Для отмеривания доз материалов в автоматизироваииых производственных процессах нрименяют весовые дозирующне устройства с пснользованием циферблатной указательной головки. Программное устройство такого дозатора выиолнеио в виде ряда электромагнитных датчиков, расноложеиных по окружности наборного диска на расстоянии, соответствующем цене деления головки. Недостаток известных устройств состоит в том, что они не обеспечиваюг независимость веса отмериваемой дозы от веса тары.
Для устранения указанного недостатка предлагается программное устройство связывать со стрелкой весовой циферблатной головки электромагнитной муфтой, включаемой лишь на время набора материала.
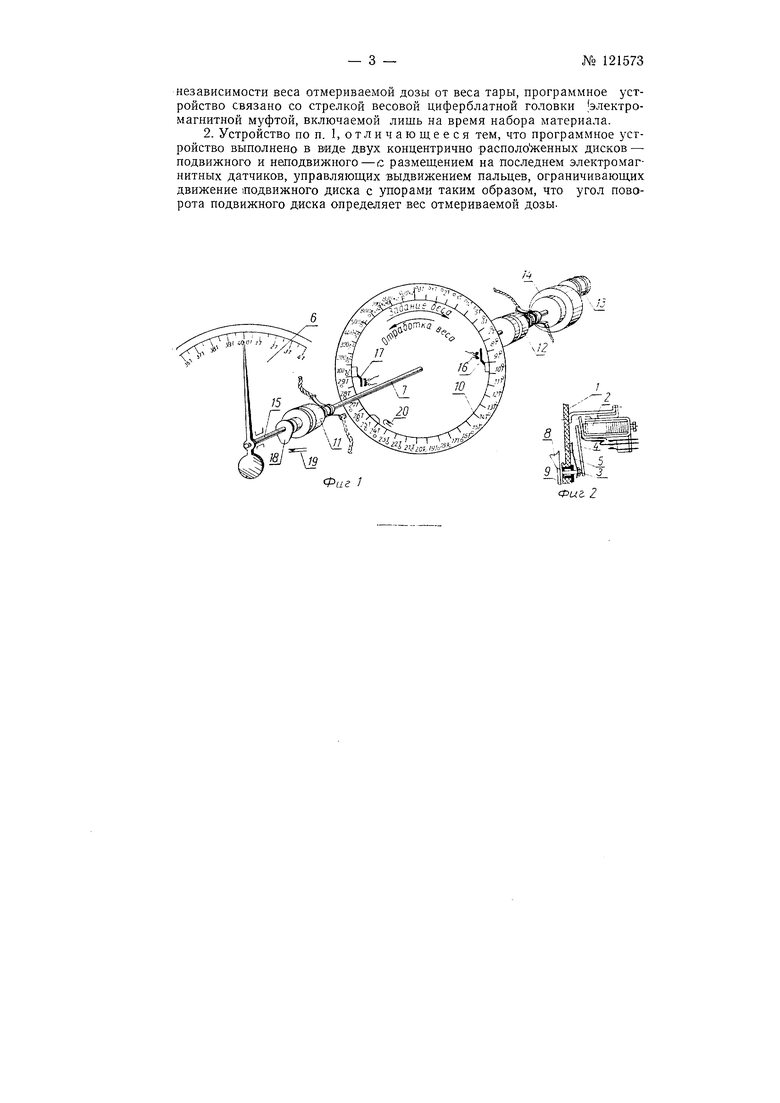
На фиг. 1 изображена кинематическая схема предлагаемого устройства; на фиг. 2 - схема реле, установленных на его задаюилем электрокоитактном диске.
Дозатор содержит задаюидее электроконтактное устройство, приводимое во вращение электродвигателем, н стандартную весовую циферблатную головку, несвязанные при задании дозы и сочленяемые во время набора материала. Задающее устройство выполнено в виде двух ди;сков. На неподвижном диске 1 укреплены по окружности ряд реле 2 для точного и трубого набора. Реле 2 используются в качестве электромагнитов для управления упорными пальцами 3. На якорях реле укреплены рычаги 4, которые с помощью возвратных пружин 5 упорных пальцев отведены в нсходное ноложеиие, соответствующее невозбужденному состоянию реле. Упорные пальцы грубого набора расположены на диске J таким образом, что угол между двумя соседними пальцами соответствует одной тонне на циферблате указательнорегистрирующего прибора 6. Упорные пальцы точного набора расположены так, что угол между соседними пальцами соответствует 1100 кг по
№ 121573- 2 -
шкале прибора 6. В центре диска / проходит ось 7 второго диска 8. На подвижном диске 5 установлен один упор 9 грубого набора и ряд упоров 10 точного набора, расположенных с шагом, соответствуюш,им одной тонне. Диск 8 с помошью электромагнитных муфт 11 и 12 подключается либо к приводному электродвигателю 13 через редуктор 14, либо к оси 15 стрелки указательно-регистрирующего прибора 6. На диске 8 укреплены шунты 16 индуктивного датчика окончания набора и /7 - индуктивного датчика предварения набора материала. На оси весовой стрелки установлен кулачок 18, воздействующий на контакт 19 при порожних весах, когда весовая стрелка находится в нулевом положении.
Предлагаемое устройство работает следующим образом.
При наборе очередной компоненты шихты подается электрический импульс на катушку одного из реле грубого набора, соответствующего заданному количеству тонн. При этом якорь реле притягивается к сердечнику и рычагом 4 выталкивается палец грубого набора. Одновременно контактная группа рел& подает команду на включение приводного электродвигателя и возбуждение электромагнитной муфты 12, вследствие чего диск 8 поворачивается на угол, соответствующий заданному по программе количес ву тонн. ПрИ контактировании упора грубого пабора с выдвинутым пальцем 3 фиксируется окончание грубого набора и задающее устройство подает напряжение на катушку реле точного набора, соответствующее заданным программой сотням кг. При этом реле точного набора выталкивает соответствующий палец точного набора и поворачивается до тех пор, пока ближайщий к выдвинутому пальцу упор не упрется в палец 3. Дополнительный угол поворота задающего диска 8 будет соответствовать точному заданию дозы.
Задание точного набора принципиально пе отличается от задания грубого забора. Кслструктивное различие между ними (наличие нескольких упоров точного набора на задающем диске и только одного упора грубого набора) объясняется тем, что па угле поворота, соответствующем 1 7 невозможно разместить большое количество реле с интервалом в 100 кг. Поэтому пальцы точного набора разнесены на большем угле с интервалом 1000 кг между ними и против каждого из них установлен упор 10. По окончании задания веса электродвигатель и электромагнитная муфта 12 отключаются и возбуждается электромагнитная муфта //, соединяющая задающий диск .с осью стрелки указательно-регистрирующего прибора 6. При наборе веса происходит вращение оси стрелки указательно-регистрирующего прибора 6 и вместе с ней возвращается в исходное положение задающий диск 8. При наборе веса на 0,5 т менее заданного щунт 16 оказывается против индуктивного датчика предварения набора и подается команда на перевод загрузочного устройства в режим досыпки. При достижении заданного веса щунт 17 оказывается против датчика окончания набора и подается команда на прекращение набора. В случае несрабатывания индуктивных датчиков загрузочное устройство останавливается аварийным контактом 20, который размыкается кулачком задающего диска при переборе дозы на 0,5 г.
Предмет изобретения
1. Весовое дозирующее устройство с использованием циферблатной указательной головки, программное устройство которого выполнено в виде ряда электромагнитных датчиков, расположенных по окружности наборного диска на расстоянии, соответствующем цене деления циферблатной указательной головки, отличающееся тем, что, с целью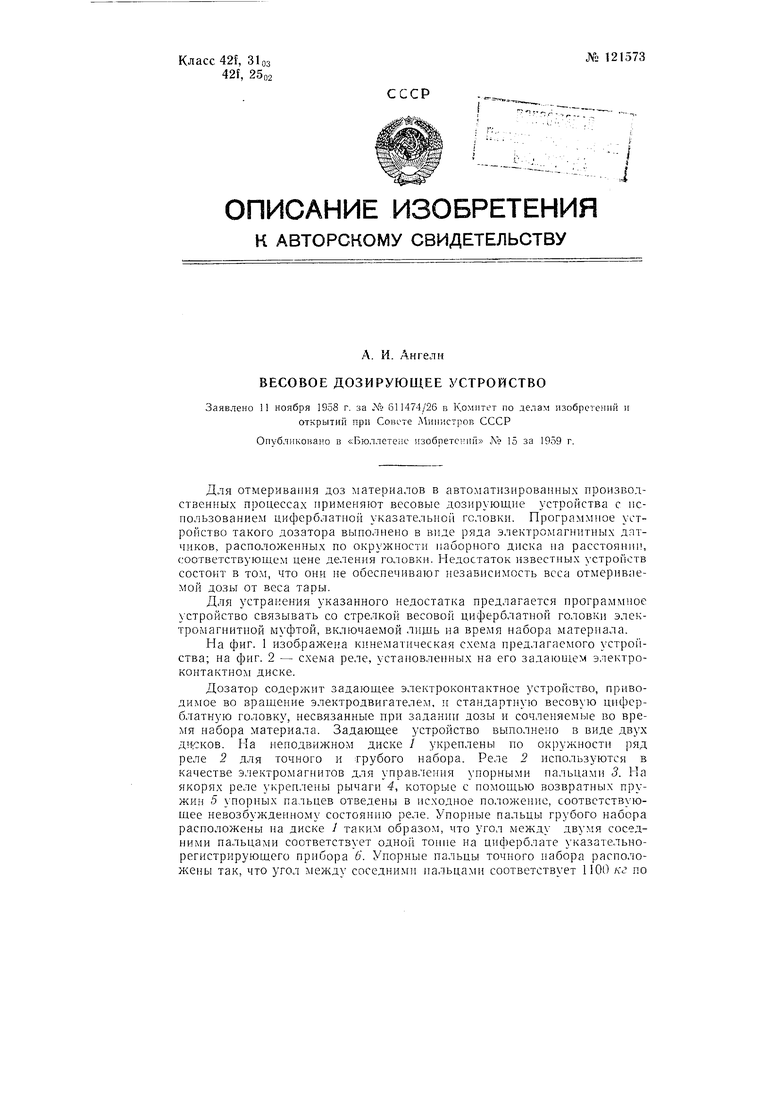
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСТАНЦИОННЫЙ МНОГОКОМПОНЕНТНЫЙ ВЕСОВОЙДОЗАТОР | 1967 |
|
SU198718A1 |
| Весы для взвешивания слитков | 1959 |
|
SU131917A1 |
| Программирующее устройство углезагрузочных самоходных вагон-весов | 1960 |
|
SU148091A1 |
| ПАТЕИТЙО-ТЕХННЧССНДЙБИБЛИОТЕКАА. И. Ангели | 1972 |
|
SU337659A1 |
| Задающее устройство | 1978 |
|
SU734508A1 |
| Устройство управления весовым порционным дозированием | 1975 |
|
SU566143A1 |
| Дозатор | 1983 |
|
SU1117456A1 |
| Устройство для дистанционного управления дозированием и автоматической записью результатов взвешивания | 1973 |
|
SU478197A1 |
| Автоматический дозатор | 1976 |
|
SU591717A1 |
| СИСТЕМА ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ | 1967 |
|
SU222491A1 |