Изобретение относится к приборотроению, средствам автоматики и выислительной техники и может найти ирокое применение в установках с истанционным управлением.
Целью изобретения является уменьение момента трения и момента инерии на оси приемника системы.
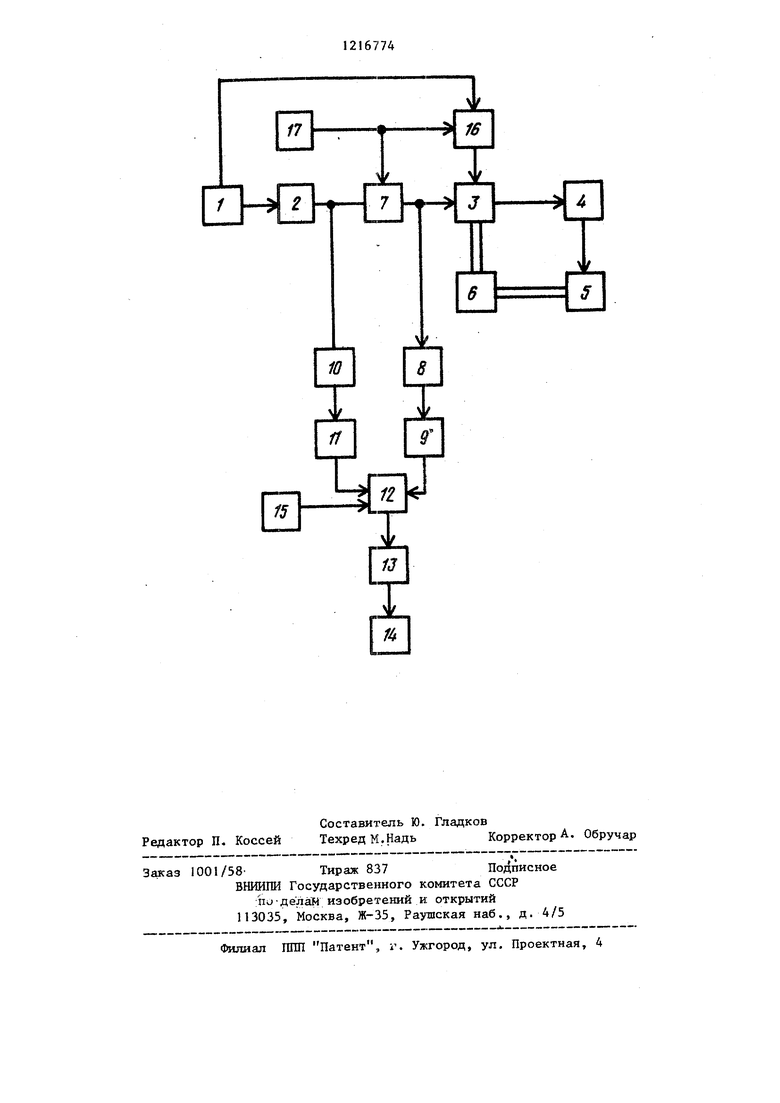
На чертеже изображена структурная схема предлагаемой системы, I
Схема содержит источник 1 переменного тока, датчик 2, приемник 3, ус1щитель 4, электродвигатель 5, редуктор 6, первый коммутатор 7, второй фазосдвигающий блок 8, второй ограничитель 9 напряжения, первый фазосдвигакщий блок 0, первый ограничитель 11 напряжегшя, элемент И 12, счетчик 13, регистрирующий блок 14, первый генератор 15 импульсов, второй коммутатор 16, второй генератор 17 импульсов,
Датчик 2 и приемник 3 представляют собой синусно-косинусные трансформаторы (СКТ), Усилитель 4 обеспечивает усиление выходного сигнала приемника 3 для управлеьшя электродвигателем 5, Электродвигатель 5 и редуктор б могут быть выполнены конструктивно совмещенными и представ- ляют собой унифицированные элементы автоматики и вычислительной техники. Фазосдвигающие блоки 8 и 10 преобразуют напряжение, поступающее с синусной и косинусной обмоток датчика 1 и приемника 3 в напряжение, постоянное по амплитуде и изменяющееся по фазе в зависимости от углов поворота их валов. Конструктивно они могут быть вьшолнены в виде RG-цепочек,
Ограничители I1 и 9 напряжения формируют прямоугольные импульсы в течение полупериодов напряжений, поступающих на их входы с выходов фазосдвигающик блоков 8 и 10, При этом к входам элемента И 12 подключены прямой выход первого ограничителя 11 напряжения и инверсный выход второго ограничителя 9 напряжения, Коммутатор 7 отключает выходную обмотку датчика 2 от входной обмотки приемника 3 при поступлении управляющего сигнала с выхода второго генератора 17 импульсов и представляет собой набор релейных элементов. . Коммутатор 16 при поступлении управляющего сигнала с выхода второго
генератора 17 импульсов подключает к второй (т.е, квадратурной) обмотке приемника 3 выход источника 1 переменного тока,
Второй генератор I7 импульсов генерирует импульсы для периодического включения в работу коммутаторов 7 и 16, Частота импульсов зависит, главным образом, от частоты напряжения на выходе источника 1 переменного тока. Первый генератор 15 импульсов генерирует высокочастотные импульсы для заполнения временного интервала, образуемого между импуль5 сами напряжения поступающими с выходов ограничителей 9 и 11 напряжения.
Конструктивно генераторы 15 и 17 импухсьсов могут быть выполнены на типовых дискретных микросхемах,
0 Работа следящей системы происходит в двух режимах: основной рабочий и режим контроля,
В основном рабочем режиме датчик 2 связан с приемником 3 через нормаль5 но замкнутые контакты коммутатора 7, При появлении сигнала рассогласования с выходной обмотки приемника 3 поступает напряжение на вход усилителя 4 и далее на вход электродвигате0 ля 5, который через редуктор б перемещает ось приемника 3 в согласованное с. осью датчика 2 положение. Дополнительно к основной работе следящей системы добавляется контроль линии связи между датчиком 2 и приемником 3 за счет того, что происходит сравнение напряжений, поступанмцих с датчи:ка 2, с -напряжением, поступающим на приемник 3, При целостности линий связи между датчиком 2 и приемником 3 эти напряжения будут одинаковы, и регистрирукмций прибор 14 формирует сигнал Исправность, I
Режим контроля следящей системы осуществляется при поступлении с выхода второго генератора 17 импульсов на управляющие входы коммутаторов импульсов 7 и 16 на их переключение, Комм1; татор 7 размыкает свои размыкаю0 щие контакты и тем самым отсоединяет датчик 2 от приемника 3, Коммутатор 16 подает напр${жение с выхода источника 1 переменйого тока на квадра- турн;ло обмотку приемника 3. Таким об5 разом, в результате разрыва связи между датчиком 2 и приемником 3 и подачи напряжения на квадратурную обмотку приемника 3 на период действия
5
5
импульса генератора 17 импульсов приемник 3 преобразовавывается в датчик фазосдвигающие блоки 8 и 10 преобразуют напряжение, поступамцее с синусной и косинусной обмоток датчика 2 и приемника 3, включенного по схеме датчика, в напряжение, постоянное по амплитуде и изменяющееся по фазе в зависимости от разности углов поворота осей датчиков 2 и приемника 3. Ограничители 9 и 11 напряжения формируют прямоугольные импульсы в течение полупериодов напряжений, поступающих на их входы с выходов фазо- спвигакнцих блоков.
В элементе И 12 низкочастотный импульс, сформированный при наличии рассогласований между положением осей датчика 2 и приемника 3, заполняется высркочастотными импульсами с выхода генератора 15
, импульсов. 1
По количеству импульсов, посту- пакяцих с выхода элемента И 12 на вход блока 14, определяется величина рассогласования между положением ос,ей датчика 2 и приемника 3. Если он больше установленного значения, то счетчик 13 формирует сигнал Отказ. Введение новых элементов с соответствующими связями позволяет уменьшить в двенадцать раз момент трения и момент инерции оси приемника системы и обеспечить возможность использования системы в высокочувствительных дистанционных установках.
16774Л
Формула изобретения
Следящая система, содержащая датчик, входная обмотка которого под- 5 ключена к первому выходу источ ника переменного тока, а выходная через последовательно соединенные первый фазосдвигающий блок и первый ограничитель напряжения - к первому вхо10 ДУ элемента И, приемник, выходная обмотка которого через усилитель подключена к входу электродвигателя, вал которого через редуктор кинематически связан с валом ротора
15 приемника, последовательно соединенные второй фазосдвигающий блок и второй ограничитель напряжения, подключенный выходом к второму входу элемента И, соединенного третьим
20 входом с выходом первого генератора «импульсов, а выходом через счетчик - с входом регистрирующего прибора, отличающаяся тем, что, с целью уменьшения момента трения
25 и момента инерции на оси приемника системы, в ней дополнн,тельно установлены второй генератор импульсов и первый и второй коммутаторы, подключенные управляющими входами
30 к выходу второго генератора импульсов, информационный вход первого коммутатора подключен к выходной обмотке датчика, а .выход - к входной обмотке приемника и к входу
35 второго фазосдвигающего блока,информационный вход второго коммутатора подключен к второму выходу источника. переменного тока,а выход - к второй входной обмотке приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля дистанционной передачи угла поворота вала | 1983 |
|
SU1098020A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Задающее устройство следящего электропривода | 1982 |
|
SU1056129A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942097A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752428A1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU842903A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1372623A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1128277A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Преобразователь угла поворота вала сельсина в напряжение постоянного тока | 1978 |
|
SU676869A1 |
Система относится к приборостроению, средствам автоматики и вычислительной техники и может найти широкое применение в установках дистанционного управления с синусно-ко- синусными вращающимися трансформаторами (СКВТ) в качестве датчика и приемника. В ней решается задача контроля состояния системы без увеличения моментов трения и инерции. Выходной сигнал СКВТ-датчика через первый фазосдвигакяций блок и первый ограничитель напряжения поступает на первьй вход элемента И, а через первый коммутатор - на входы СКВТ-приемника и второго фазосдвигакяцего блока.. Выходной сигнал последнего через второй ограничитель напряжения поступает на второй вход элемента И, на третий вход которого поступает выходной сигнал первого генератора импульсов, а с его выхода сигнал через счетчик поступает на вход регистрирующего прибора . Выходной сигнал СКВТ-npHei-on va через усилитель поступает на вход электродвигателя, который через редуктор воздействует на ротор СКВТ-приемника. Сигнал с первого выхода источника переменного тока поступает на входную обмотку СКВТ-датчика, а с второго - на информационный ВХОД второго коммутатора. Выходной сигнал последнего поступает на квадратичную обмотку.СКВТ-приемника. Выходной сигнал второго генератора импульсов поступает на управляющие входы первого и второго коммутаторов. 1 ил.
| Ахметжанов А.А | |||
| Высокоточные системы передачи угла в автоматических системах | |||
| М.: Энергия, 1975, с | |||
| Индукционная катушка | 1920 |
|
SU187A1 |
| Устройство для контроля дистанционной передачи угла поворота вала | 1983 |
|
SU1098020A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
