(54) СИСТЕМА ЭKCtPEMAЛЬHOГO УПРАВЛЕНИЯ
ных воздейстеий в устройстеах корректора и регулятора по воэмушеншо.
Однако, наряду с тем , когда управлению подвергается объект, функционирование которого.подчиняется изученным закономерностям, выраженным А1атематическим описанием с определенным приближением, существуют объекты с марковским процессом, для которых проблема управления приобретает принципиально новые черты из-за полного отсутствия априорных данных об объекте, неизученности его поведения. В этом случае возникают дополнительные требования к функциям, выполняемым экстремальной системой и ее узлами, а имено - необходимость идентификации характеристик объекта с помощью стохастичекой модели объекта.
Дополнительнью функции возникают в связи с расширением области применени такой системы экстремального управления. Следует также отметить, что эта система не решает задачи поиска экстремума управляющего воздействия при управлении многомерными процессами - при независимых либо явно коррелированных показателях процесса.
Цель предлагаемого изобретения состоит в расширении функциональных возможностей и области применения системы экстремального управления.
Поставленная цель достигается тем, что система экстремального управления дополнительно содержит блок определения характери(.-тшс объекта, первые входы которого соединены с выходами объекта, вторые - со вторъгми выходами корректора, а третий вход-со вторым выходом регулятора по возмущению, первые, вторые и третий выход соединены соответственно с первым, вторым и третьим выходами корректора,. а также тем, что блок определения характе ристик объекта содержит модель объект управления, узлы формирования знака производной, узел оценки регулирующих воздействий, узлы оценки качеств, первые входы которых подключены к первым входам блока определения характеристик, вторые входы соединены соответственно с первыми выходами моде объекта управления и первыми входами узлов формирования знака производной, Первйй вход модели, об.ъекта подключен к третьему входу блока определения характерист пс объекта, вторые входы ко вторым входам блока определения
характеристик объекта, второй выхб/i к третьему выходу блока опреаеления характеристик объекта, выходы узлов оценки качеств подсоединены к первым
выходам блока определения характери- . стик объекта, выходы узлов формирования знака производной: соединены соответственно со входами узла оценки регулирующих воздействий, выходы которого подключены ко вторым выходам блока определения характеристик объекта, и тем, что корректор содержит дешифратор, блок приоритета, узлы поиска оптимального воздействия, функциональный преобразователь, выход которого подключен к первому выходу корректора, первый вход подключен к третьему входу корректора, а остальные входы соединены с выходами узлов поиска оптимяльного воздействия и со вторыми выходами корректора, первые входы узлов поиска оптимального воздействия подсоединены ко вторым входам корректора, вторые соединены с выходами блока приоритета, входы которого соединены с выходами дешифратора, входы которого подключены к первым входам корректора.
Особенностью предлагаемой системы является наличие стохастической модели объекта управления. .Такая модель может быть реализована либо на ЭВМ с помощью языка вероятностнърс автоматов, либо устройством на базе-вероятностных автоматов и не требует наличия априорной информации о поведении объекта управления.
Применение вероятностных автоматов позволяет осуществить j прогноз поведения объекта управления при наборе апостериорной информации и синтез ;та основе этого набора оптимального управляющего воздействия с целью достижения экстремума многомерного управления.
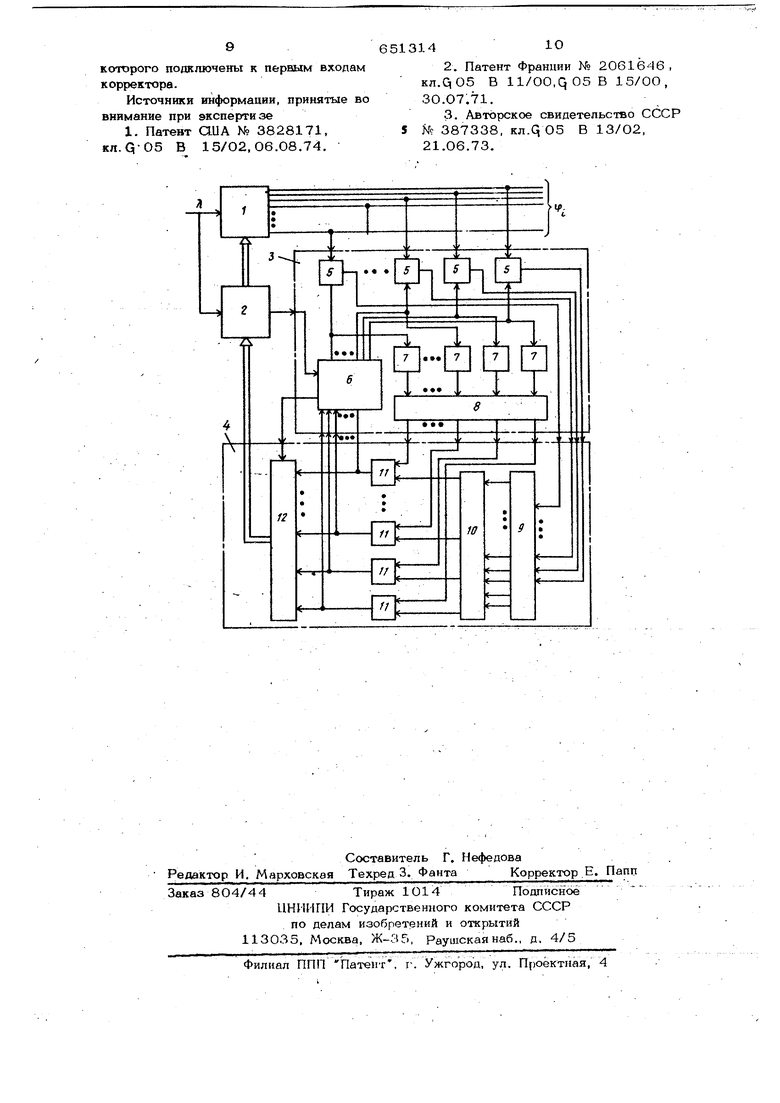
Ма чертеже приведена структурная схема системы.
Система содержит объект 1 управления, регулятор 2 по возмущению, блок 3 определения Характеристик объекта, корректор 4, узлы 5 оценки качества, модель 6 объекта управленля, узлы 7 формирования знака производной, узел 8 оценки регулирующих воздействий, дешифратор 9,-блок Ю приоритета, узлы 11 поиска оптимального воздействия, функциональный преобразователь 12, Я - воамупшющее воздействие; ф - показатель { - го критерия качества. Система работает следувЬшим образом. Узлы 5 оценки качества осуществляю контроль за изменением критерия качества ф по сравнению с соответствую щими критериями качества модели либо по заданной программе с определенным допуском на варьирование отклонений критерия от модельного, либр. осуществляется контроль за нахождением критерия качества в заданных статистичес границах. ПричЭтом, если критерий качества вышел из заданных границ, то на выходе узла 5 оценки качеств появи ся сигнал. Узлы 7 формирования знака произво ной осуществляют контроль за изменени показателей качества модеди (вызвано ли приложенным управляющим воздействием увеличение или уменьшение критериев качества модели). При этом, если критерий качества увеличивается, то на выхосе данного узла 7 формирования знака производной появится сигнал, в противном случае сигнал отсутствует. Узел 8 оценки регулирующих воздействий на основе сигналов с выходов узлов 7 формирования знака производной формирует сигналы оценки соответствия подаваемых управляющих воздействий от узлов 11 поиска оптимального воздейсавия. Дещифратор 9 осуществляет дешифри рование рассогласований критериев качеств модели и объекта управления. Блок 10 П{эиоритета подает управляющие сигналы на узлы 11 оценки регулирующих воздействий согласно приоритету регулирования .показателей качеств (так, например, при выплавке стали основным параметром, которому отдается старший приоритет, является содержание углерода, BTOpbiM по приоритету параметром является скорость выгорания углерода и далее подобным образом). ; Функциональный преобразователь 12 осуществляет преобразование цифровых управляющих сигналов в сигналы либо цифровые, но иные по параметрам, либо в сигналы аналогового характера, в соответствии с исполнением регулятора 2 по возмущению. При поступлении на вход объекта -1 управления возмущающего воздействия Д происходит некоторое изменение по 46 казателей критериев качества ф . При этом, если изменение какого-либо показателя . качества выходит за рамки допустимых пределов, то на выходе соответствующего узла опенки качеств 5 по5шится сигнал, который подается на вход дешифратора 9 корректора 4. Возмущающее воздействие Д подается также на первый вход модели 6 объекта управления, в которой происходит изменение идентичного показателя качества, также как и в объекте 1 управления. На дешифратор 9 может подаваться одновременно ряд сигналов с узлов 5 оценки качеств, свидетельствующих о наличии выходов,значений соответствующих показателей качеств за допустимые пределы. Подаваемьге на дешифратор 9 сигналы дешифрируются и подаются на блок 10 приоритета, с которого сигналы, согласно правилу регулирования (приоритетности регулирования) показателей, подаются на узлы 11 поиска оптимального воздействия. Каждый из узлов 11 поиска оптимального, воздействия, работающий по методу . случайного поиска, подаёт ряд управляющих сигналов на вторую группу входов модели 6 объекта управления. Каждый из управляющих сигналов, подаваемых на модель 6, оценивается моделью 6 объекта управления с точки зрения влияния его на соответствующий показатель качества или группу показателей. При этом, если управляющий сигнал не влечет за собой повышения показателя критерия качества, то в этом случае на выходе соответствующего узла 7 формирования знака производ ой сигнал отсутствует и на соответствующем выходе узла 8 оценки регулирующих воздействий сигнал будет отсутствовать, что вызовет дальнейшую работу узла 11 поиска оптимального воздействия и подачу очередных управляющих сигналов на соответствующие вторые входы модели б объекта управления. При отыскании, узлом 11 поиска оптимального управляющего воздействия сигнала, подача которого на вход модели 6 объекта управления вызовет возвращение показателя критерия качества в заданные рамки, на выходе соответствующего узла 5 оценки качеств исчезает сигнал, подаваемый на вход дешифратора О, ипоявится сигнал на выходе соответствующего узла 7 формирования знсша производной и соответствую
щём выходе узла 8 оценки управляющих воадействий.
Прекращение подачи сигнала на вход дешифратора 9 от узла 5 оценки каЧества и подача сигнала от выхода узла 8 оценки управлшощих воздействий приведет к тому, что прекратится работа узла 1 поиска оптимального управляющего воз действия, на его выходе фиксируется необходимый для даНног $ возмущающего воздействия управляющий сигнал, на втором выходе модели 6 объекта управления появится разрешающий сигнал, который разрешит подачу преобразованного функциональным преобразователем в требуемую форму управляющего воздействия на регулятор 2 от соответствущего узла 11 поиска оптимального управляюШёго воздействия.
После отыскания оптимального управляющегр воздействия, необходимого для регулирования показателя качества старшего по приоритету, блок 10 приоритета включает в работу последующий узел 11 поиска оптимального управляющего воздействия для регулирования очередного показателя качества, В этом случае следует отметить, что могут регулироваться как отдельные одиночные псжазатели качества так и: группа их. Если при регулировании показателя качества младшего приоритета произойдет выход за допустимые рамки велйчинь показателя качества старшего приоритета, то через блок 10 приоритета произойдет переключение от регулирования показателя младшего приоритета к регулированию показателя старшего приоритета.
Таким образом цель изобретения достигается благодаря анализу апостериорной информации о процессе управления, которая накапливается в узлах 11 поиска оптимального управляющего воздействия, анализируется и на основе выдается требуемое решение.
Применение системы Возможно и при наличии априорной информации (полной или частичной). В этом случае возможно при незначительных дополнительных изменениях в схеме произвести ввод априорной информации в узлы 11 поиска оптимального воздействия Г прй йе И;зтйбн11Ом принципе работы системы осуществлять процесс управления. Формула изобретения
1. Система экстремального управления, содержащая корректор, первые выхо,,....., , , / . ; . , ; .
ды которого соединены со входами регулятора по возмущению, выходы которого соединены со входами объекта, отличающаяся тем, что, с целью расширения функциональных возможностей и области применения систем она дополнительно содержит блок определения характеристик объекта, первые входы которого соединены с выходами объекта, вторые - со вторыми выходами ,корректора, а третий вход - со вторым выходом регулятора по возмущению, первые, вторые и третий выходы соединены соответственно с первыми, вторыми и третьим входами корректора.
2. Система по п. 1, отличающ а,я с я тем, что блок определения характеристик объекта содержит модель объекта управления, узлы формирования знака производной, узел оценки регулирующих воздействий, узлы оценки качеств, первые входы которых подключены к первым входам блока определения характеристик, вторые входы соединены соответственно с первыми выходами модели объекта управления и первыми входами узлов формирования знака производной, первый вход модели объекта управления Подключен к третьему входу блока определения характеристик объекта, вторые входы - ко вторым входам блока определения характеристик объекта, второй выход - к третьему выходу блока определения характеристик объекта, выходы узлов оценки качеств подсоединены к первым выходам блока определения характеристик объекта, выходы узлов формирования знака производной соединены соответственно со входами узла оценки регулирующих; воздействий, выходы которого подключены ко вторым вьгходам блока определения характеристик объекта, и тем, что корректор содержит дешифратор, блок приоритета, узлй поиска оптимального воздействия, функциональный преобразователь, выход которого подключен к первому выходу корректора, первый вход подалючен к третьему входу корректора а остальные входы соединены с выходами узлов поиска оптимального управляющего воздействия и со вторыми выходами корректора, первые входы узлов поиска оптимального воздействия подсоединены ко вторым входам корректора, вторые входы соединены с выходами блока приоритета, входы которого соединешз с выходами дешифратора, входы
9
которого подключены к первым входам корректора.
Источники информации, принятые во внимание при экспертизе
1. Патент QUA № 3828171, кл. Q-05 В 15/02,06.08.74.
10
651314
2.Патент Франции № 2061646, Kn.q05 В 11/OO,Q05B 15/ОО, 30.07.71.
3.Авторское свидетельство СССР № 387338, кл.Ч О5 В 13/02,
21.06.73.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимизации управления непосредственно и косвенно управляемыми объектами | 1982 |
|
SU1080117A1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2304298C2 |
| Устройство для адаптивного управления технологическим процессом | 1983 |
|
SU1242911A1 |
| Устройство для определения товарной сортности табачного сырья | 1984 |
|
SU1275287A1 |
| Датчик сил упругой деформации механизма и устройство для его настройки | 1985 |
|
SU1288511A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОКАНАЛЬНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМОЙ | 2009 |
|
RU2395831C1 |
| Устройство для контроля параметров функционирования сложных технических объектов | 1977 |
|
SU690448A1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2578630C2 |
| Двухкаскадное устройство для ранговой фильтрации | 1985 |
|
SU1304036A1 |
| СПОСОБ АДАПТИВНОЙ АВТОМАТИЧЕСКОЙ САМОНАСТРОЙКИ МНОГОПАРАМЕТРИЧЕСКИХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОПТИМАЛЬНЫЕ УСЛОВИЯ | 2000 |
|
RU2189069C2 |
