(54) ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система управления рабочим органом землеройной машины | 1976 |
|
SU749997A1 |
| Гидропривод бульдозера | 1974 |
|
SU763538A1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2011 |
|
RU2470120C1 |
| ЭЛЕКТРОННО-ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ОТВАЛОМ БУЛЬДОЗЕРА | 2016 |
|
RU2624079C1 |
| Двухпоточный гидропривод экскаватора | 1979 |
|
SU891869A1 |
| Стенд для исследований процесса копания рабочими органами землеройных машин | 1988 |
|
SU1698379A1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1989 |
|
RU2068060C1 |
| Гидропривод землеройной машины | 1980 |
|
SU866077A1 |
| Шнековый траншеезасыпатель | 1985 |
|
SU1283310A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1983 |
|
SU1165249A2 |
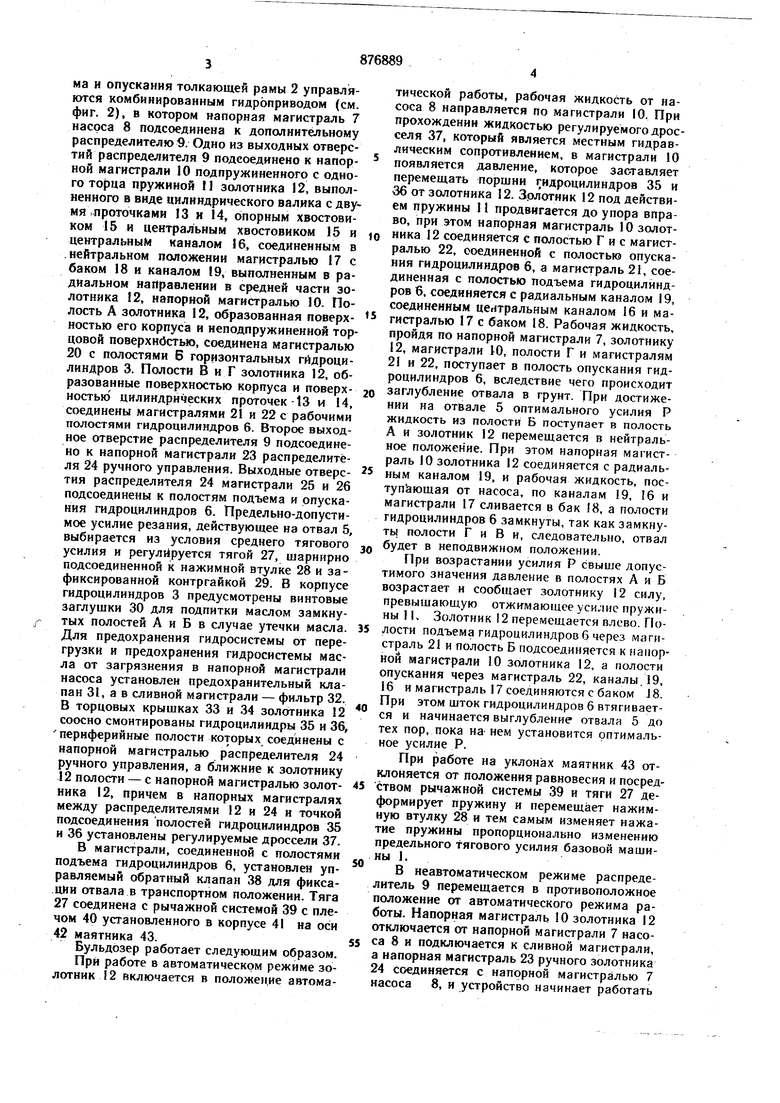
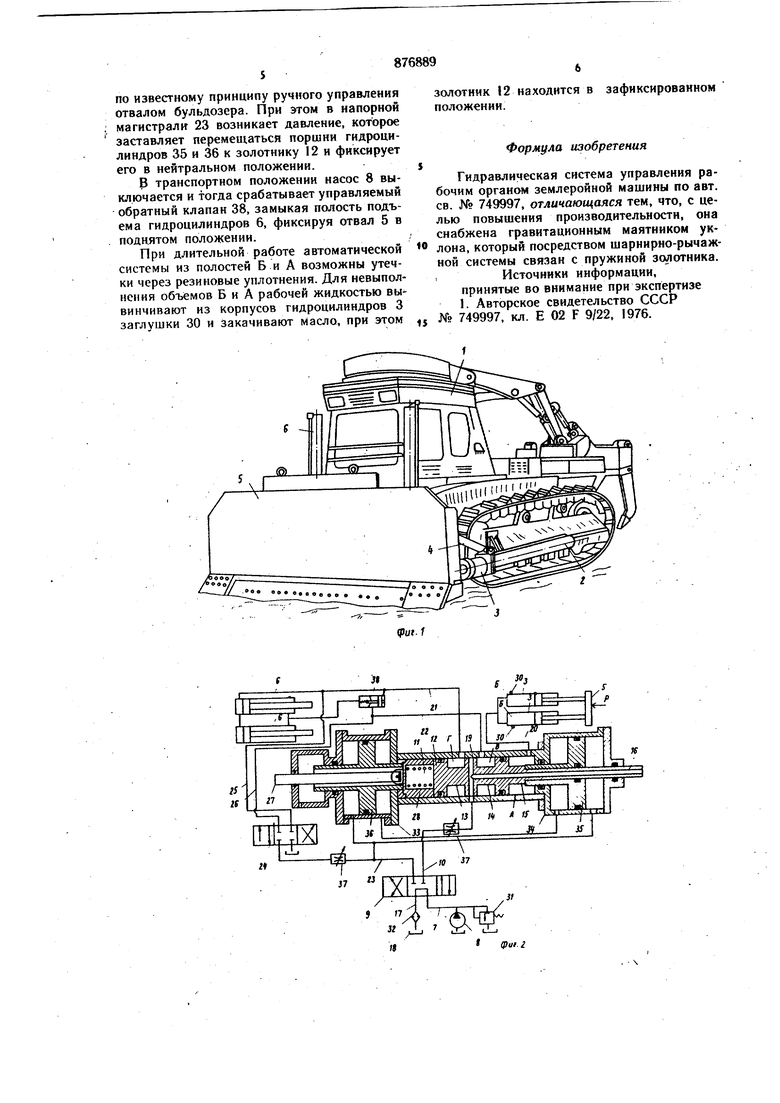
Изобретение относится к области землеройных машин, а именно к гидравлической системе управления рабочим органом бульдо зера. Известна гидравлическая система управления рабочим органом землеройной машины, включающая насос, соединеиный напорными магистралями через клапан-распределитель с клапаном ручного управления ,и распределительным устройством, на золотник которого со стороны торца, противоположного штоку, установлена пружина с регулируемой затяжкой, гидроцилиндры Подъема и опускания рабочего органа, сливную магистраль с фнльтром, при этом торцы корпуса распределительного устройства оснащены гидроцилиндрами с установленными в них поршнями, штоки которых взаимодействуют с подпружиненным золотником, а поршневые полости гидроцилиндров соединены с напорной магистралью клапана ручного управления, а штоковые полости - с напорной магистралью распределительного устройства 1П. Недостатком известной гидравлической системы управления рабочим органом землеройной машины является то, что при работе на уклонах сннжается пронзводительность машины из-за нарушення соответствия тягового усилия и силы нажатня пружины в золЬтнике. Цель изобретения - повышение производительности. Поставленная цель достнгается за счет того, что гидравлическая система управления рабочим органом землеройной машины снабжена маятником уклона, который посредством шарнирно-рычажной системы связан с пружиной золотника. На фиг. I изображено предлагаемое устройство, об1иий внд; на фиг. 2 - принципиальная гидравлическая схема гидропри.вода; на фиг. 3 - связь маятника уклона с пружиной. К базовой машине I шарнирно подсоединена толкающая рама 2, которая подсоединена посредством штоков горизонтальных гидроцилиндров 3, встроенных в нее, и раскосов 4 к отвалу 5. К толкающей раме 2 н к . раме базовой машины I шарнирно подсоединены гидроцилнндры 6 подъема н опускания толкающей рамы 2. Гндроцилиндры 6 подъема и опускания толкающей рамы 2 управляются комбинированным гидроприводом (см. фиг. 2), в котором напорная магистраль 7 насоса 8 подсоединена к дополнительному распределителю 9. Одно из выходных отверстий распределителя 9 подсоединено к напорной магистрали 10 подпружиненного с одного торца пружиной 11 Золотника 12, выполненного в виде цилиндрического валика с двумя -проточками 13 н 14, опорным хвостовиком 15 и центральным хвостовиком 15 и центральным каналом 16, соединенным в .нейтральном положении магистралью 17 с баком 18 и каналом 19, выполненным в радиальном направлении в средней части золотника 12, напорной магистралью 10. Полость А золотника 12, образованная поверхностью его корпуса и неподпружиненной торцовой поверхностью, соединена магистралью 20 с полостями 6 горизонтальных гйдроцилиндров 3. Полости В и Г золотника 12, образованные поверхностью корпуса и поверхностью цилиндрических проточек-13 и 14, соединены магистралями 21 и 22 с рабочими полостями гидроцилиндров 6. Второе выходное отверстие распределителя 9 подсоединено к напорной магистрали 23 распределителя 24 ручного управления. Выходные отверстия распределителя 24 магистрали 25 и 26 подсоединены к полостям подъема и опускания гидроцилиндров 6. Предельно-допустимое усилие резания, действующее на отвал 5, выбирается из условия среднего тягового усилия и регулируется тягой 27, щарнирно подсоединенной к нажимной втулке 28 и зафиксированной контргайкой 29. В корпусе гидроцилиндров 3 предусмотрены винтовые заглушки 30 для подпитки маслом замкнутых полостей А и Б в случае утечки масла. Для предохранения гидросистемы от перегрузки н предохранения гидросистемы масла от загрязнения в напорной магистрали насоса установлен предохранительный клапан 31, а в сливной магистрали - фильтр 32. В торцовых крыщках 33 и 34 золотника 12 соосно смонтированы гидроцилиндры 35 и 36, периферийные полости которых соединены с напорной магистралью распределителя 24 ручного управления, а ближние к золотнику 12 полости - с напорной магистралью золотинка 12, причем в напорных магистралях между распределителями 12 и 24 и точкой подсоединения полостей гидроцилиндров 35 и 36 установлены регулируемые дроссели 37. В магистрали, соединенной с полостями подъема гидроцилиндров 6, установлен управляемый обратный клапан 38 для фиксации отвала в транспортном положении. Тяга 27 соединена с рычажной системой 39 с плечом 40 установленного в корпусе 41 на оси
42 маятника 43.
Бульдозер работает следующим образом. При работе в автоматическом режиме золотник 12 включается в положение автоматической работы, рабочая жидкость от насоса 8 направляется по магистрали 10. При прохождении жидкостью регулируемого дросселя 37, который является местным гидравлическим сопротивлением, в магистрали 10 появляется давление, которое заставляет перемещать поршни гидроцилиндров 35 и 36 от золотника 12. Золотник 12 под действием пружины 11 продвигается до упора вправо, при этом напорная магистраль 10 золотника 12 соединяется с полостью Г и с магистралью 22, соединенной с полостью опускания гидроцилиндров 6, а магистраль 21, соединенная с полостью подъема гидроцилйндров 6, соединяется с радиальным каналом 19, соединенным центральным каналом 16 и магистралью 17 с баком 18. Рабочая жидкость, пройдя по напорной магистрали 7, золотнику 12, магистрали 10, полости Г и магистралям 21 и 22, поступает в полость опускания гидроцилиидров 6, вследствие чего происходит заглубление отвала в грунт. При достижении на отвале 5 оптимального усилия Р жидкость из полости Б поступает в полость А и золотник 12 перемещается в нейтральное положение. При этом напорная магистраль 10 золотника 12 соединяется с радиальным каналом 19, и рабочая жидкость, поступйюшая от насоса, по каналам 19, 16 и магистрали 17 сливается в бак 18, а полости гидроцнлиндров 6 замкнуты,так как замкнуть полости Г и В и, следовательно, отвал будет в неподвижном положении.
При возрастании усилия Р свыше допустимого значения давление в полостях А и Б возрастает и сообщает золотнику 12 силу, превышающую отжимающее усилие пружины 11, Золотник 12 перемещается плево. Полости подъема гидроцилинлров 6 через магистраль 21 и полость Б подсоединяется к напорной магистрали 10 золотника 12, а полости опускания через магистраль 22, каналы. 19, 16 н магистраль 17 соединяются с баком J8. При этом шток гидроцилиндров 6 втягивается и начинается выглубление отвала 5 до тех пор, пока на нем установится оптимальное усилие Р.
При работе на уклонах маятник 43 отклоняется от положения равновесия и посредством рычажной системы 39 и тяги 27 деформирует пружину и перемещает нажимную втулку 28 и тем самым изменяет нажатие пружины пропорционально изменению предельного тягового усилия базовой машины 1.
В неавтоматическом режиме распределитель 9 перемещается в противоположное положение от автоматического режима работы. Напорная магистраль Ю золотника 12 отключается от напорной магистрали 7 насоса 8 и подключается к сливной магистрали, а напорная магистраль 23 ручного золотника 24 соединяется с напорной магистралью 7 насоса 8, и устройство начинает работать
по известному принципу ручного управления отвалом бульдозера. При этом в напорной магистрали 23 возникает давление, которое заставляет перемещаться поршни гидроцилиндров 35 и 36 к золотнику 12 и фиксирует его в нейтральном положении.
В транспортном положении иасос 8 выключается и тогда срабатывает управляемый обратный клапан 38, замыкая полость подъема гндроцилиндров 6, фиксируя отвал 5 в поднятом положении.
При длительной работе автоматической системы из полостей Б и А возможны утечки через резиновые уплотнения. Для невыполнения объемов Б и А рабочей жидкостью вы винчивают из корпусов гидроцилиндров 3 заглушки 30 и закачивают Масло, при этом
золотник 12 находится в зафиксированном положении.
Формула изобретения
Гидравлическая система управления рабочим органом землеройной машины по авт. св. № 749997, отличающаяся тем, что, с целью повышения производительностн, она снабжена гравитационным маятником уклона, который посредством шарнирно-рычажной системы связан с пружиной золотника. ,Источники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 749997, кл. Е 02 F 9/22, 1976.
«
(U
:з В
