1
Изобретение относится к системам автоматического управления и регулирования может быть использовано при иостроении многомерных экстремальных регуляторов с инерционными объектами регулирования и при применении счетно-решающего прибора для вычисления управляющего воздействия на многомерный регулятор, организующий движение в экстремум.
Известны системы для экстремального регулирования rt-мерных инерционных объектов, содержащие последовательно соединенные вычислительное устройство и первый коммутатор, каждый выход которого через соответствующее исполнительное устройство подключен к лервому входу одного из л сумматоров, вторые входы которых соединены с соответствующими выходами генератора поисковых колебаний, а выходы - с соответствующими входами объекта, второй коммутатор, вход которого соединен с выходом объекта, и генератор тактовых сигналов, первый и второй выходы которого Подключены соответственно ко Входу генератора поисковых колебаний и другому входу первого коммутатора.
В случае, когда конструкция объекта регулирования не (позволяет получить для организации Движения значе 1ие фушсции, имеющей Экстремум, в известных системах используют функцию, связанную с ней через липейный
дифференциальный оператор с неизвестным переменным коэффициентом, и воспроизводящую функцию, имеющую экстремум, с некоторым запаздыванием, обусловленным инерционпостью объекта регулирования.
Такое положение значительно ухудщает качество процесса регулирования и затрудняет коррекцию в многомерном экстремальном регуляторе.
Цель изобретения - повышение качества регулирования многомерных экстремальных регуляторов с инерционными объектами регулирования.
Для этого в предлагаемой системе определяются частные производные безынерционной характеристики многомерного инерциоиного объекта регулирования, имеющей экстремум, и уже (ПО ним организуется движение в экстремум. С этой целью другой вход второго коммутатора соединен с третьим выходом генератора тактовых сигналов, а каждый выход второго коммутатора - с соответствующим входом вычислительного устройства.
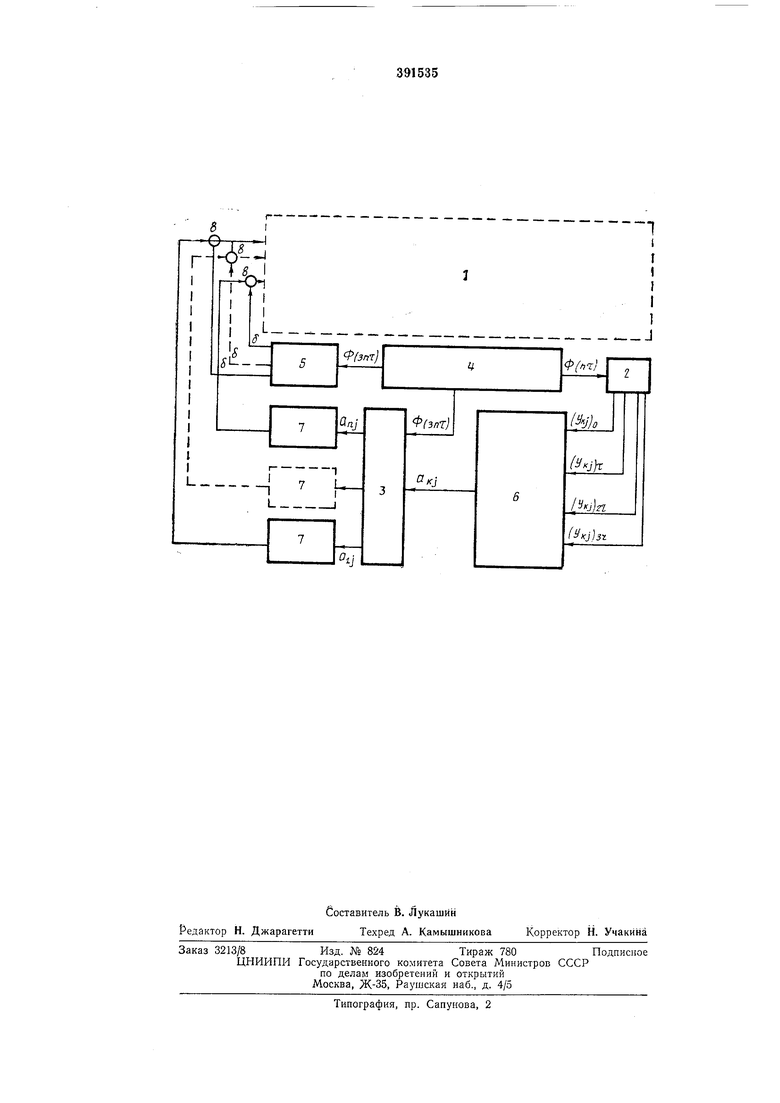
На чертеже представлена блок-схема описываемой системы.
Она содержит объект регулирования 1, коммутаторы 2 и 3, генератор тактовых сигналов 4, генератор поисковых колебаний 5, вычислительное устройство 6, исполнительные устройства 7 и сумматоры 8.
Система работает следующим образом.
Генератор 5 по команде от генератора 4 дает приращение аргументу Х на величину б. Коммутатор 2 по команде от генератора 4 через интервал времени т падает последовательное значение выходной величины у объекта регулирования на входы вычислительного устройства 6 (УЦ)О , (yiij). , ft/kjjZT, (.. По этим значения ykj вычислительное устройство определяет частную производную безынерционной характеристики объекта F(xi,...Xn) по аргументу KI-fli,- и через коммутатор 3 по команде от генератора 4 значение aij подается на вход исполнительного устройства первого канала.
Величина Xj изменяется исполнительным устройством в направлении ее экстремального значения. Затем это команде генератора 4 тенератор 5 дает приращение аргументу ,Г2 на величину б. Коммутатор 2 по команде от генератора 4 выдает через интервал t значение величины у последовательно к четырем входам вычислительного устройства 6.
По значениям у вычислительное устройство определяет частную производную безынерционной характеристики по аргументу и через коммутатор 3 ino команде от генератора 4 значение подается на вход исполнительного устройства второго канала и т. д.
Также определяются и вводятся в исполнительные устройства все частные производные от uij до unj. Затем цикл определения производных повторяется снова с х-. Процесс регулирования продолжается до равенства нулю всех значений , где k - номер аргумента, по которому определяется частная производная, / - номер цикла определения производных.
Таким образом, определение частной производной осуществляется за один шаг длительностью е, который состоит из трех тактов длительностью т каждый.
Определение всех частных производных производится за цикл Ф ге 3лт, где , 2,... Управление генератором поисковых колебаний осуществляется последовательностью импульсов с периодом 3-г.
Исполнительные устройства должны обеспечивать запоминание значений ац в течение времени п s.
Генератор тактовых сигналов выдает две последовательности синхронных и синфазных импульсов с периодами т и 3т и может быть выполнен на -ста билизированном кварцем задающем генераторе с последующей схемой формирования и делителями.
Предмет изобретения
Система для экстремального регулирования
я-мерных инерционных объектов, содержащая последовательно соединенные вычислительное устройство и первый коммутатор, выход которого через соответствующее исполнительное устройство подключен к первому входу одного из «-сумматоров, вторые входы которых соединены с соответствующими выходами генератора поисковых колебаний, а выходы - с соответствующими входами объекта, второй коммутатор, вход которого соединен с
выходом объекта, и генератор тактовых сигналов, первый и второй выходы которого подключены соответственно ко входу генератора поисковых колебаний и другому входу первого коммутатора, отличающаяся тем, что, с целью
повышения качества регулирования системы, другой вход второго коммутатора соединен с третьим выходом генератора тактовых сигналов, а каждый выход второго коммутатора - с соответствующим входом .вычислительного
устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поиска экстремума функционала входных сигналов инерционного объекта | 1981 |
|
SU978100A1 |
| МНОГОМЕРНАЯ СИСТЕМА ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ С НЕЗ.ЛВИСИМЫМ ПОИСКОМ | 1971 |
|
SU423099A1 |
| Система экстремального регулирования многомерных инерционных объектов | 1977 |
|
SU661506A1 |
| Многоканальный непрерывно-шаговыйэКСТРЕМАльНый РЕгуляТОР | 1978 |
|
SU813357A1 |
| Идентификатор многомерных объектов | 1984 |
|
SU1215086A1 |
| Экстремальный регулятор | 1978 |
|
SU744452A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| Система экстремального регулирования | 1989 |
|
SU1640673A1 |
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1979 |
|
SU792218A1 |
| Система экстремального регулированияОдНОМЕРНыХ иНЕРциОННыХ Об'ЕКТОВ | 1979 |
|
SU824129A1 |