Изобретение относится к вычислительной технике и может быть использовано при моделировании для определения характеристик нелинейных динамических систем.
Цель изобретения - повьшение точности и упрощение устройства.
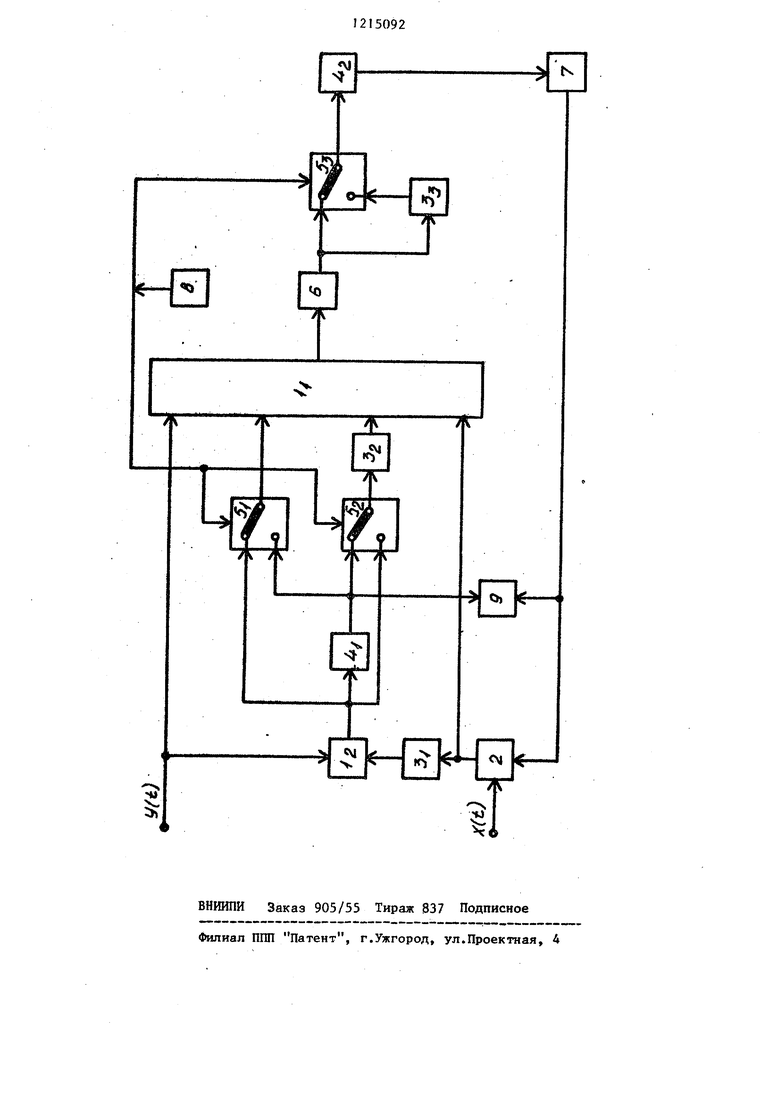
На чертеже изображена структурная схема устройства.
Устройство для определения коэффициентов статистической линеаризации нелинейных динамических систем содержит сумматоры 1, и 1, усилитель 2 с регулируемым коэффициентом усиления, инверторы 3, Sg и Зд, блоки усреднения 4, и 4, коммутаторы 5, 5g и 5, , квадратор 6, усилитель напряжения 7, генератор 8 тактовых импульсов и блок регистрации 9
Согласно теории статистической линеаризации нелинейная динамическая система может быть линеаризована функцией вида:
и (t)cp+kx(t),
где U(t) - аппроксимирующая случайная функция на выходе модели нелинейной динамической системы;
tf статистическая харакТерис тика нелинейной динамичес кой системы по математи- часк.ому ожиданиюJ
k - эквивалентный статистичес кий коэффициент усиления нелинейной динамической системы по случайной составляющей.
Коэффициенты статистической линеаризации С| и k определяются по фор1215092 2
Входной сигнал y(t) поступает на первые входы сумма.торов, а случайный сигнал x(t) - на информационный вход усилителя 2 с регулируе- 5 мым коэффициентом усиления, с выхода которого сигнал U.k(t) x(t) поступает на второй вход сумматора 1) и через инвертор 3, на второй вход сумматора 1 (k(t) - коэффици- 10 ент усиления усилителя 2).
На выходе сумматора Ig имеется сигнал:
25
35
U,y(t)-k(t).x(t),
(3)
15 на выходе блока усреднения 4, сигнал
U,(t)-k(t).-x(t)j, (4)
.которые поступают на информационные 20 входы коммутаторов 5 и Sg.
В момент, когда коммутаторы 5( , Sg и 5 находятся в положении, как показано на чертеже, на выходе сумматора 1J имеется сигнал:
j
U.y(t)+k(t).x{t)+U -и
(5)
30
выходе квадратора 6 и па входе, блока усреднения 4 сигнал:
,
Б момент, когда коммутаторы 5,, 5 и 5j находятся в положении, противоположном изображенному на чертеже э на выходе сумматора 1 ( имеется сигнал:
(t)+k(t) x(t)-(),(6) на выходе квадратора 6 и на входе блока усреднения 4, сигнал: U,U,.
.i Ь
Генератор тактовых импульсов
0 8, осуществляя принцип временного разделения сигналов, формирует на входе блока усреднения 4 переменный сигнал, имеющий форму : меанд- ра, амплитуда положительных иммуле:
((t)-kx(t)j,
1,|мШК)Г.
(О
(2)
(t)J
де x{t) - случайная функция на входе реальной нелинейной динамической системы и ее модели;
y(t) - случайная функция на выходе реальной нелинейной динамической системы-, М - математическое ожидание, у I tti ( )- центрированные случайные
функции.
Устройство работает следующим обазом.
U,y(t)-k(t).x(t),
(3)
15 на выходе блока усреднения 4, сигнал
U,(t)-k(t).-x(t)j, (4)
.которые поступают на информационные входы коммутаторов 5 и Sg.
В момент, когда коммутаторы 5( , Sg и 5 находятся в положении, как показано на чертеже, на выходе сумматора 1J имеется сигнал:
j
U.y(t)+k(t).x{t)+U -и
(5)
выходе квадратора 6 и па входе, блока усреднения 4 сигнал:
,
Б момент, когда коммутаторы 5,, 5 и 5j находятся в положении, противоположном изображенному на чертеже э на выходе сумматора 1 ( имеется сигнал:
(t)+k(t) x(t)-(),(6) на выходе квадратора 6 и на входе блока усреднения 4, сигнал: U,U,.
.i Ь
Генератор тактовых импульсов
8, осуществляя принцип временного разделения сигналов, формирует на входе блока усреднения 4 переменный сигнал, имеющий форму : меанд- ра, амплитуда положительных импульсов которого равна Ug-, а отрицательных - {-Uy). На выходе блока усреднения есть сигнал Ug, пропорциональный оценке математического ожидания поступающего на
его вход переменного сигнала, который через усилитель 7 поступает на управляющий вход усилителя 2 с гулируемым коэффициентом усиления, у которого изменяется коэффициент
усиления k(t) до тех пор, пока на выходе блока усреднения 4 не будет установившийся сигнал. При этом оценкой параметра ср является сигнал
Uj с выхода блока усреднения 4, а оценкой параметра k - коэффициент усиления усилителя 2 k(t).
Повышение точности устройства обеспечивается в результате исключения влияния погрешности нелинейного элемента (блока умножения, квадратора) на определение коэффициентов статистической линеаризации..
Формула изобретени
Устройство для определения коэффициентов статистической линеаризации нелинейных динамических систем, содержащее первый и второй сумматоры, первые входы которых соединены с первым входом устройства, усилитель с регулируемым .коэффициентом усиления, информационный вход которого соединен с вторым входом устройства, а выход - непосредственно с вторым входом первого сумматора и через первый инвертор - с вторым входом второго сумматора, первый блок усреднения, вход КОТОРОГО соединен с выходом второго сумматора, второй инвертор, последовательно соединенные второй блок усреднения и усилитель напряжения, выход которого подключен к управля2I5092.4
ющему входу усилителя с регулируемым коэффициентом усиления, выход первого блока усреднения и выход усилителя напряжения подключены со- 5 ответственно к первому и второму входам блока регистрации, отличающееся тем, что, с целью повьшения точности и упрощения устройства, в него введены квадратор.
третий инвертор, три коммутатора и генератор тактовых импульсов,- подключенный выходом к управляющим входам коммутаторов, информационные первый и второй входы первого
коммутатора подкл«Гчены соответственно к выходам второго сумматора и первого блока усреднения, а выход - к третьему входу первого сумматора, информационные первый и второй
входы второго коммутатора подключены соответственно к выходам первого блока усреднения и второго сумматора, а выход через второй инвертор- к четвертому входу первого сумматора, вход квадратора подключен к выходу первого сумматора, а выход - непосредственно к первому информационному входу и через третий инвертор - к второму информационному
входу третьего коммутатора, выход которого соединен с входом второго блока усреднения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения коэффициентов статистической линеаризации нелинейных динамических систем | 1986 |
|
SU1322329A1 |
| Устройство для определения коэффициентов статистической линеаризации нелинейных динамических систем | 1985 |
|
SU1262538A1 |
| Устройство для определения коэффициентов статистической линеаризации нелинейных динамических систем | 1985 |
|
SU1262537A1 |
| Устройство для нормирования случайного процесса | 1981 |
|
SU1001123A1 |
| Устройство для определения формы случайного сигнала | 1983 |
|
SU1109768A1 |
| Устройство для оценки отношения корреляционных моментов | 1984 |
|
SU1164741A1 |
| Устройство для определения статистических характеристик случайных процессов | 1986 |
|
SU1310811A1 |
| Устройство для определения корреляционных характеристик случайного процесса | 1984 |
|
SU1164742A1 |
| Устройство для определения статистических характеристик случайных процессов | 1986 |
|
SU1334169A1 |
| Устройство для определения коэффициента изменчивости случайного процесса | 1980 |
|
SU934507A1 |
Изобретение относится к области вычислительной техники и может быть использовано для определения статистических характеристик нелинейных динамических систем. Цель изобретения - повышение точности и упрощение устройства, что достигается введением трех коммутаторов, генератора тактовых импульсов, квадратора и инвертора. Новые элементы и связи позволяют повысить точность устройства за счет исключения влияния погрешности нелине,;- ных элементов. 1 ил.
ВНИИПИ Заказ 905/55 Тираж 837 Подписное Филиал ППП Патент, г.Ужгород, ул.Проектная, 4
| Казаков И.Е | |||
| Доступов В.Г | |||
| Статистическая динамика нелинейных автоматических систем | |||
| ФМГ, 1962, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
| Устройство для статического моделирования | 1975 |
|
SU548867A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Р,-П.П.Жилинскас | |||
| Измерители отношения | |||
| - М.: Сов | |||
| радио, 1975, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
