается в очень редких случаях.
Автоматический режим.
Автоматический режим используется при перемещении режущей кромки 6 и загребных крьтьев 7 в балласте при его очистке, которые предварительно опускаются lia требуемую глубины |очистки, пружинь 8 разблокируются. Затем золотниковый распределитель 32 устанавливается в другое рабочее положение, подключая тем самым напорную магистраль 33 насоса 14 к магистрали 35, соединенной с входными каналами р-а спределителя 28, при этом зо- лотниковьш распределитель 16 управления отключается от напорной магистрали 33. При движении рабочего органа выбирается зазор между упором 22 и выступом 27. Нагрузка на режущую кромку и крылья 7 носит ярко выраженный колебательный характер, что БЫГ.Ы- вает колебания рамы машины, а следовательно, и стоек. Кроме того, тележки машины перемещаются по пути, имеющем неровности, которые также вызывают вертикальные колебания стоек. Б процессе колебаний стоек происходит взаимное колебательное перемещение пЬлзунов 9 и стоек 1, что вызывает незначительные колебательные движе148)04
ния поршней 25 гидроцилиндров-датчиков 23 и периодически вытесняемая жвдкость поступает ,в компенсатор 38 расхода. При нарастающем заглублении t режущей кромки 6 и крыльев 7, возрастает деформация пружин 8 и при значении их деформации, превышающем максимальную амшштуду Б колебаний, вытесняемая из полостей гидроцилиндров(0 датчиков 23 жидкость, перемещает
поршень 40 компенсатора 38 до крайнего положения и затем перемещает толкатель 30. Распределитель 28 переключается в рабочее положение и подклю15 чает полости 20 гидроцилиндров 15 подъема, в результате чего осуществляется подъем стоек. При подъеме стоек деформация пружин 8 уменьщает- ся, упор 22 выходит из контакта с вы2Q ступом 27, жидкость из полостей толкателя 30 и компенсатора 38 перетекает в полость гидроцилиндров-датчиков 23, Пружины 24 способствуют перемещению поршня 25 вниз и перетечке
25 жидкости в полости дополнительных гидроцилиндров. При зтом жесткости пружин 24 превышают жесткости пружин 29 и 39, что обеспечивает занятие системой Первоначального положения.
Коррекция положения стоек происходит ступенчато при каждой ступени изменения осадки рамы, возникающей при переходе тележек машины на более низкий уровень. Автоматическое
5 регулирование взаимного положения стоек и режущих устройств будет происходить до тех пор, пока ступени осадки согласно управления станут незначительными (меньше максималь ной амплитуды колебаний рамы)..
30
.Xl. ::;;: Т
.-n™.v-.M,,
R J
s
ffitff.f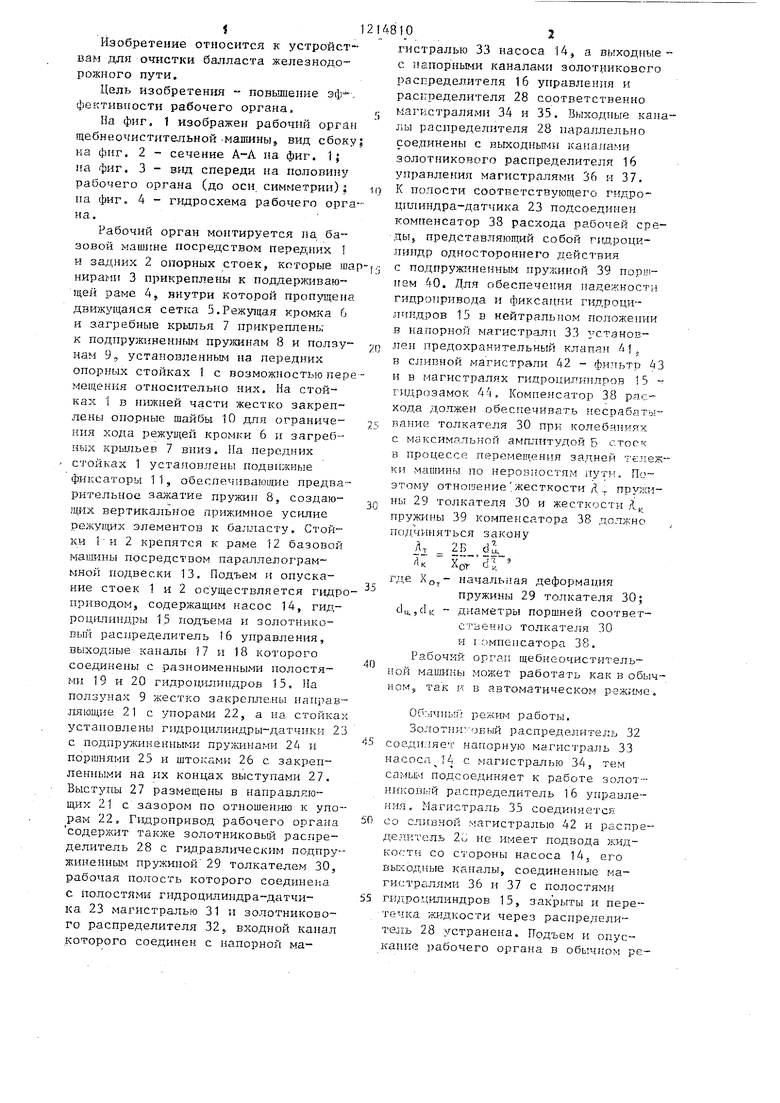
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган щебнеочистительной машины | 1984 |
|
SU1232721A1 |
| Устройство для уплотнения балласта железнодорожного пути | 1989 |
|
SU1710637A1 |
| Гидросистема управления рабочими органами шпалоподбивочного устройства | 1990 |
|
SU1761844A1 |
| Устройство для перемещения исполнительного органа проходческой машины | 1983 |
|
SU1094960A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2100193C1 |
| Гидравлическая система управления рабочим органом землеройной машины | 1978 |
|
SU876889A2 |
| ГИДРОСИСТЕМА УПРАВЛЕНИЯ РАБОЧИМИ ОРГАНАМИ ШПАЛОПОДБИВОЧНОГО УСТРОЙСТВА | 1991 |
|
RU2020196C1 |
| Гидравлическая система управления рабочим органом землеройной машины | 1976 |
|
SU749997A1 |
| Гидравлический привод грузоподъем-НОй МАшиНы | 1979 |
|
SU796333A1 |
| СИЛОВОЙ ГИДРАВЛИЧЕСКИЙ БЛОК ПИТАНИЯ МОБИЛЬНОЙ МАШИНЫ | 2004 |
|
RU2277188C2 |

(p(/e. J
/
Фиа,
| Соломонов С.А | |||
| Путевые машины | |||
| М | |||
| : Транспорт, 1977, с | |||
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
