Изобретение относится к области подъемно-транспортного машиностроения, в частности к приводам подъемников.
Цель изобретения - увеличение производительности привода путем повышения его тяговой способности.
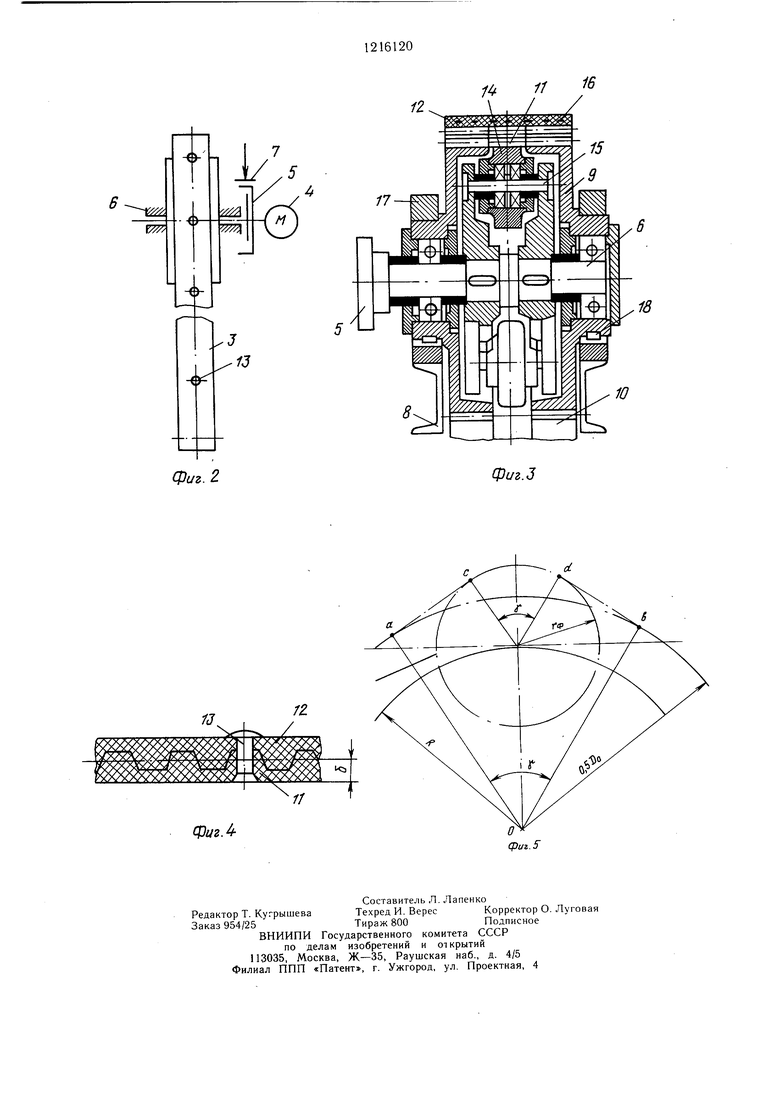
На фиг. 1 изображен подъемник, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - привод, поперечный разрез; на фиг. 4 - гибкая связь, продольный разрез; на фиг. 5 - кинематика взаимодействия элементов привода.
Привод подъемника содержит шкив 1 обката с многороликовым водилом 2, охваченным гибкой тяговой связью 3, соединенной с подъемным сосудом (Grp) и проти- вовесом (Gnp), приводной двигатель 4, связанный муфтой 5 с ведущим валом б,, на котором установлено водило 2, и механический тормоз 7. Все узлы привода установлены на опорной балке 8.
Шкив 2 обката состоит из двух соос- ных зубчатых дисков 9, а гибкая связь представляет собой бесконечный зубчатый ремень 10, состоящий из двух слоев. Причем узкий внутренний слой 11 входит своими зубьями во впадины широкой наружной ветви 12 того же ремня 10. Эти ветви соединены между собой, например, заклепками 13.
Слой ремня 11 гладкой тыльной частью контактирует с роликами 14 водила 2 размещенными на осях 15. Слой ремня 12 своими зубьями контактирует с зубьями дисков 9, Зубчатый ремень 10 армирован стальными тросами 16.
Зубчатые диски 9 зафиксированы в опорах 17 посредством шпонок 18.
Привод подъемника работает следую- щим образом.
При вращении многороликового водила 2 против часовой стрелки с угловой частотой П1 в гибкой тяговой связи 3 возникает волна упругой деформации, которая заставляет ее медленно перекатываться по шки- ву 1 обката с зацеплением соосных зубчатых дисков 9 и наружной ветви 12 зуб
чатого ремня. Внутренний слой 11 синхронно перемещается с наружной ветвью за счет зубчатого зацепления между ними и взаимодействует с роликами 14 водила 2. Таким образом происходит подъем груза и опускание противовеса.
Скорость перемещения гибкой связи (груза) находится из следующих соображений.
За один оборот водила гибкая связь 3 перемещается на расстояние
Лсв 1-Л-7-Я т,
гдеi- число роликов 14 водила 2; AZ - разность числа зубьев в периметре acdb и опорной дуге обката аЬ (фиг. 5), т.е.
AZ я - Роб
л-т
где n acdb; Doe ab - величины, зависящие от радиуса R окружности центров вращения роликов; диаметра DO начальной окружности соосных дисков 9; угла обхвата 7 гибкой связью этих дисков в зоне одного ролика и фиктивного радиуса ролика ГФ, который находится из выражения
гф г + S,
где г - фактический радиус ролика (фиг. 1);
б-условная толщина ремня (фиг. 4).
Величина AZ может быть только целым числом (,2,...,3).
Скорость подъема (опускания) груза находится из очевидного выражения
или
9гр Дсв П1, Эгр 1-П| л-т-л Z-10 ,
где П1 - угловая частота вращения водила,
об/мин; ш - модуль зацепления, мм.
/ // . /2. /
с I
ssgagi3SsgeSKEss35
. 2
фиг.З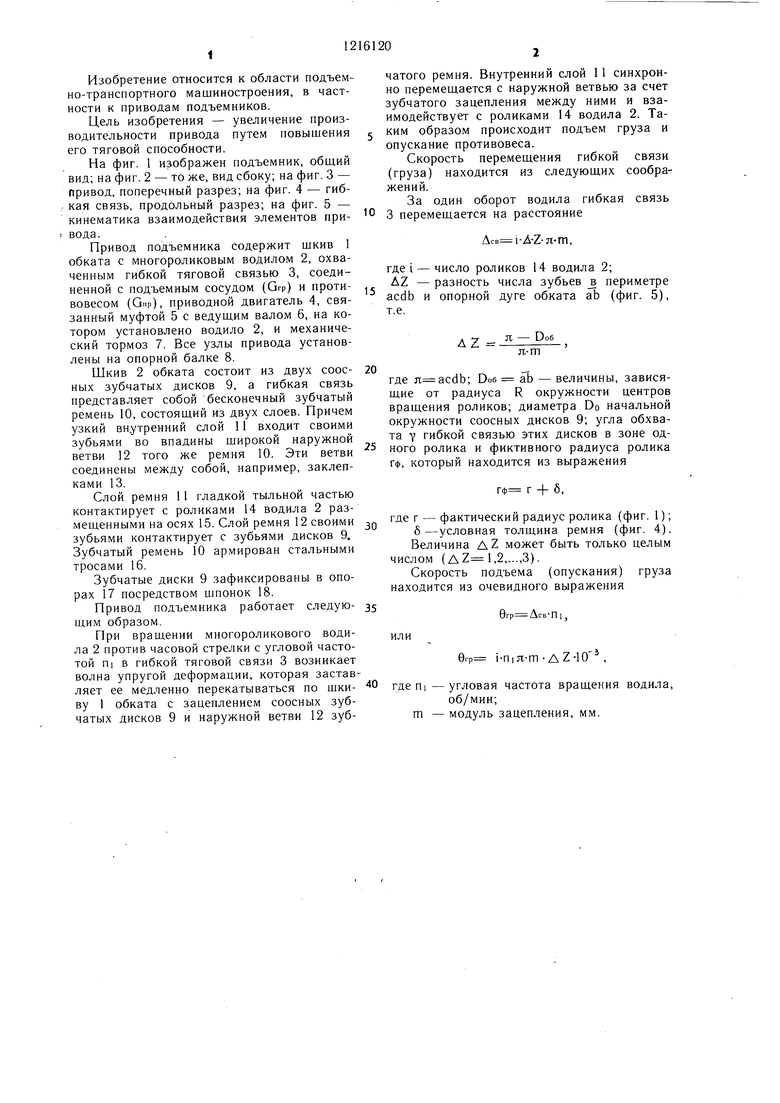
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод подъемника | 1981 |
|
SU992379A1 |
| Волновой вариатор скорости для привода двухвалковой дробилки | 1980 |
|
SU933108A1 |
| Волновая ременная передача | 1979 |
|
SU898183A1 |
| Привод шпинделя для вибрационного резания | 1980 |
|
SU933293A1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| ВОЛНОВАЯ НЕСООСНАЯ ПЕРЕДАЧА | 1995 |
|
RU2092728C1 |
| Конвейер | 1990 |
|
SU1751100A1 |
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1989 |
|
SU1664672A2 |
| Волновой вариатор скорости | 1979 |
|
SU870804A1 |
| ПРИВОДЫ С ПОСТОЯННОЙ ЛИНЕЙНОЙ СКОРОСТЬЮ ЛОПАСТЕЙ ДЛЯ ЦИКЛОИДНЫХ РОТОРОВ И ГРЕБНЫХ ПРОПЕЛЛЕРОВ С НЕКРУГОВЫМИ ОРБИТАМИ | 2024 |
|
RU2828914C1 |
Фиг.
. d
Составитель л. Лапенко
Редактор Т КугрышеваТехред И. ВересКорректор О. Луговая
Заказ 954/25Тираж 800Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патеит, г. Ужгород, ул. Проектная, 4
| Привод подъемника | 1981 |
|
SU992379A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
