12
центра сферического шарнира 5. Кулиса кинематически связана с кривошипом 4, вьтолненным двухколенным со свободным концом в виде цилиндрического стержня, ось которого параллельна оси элемента кривошипа, взаимодействующего с кулисой. Расстояние между осями соприкасающихся цилиндрических поверхностей 9 и 10 толкателей и стержня равно сумме радиусов этих поверхностей. Падающий на зеркало луч отражается от него и образует на рабочем поле световое пятно, перемеИзобретение относится к оптическим системам пространственного углового сканирования и может быть использовано, например, в лазерных устройствах записи гибо считывания информации, технологических устройствах, установках с обработкой лазерным лучом, устройствах наблюдения и ДРУ1 их устройствах, требующих управления направлением световых лучей.
Цель изобретения - повышение точности и быстродействия устройства, а также упрощение конструкции.
На чертеже представлена кинематическая схема предлагаемого устройства.
Устройство содержит корпус 1, зеркало 2, пространственный кулисный механизм, кулиса 3 и кривошип 4 которого связаны с корпусом 1 сферическими шарнирами 5 и 6, координатный механизм с подвижными по двум взаимно перпендикулярным и параллельным плоскости рабочего поля координатам толкателями 7 и 8.
Зеркало 2 связано с кулисой 3 так, что отражакяцая поверхность его перпендикулярна оси кулисы 3 и проходит через центр сферического шарнира 5. Толкатели 7 и 8 каждой координаты имеют цилиндрические поверхности 9 и 10, оси которых параллельны разноименной ходовому элементу координате. Кривошип 4 имеет цилиндрическую поверхность 11, ось которой параллельна оси кривошипа и от16755
щающееся при изменении угла поворота зеркала по линейному закону от управляющих воздействий. Для обеспечения равенства перемещений светового пятна по координатам X и У на рабочем поле привод координатных ходовых элементов выполнен с соблюдением условия равенства отношений величин перемещений толкателей и расстояний от центра сферического шарнира 6 до плоскостей перемещения осей цилиндрических поверхностей толкателей. 1 з.п. ф-лы, 1 ил.
стоит от нее на расстоянии d, определяемом выражением
d где
4i
R, (1)
R, + f+( R,)
радиус цилиндрической поверхности кривошипа;
радиусы цилиндрических поверхностей координатных ходовых элементов.
Цилиндрическая поверхность 11 кривошипа 4 непосредственно сопряжена с цилиндрическими поверхностями 9 и 10 толкателей 7 и 8, например с помощью пружин (не показано);
Ось кривошипа 4 пересекает оси цилиндрических поверхностей 9 и 10 толкателей 7 и 8.
Лут;, подлежащий отклонению (например, луч лазера), направляется на отражающую поверхность зеркала 2 так, что линия падения луча проходит через центры сферических шарниров 5 и 6 кулисы 3 и кривошипа 4.
Для обеспечения равенства перемещений светового пятна по координатам X и У на рабочем поле привод координатных ходовых элементов выполнен с соблюдением условия
Ux Ь,
(2)
4 Ч
величины перемещений толкателей 7 и В соответственно вдоль координат X и У; расстояния от центра сферического шарнира 6 кри- вошипа 4 до плоскостей перемещения осей цилиндрических поверхностей 9 и 10 толкателей 7 и 8 соответственно координат X и У.
Это условие реализуется, например, с помощью винтового привода (не показано) координатных ходовых элементов, шаг винта которых (Ш, ветствует выражению (3)
Ши) соот Ш, ИГ
h,
(3
У У
Устройство работает следующим образом,
Под действием управляющих воздействий толкатели 7 и 8 перемещаются вдоль своих координат и поворачивают кулису 3 с установленным на ней зеркалом вокруг центра сферического шарнира 5.
ПадаЕощий на зеркало луч (линия падения которого проходит через центры сферических шарниров 5 и 6 кулисы 3 и кривошипа 4) отражается от зеркала 2 в соответствии с углом поворота зеркала 2 и попадает на плоскость Н рабочего поля, образуя на ней световое пятно. Изменение угла поворота зеркала 2 приводит к перемещению светового пятна на рабочем поле по линейному закону от управляющих воздействий.
Очевидно, что расстояние между осями соприкасающихся цилиндрических поверхностей равно сумме радиусов этих поверхностей.
Тогда при любых положениях толкателей расстояния от оси цилиндрической поверхности кривошипа до осей цилиндрических поверхностей толкателей будут постоянны. Так как ось ци- линдричес кой поверхности кривошипа параллельна оси кривошипа, то и расстояния между осью кривошипа и осями цилиндрических поверхностей также не изменяются при перемещении толкателей. Причем, если в исходном состоянии ось кривошипа пересекает оси цилиндрических поверхностей толкателей, то и во всех других положениях толкателей ось кривошипа будет пересекать оси цилиндрических поверхностей толкателей.
Отраженный от зеркала 2 луч параллелен оси кривошипа во всех положениях кривошипа, т.е. перемещение лу ,
1216/334
ча (светового пятна) по рабочему лю находится в линейной зависимости от перемещений толкателей.
Предлагаемое устройство по сравне- 5 нию с известным (с учетом того, что привод каретки двухкоординатного механизма известного устройства выполнен за счет исключения из устройства каретки с установленным на ней
10 сферическим злементом, и средств сопряжения их с устройством) позволяет существенно повысить точность, н повторяемость (степень повторения положения луча при многократных за15 даниях его положения равными управляющими воздействиями) управления световым лучом, а также повысить быстродействие и упростить устройство . Повторяемость и точность увели20 чиваются в два раза за счет уненьше- , ния количества сопряжений (имеется в виду непостоянство зазоров в них) в кинематической цепи толкателя до кривошипа с двух по одной координа25 те в известном устройстве до одного т предлагаемом. Точность дополнительно увеличивается в два-три раза за счет уменьшения в кинематических цепях количества сопрягаемых поверх30 ностей (имеется в виду погрешность выполнения каждой сопрягаемой поверхности и изменение размеров в результате износа) с четырех в известном устройстве до двух в предлагаемом.
jr Быстродействие увеличивается в два-три раза за счет исключения массы каретки и установленного на ней сферического элемента из общей подвижной массы устройства, а также за
Q счет исключения сил трения в сопряжениях каретки с координатами ходовыми элементами.
Упрощение устройства состоит в уменьшении количества деталей и личества точно выполняемых поверхностей в сочленении координатного механизма с кривошипом (с семи в известном устройстве до 3-х в предлагаемом) .
50
Формула изобретения
1. Устройство двухкоординатного отклонения луча, содержащее кинема- 55 тически связанные между собой кулису и кривошип, соединенные с корпусом с помощью сферических шарниров, установленное на кулисе перпендикулярно ей зеркало, отражающая поверхность которого совпадает с центром сферического шарнира кулисы, и механизм перемещения кривошипа, содержащий два подвижных по двум взаимно перпендикулярным направлениям .элемента ,.при этом линия падения луча на зеркало совмещена с центрами сферических шарниров кулисы и кривошипа, отличающееся тем,
ТО, с целью повышения Точности и быстродействия, а также упрощения конструкции, кривошип выполнен двухколенным со свободным концом в виде цилиндрического стрежия, а каждый подвижный элемент механизма выполнен в виде толкателя с цилиндрической оабочей поверхностью„ образующая которой параллельна направлению перемещения другого подвижного эле- мента, при.этом ось цилиндрического стержня параллельна оси элемента кривошипа, взаимодействующего с кулисой, и отстоит от нее на расстоя- НИИ с1 , определяемом выражением
Редактор О. Бугир
Составитель в. Дринь
Техред А.Бабинец Корректор S. Сирохман
Заказ 998/57 Тираж 502 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Филиал ППП naTerfT, г. Ужгород, ул. Проектная,
, где R, - радиус поверхности цили1.дрического стержня;
Rj.Rj- радиусы.цилиндрических поверхностей толкателей, а ось элемента кривошипа взаимодействующего с кулисой, проходит через оси цилиндрических поверхностей толкателей.
2. Устройство по п. I, о т л и - чающееся тем, что, с целью обеспечения равенства перемещений светового пятна по координатам X и У, величины перемещений толкателя по оси X-LX и толкателя по. оси У-Ьц и расстояния от центра сферического шарнира кривошипа до плоскостей перемещений осей цилиндрических поверхностей соответственно толкателя по оси X -h J и толкателя по оси у - Ь у выбраны из соотношения
LU П U
- -2
Изобретение относится к оптическим системам пространственного углового сканирования. Целью изобретения является повьшение точности и быстродействия устройства, а также упрощение его конструкции. Под действием, управляющих воздействий толкатели 7 и 8, перемещаясь вдоль своих координат, поворачивают кулису 3 с установленным на ней зеркалом 2 вокруг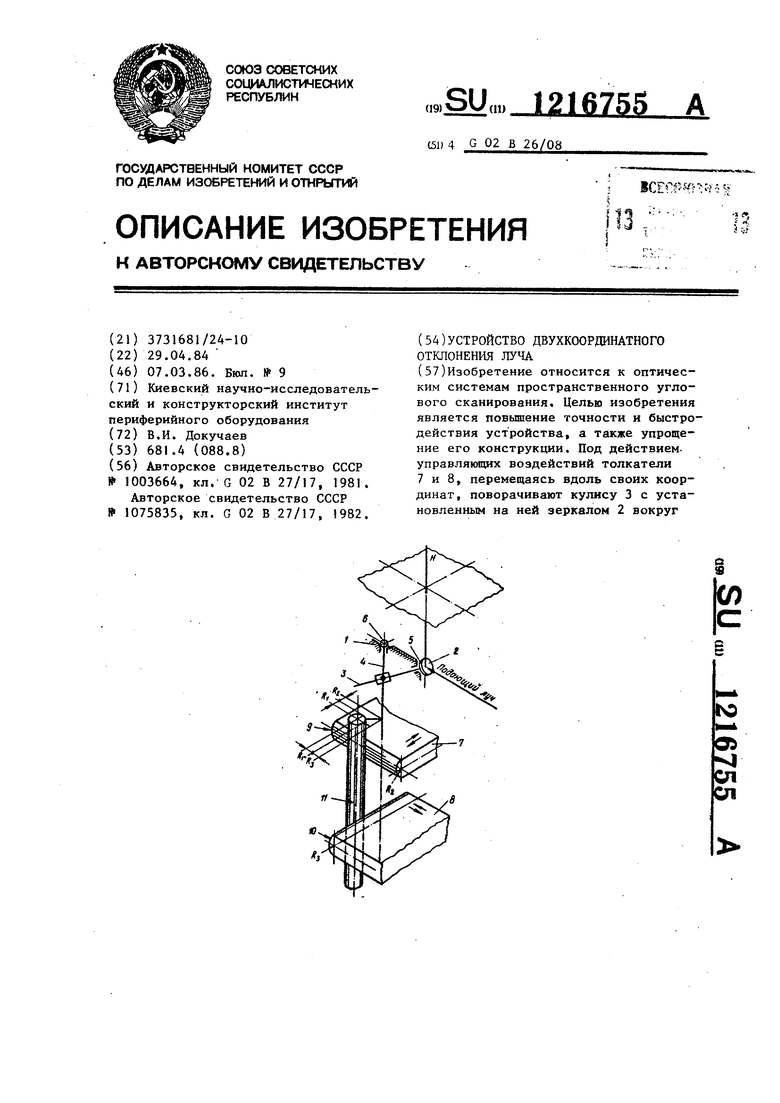
| Авторское свидетельство СССР fr 1003664, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 1075835, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
