1
Предлагаемое изобретение относится к системам автоматического управления. Оно может найти. применение при решении задачи идентификации и управления нестационарных объектов на различных уровнях полноты априорной информации.
-Известен идентификатор объектов основанный на синхронном детектировании 1, содержащий первый и второй интеграторы, выходы которых через первую и вторую модели объекта идентификации соответственно соедй-нены с первым и вторым входами блока сравнения, первый и второй выходы которого соединены с соответствующими входами квадратора, третий и четвертый входы блока сравнения соединены с выходами объекта идентификации.
Недостаток известного идентификатора - м.алые помехоустойчивость точность и надежность.
Цель настоящего изобретения разработка такого идентификатора нестационарных объектов, который давал бы возможность повыситьточность, помехоустойчивость и надежность процесса распознавания параметров изучаемого объекта.
Согласно изобретению поставленн;ая цель достигается тем, что идентификатор нестационарных объектов содержит первый и второй управляемые
5 генераторы поисковых колебаний,первый выход квадратора.через первый управляемый генератор поисковых колебаний соединен со входами первого и второго интеграторов, а второй
10 выход - со входом второго управляе- . МОго генератора поисковых колебаний, первый выход которого соединен с первым входом объекта идентификации и вторым входом первой модели объек 5 та идентификации, а второй выход оо вторым входом объекта идентификации и вторым входом второй модели объекта идентификации. При этом решаются совместно защачи рас20 познавания параметров объекта идентификации, выбора длины интервала усредненияи формирования управляющих воздействий.
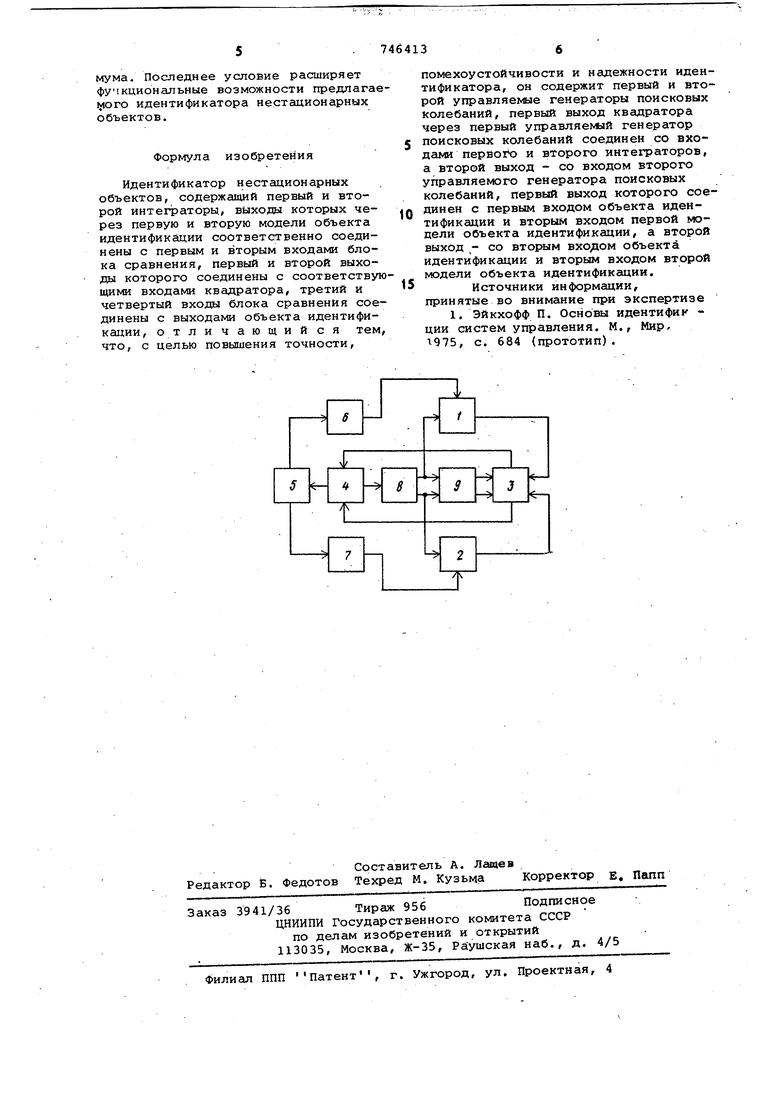
На чертеже представлена функцио25 нальная схема идентификатора нестационарных объектов.
Связи между э.пементами позволяют выделить два замкнутых поисковых . контура - контур оценки параметров
30 и контур оценки состояний. Контур
оценки параметров состоит из настраиваемых моделей объекта идентификации 1, 2, блока сравнения 3, квадратора 4, управляемого по частоте первого генератора 5 и первого и второго интегратора б, 7 и управляемого по частоте второго генератора 8.
Устройство работает следующим образом. При отсутствии сигнала рассогласования на выходе блока сравнения 3 (исходное состояние) на входы генераторов поисковых колебаний 5, 8 поступает сигнал, пропорциональный экстремальному значению функции качества. Последнее равносильно отсутствию текущей информации о поведении объекта идентификации 9. При этом генераторы поисковых колебаний 8, 5 формируют ортогональные периодические сигналы постоянной амплитуды.
В момент возникновения сигнала рассогласования на входы генераторо поисковых колебаний 5, 8 поступают сигналы, по величине не соответствующие экстремальному значению функции качества. На выходах генераторов формируются сигналы постоянной амплитуды с частотами, зависящими от положения системы по отношению к экстремуму. При движении системы в область экстремума частота поисковых сигналов возрастает, достигая своего максимального значения в экстремальной точке. При удалении поисковых движений от экстремума частоты уменьшаются до величин начальных частот генераторов поисковых колебаний 5,8. Здесь обеспечивается такое управление частотой поисковых сигналов, что их постоянная составляющая является оценкой градиента функции качества по параметру или состоянию.Последнее обстоятельство используется для организации движения к экстремуму функции качества.
Контуроценки параметров работает следующим образом. При возникновении сигнала рассогласования на вход первого генератора 5 поступает сигнал оценки с квадратора 4. Этот сигнал содержит текущуюинформацию о величине несоответствия варьируемых коэффициентов настраиваемых моделей 1, 2 и параметров объекта идентификации 9. На базе этой информации, закодированной в измене нии частоты формируемых генератором сигналов, организуются встречные движения, попарно варьируемых коэффициентов настраиваемых моделей объекта идентификации. Процедура распознавания параметров объекта идентификации 9 производится до тех пор, пока не выполнится равенство параметров объекта идентификации 9 и соответствующих варьируемых коэффициентов моделей 1, 2. При этом функция качества достигает своего экстремального значения.
В свою очередь, работу контура оценки состояний рассмотрим следующим образом. В момент появления сигнала рассогласования на выходе блока сравнения 3 на вход генератора поисковых колебаний 8 поступает сигнал с квадратора 4, несущий информацию о состоянии объекта 9 и нacтpaивae «x моделей 1, 2. Изменение частоты управляющих воздействий, поступающих на входы настраиваемых моделей и объекта идентификации, соответствует информации:
-о состоянии системы в данный момент времени;
-о характеристиках сигнала управления, необходимого для эффективного распознавания параметров объекта идентификации.
Положительный эффект предлагаемого устройства заключается в следующем.
В предлагаемом идентификаторе нестационарных объектов применение управляемого по частоте генератора, фop даpyющeгo поисковые управляющие воздействия, повышает точность, надежность и быстродействие процесса распознавания параметров объекта идентификации;
. - начальные условия не являются дополнительными параметрами, подлежащими оптимальному выбору. Последнее упрощает техническую реализацию устройства в целом и повышает его надежность;
-в отличие от идентификаторов, реализованных на методе возмущения параметров, предлагаег-ий идентификатор нестационарных объектов может работать в диапазоне низких частот. Это позволяет идентифицировать объекты с достаточно большой инерционностью ;
-в предлагаемом устройстве автоматически решается задача выбора длины интервала усреднения. Это повышает быстродействие устройства, работающего на фоне помех и параметрических возмущений;
-сокращение в предлагаемом идентификаторе числа блоков перемножения упрощает техническую реализацию устройсгва в целом, повышает его надежнос ь и помехоустойчивость;
-предлагаемый идентификатор нестационарных объектов позволяет работать с функцией качества, имеющей локальные экстремума. Это обеспечивается уменьшением чабтоты управляемого генератора вдали от экстремума и возрастанием ее .по мере приближения к экстремуму, что дает возможность точно фиксировать достаточно малую область существования экстремума. Последнее условие расширяет фучкциопальные возможности предлагаеivioro идентификатора нестационарных объектов.
Формула изобретения
Идентификатор нестационарных объектов, содержащий первый и второй интеграторы., выходы которых через первую и вторую модели объекта идентификации соответственно соединены с первым и вторым входами блока сравнения, первый и второй выходы которого соединены с соответствующими входами квадратора, третий и четвертый входы блока сравнения соединены с выходами объекта идентификации, отличающийся тем, что, с целью повышения точности.
помехоустойчивости и нгщежности идентификатора, он содержит первый и второй управляемые генераторы поисковых колебаний, первый выход квадратора через первый управляемый генератор поисковых колебаний соединен со входами первохЪ и второго интеграторов, а второй выход - со входом второго управляемого генератора поисковых колебаний, первый выход которого соединен с первым входом объекта идентификации и вторым входом первой модели объекта идентификации, а второй выход - со вторым входом объекта идентификации и вторым входом второй модели объекта идентификации.
5
Источники информации, принятые во внимание при экспертизе 1. Эйкхофф П. Основы идентифик ции систем управления. М., Мир, 975, с. 684 {прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Идентификатор многомерных объектов | 1984 |
|
SU1215086A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Система автоматической идентификации | 1978 |
|
SU930270A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Устройство для определения динамических характеристик линейных объектов | 1974 |
|
SU554525A1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Адаптивный идентификатор | 1989 |
|
SU1647515A1 |
| Дифференциальная система идентификации | 1973 |
|
SU728113A1 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
