11
Изобретение относится к малине- строению, в частности к манипуляторам роботов, и предназначено для перемещения и манипулирования в пространстве объектами.
Цель изобретения - повышение подвижности модуля.
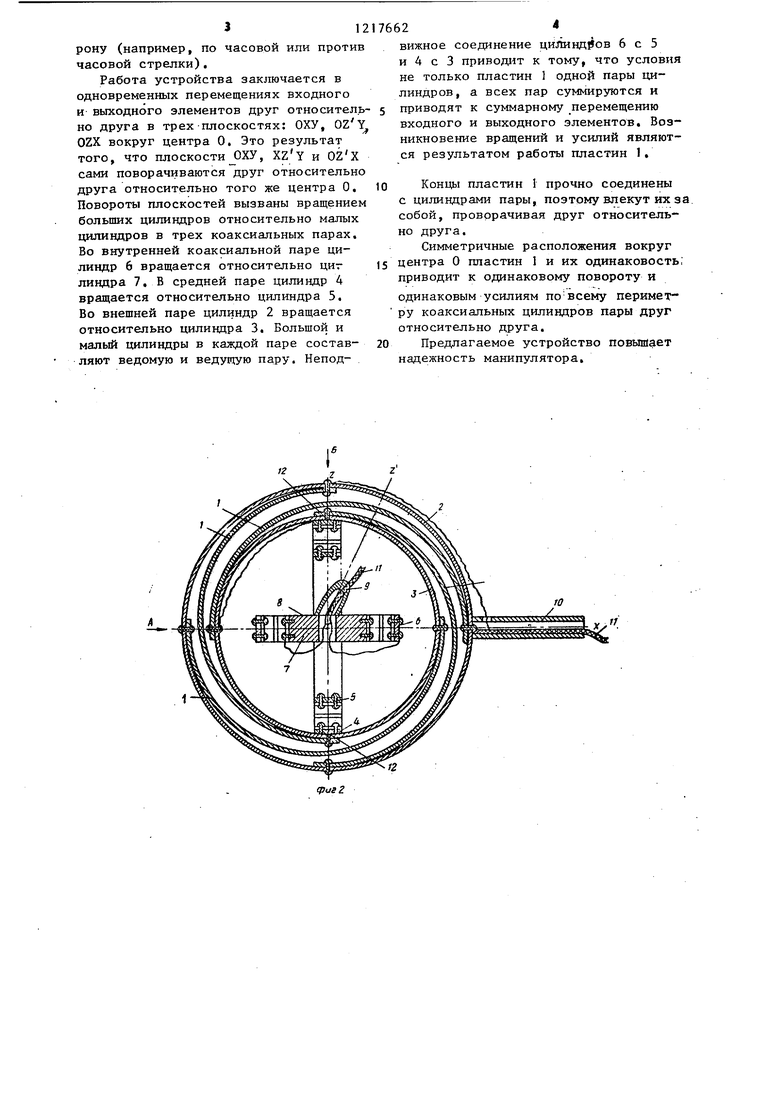
На фиг. 1 показан модуль, общий вид; на фиг. 2 - то же, разрез; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - вид Б на фиг. 2.
Модуль манипулятора содержит двуслойные пластины 1 с разным коэффициентом линейного расширения, большой цилиндр 2 внешней коаксиальной пары, малый цилиндр 3 внешней коаксиальной пары, большой цилиндр 4 средней коаксиальной пары, малый цилиндр 5 средней коаксиальной пары, большой цилиндр 6 внутренней коаксиальной пары, малый цилиндр 7 внутренней коаксиальной пары, торец 8 малого цилиндра внутренней коаксиальной пары, входной элемент 9, выходной элемент 10, гибкие токопроводы 11, крепление 12 модулей с цилиндрами и токопрово- дами.
Кроме того, на фиг. 1-4 обозначе- ны: О - общий центр; ОХУ, ZOX, Z OX, ZOY - плоскости коаксиальных пар, проходящие через общий центр; (Л- угол наклона плоскостями ZOY и Z OY.
Двуслойные пластины помещены в пары из коаксиальных цилиндров. Каждая пара составлена из большого и малого цилиндров. Имеются три пары коаксиальных цилиндров: внешняя, средняя и внутренняя. Внешняя пара коаксиальных цилиндров составлена из большого 2 и малого 3 цилиндров, средняя - из большого 4 и малого 5 цилиндров, внутренняя - из большого
6и малого 7 цилиндров. Малый цилиндр
7внутренней пары выполнен со сплошным торцом 8. К последнему присоединен входной элемент 9, а к наружной стенке большого цилиндра 2 внешней пары перпендикулярно к ее поверхностям прочно присоединен выходной элемент 10. Свободные концы входного и выход- нсэго элементов снабжены резьбой.
Через полости входного и выходного элементов к концам пластин 1 подведены провода 11 энергопитания. Все пластины 1 к стенкам цилиндров коаксиальных пар прочно присоединяются своими концами, В случае соединения по62. 2
средством винтов можно одновременно этими же винтами присоединять к концам модулей и провода энергопитания. Именно такое соединение приведено
на фигуре.
Высота цилиндров коаксиальных пар равна ширине пластин 1. Цилиндры коаксиальных пар либо электроизолирова- ны, либо изготовлены из электроизоляционного конструкционного материала, например пластмассы. Все три пары имеют общий центр 0. Внутренняя пара большим цилиндром 6 укреплена неподвижно в малом цилиндре 5 средней
коаксиальной пары. Для этопо цилиндр 6 наружной стенкой в местах соприкосновения .с внутренней стенкой цилиндра 5 прочно соединен. Аналогично средняя пара неподвижно укреплена во
внешней, коаксиальной паре. Для этого большой цилиндр средней пары 4 в местах соприкосновения прочно соединен с малым цилиндром 3 внешней пары.
.
Плоскости коаксиальных пар расположены друг относительно друга так, чтобы входной элемент 9, закрепленный на торце 8, выходил бы за пределы большого цилиндра 2 внешней коаксиальной пары, не соприкасаясь с цилиндрами коаксиальных пар и пластинами 1. Это достигается взаимным наклоном каждой из плоскостей, проходящих через общий центр О всех коаксиальных пар. На фиг. 1-4 показано, что в
данном случае плоскость ХОУ внутрен- ,. ней пары наклонена к плоскости ОУ бо лее, чем на 90 , в результате чего ось Z О отклонена от оси ZO на угол
5, обеспечивающий отсутствие касания концевой полой трубки торца 8 к цилиндрам коаксиальных пар и пластин 1 , Все пластины 1 в каждой паре расположены симметрично относительно
общего центра 0. В каждой паре пластины 1 предварительно изогнуты, одним концом касаясь внутренней стенки большого цилиндра пары, а другим концом - наружной стенки малого цилиндр а этой же пары. В местах касания они прочно и неподвижно присоединены к стенкам. Например, во внешней коаксиальной паре пластины одним концом присоединен. к цилиндру 2, а другим
концом - к цилиндру 3. Крепление произведено винтами. При этом соблюдается общее правило лля пластин I: все модули в паре направлены в одну сто312
рону (например, по часовой или против часовой стрелки).
Работа устройства заключается в одновременных перемещениях входного и выходного элементов друг относительно друга в трех-плоскостях: ОХУ, OZ Y OZX вокруг центра 0. Это результат того, что плоскости ОХУ, XZ Y и OZ X сами поворачиваются друг относительно друга относительно того же центра 0. Повороты плоскостей вызваны вращением больших цилиндров относительно малых цилиндров в трех коаксиальных парах. Во внутренней коаксиальной паре цилиндр 6 вращается относительно цит- линдра 7, В средней паре цилиндр 4 вращается относительно цилиндра 5, Во внешней паре цилиндр 2 вращается относительно цилиндра 3, Большой и малый цилиндры в каждой паре составляют ведомую и ведущую пару. Непод2
вижное соединение цилиндров 6 с 5 и 4 с 3 приводит к тому, что условия не только пластин 1 одной пары цилиндров, а всех пар суммируются и приводят к суммарному перемещению входного и выходного элементов. Возникновение вращений и усилий являются результатом работы пластин 1.
Концы пластин 1 прочно соединены с цилиндрами пары, поэтому влекут их за. собой, проворачивая друг относительно друга.
Симметричные расположения вокруг
центра О пластин 1 и их одинаковость, приводит к одинаковому повороту и
одинаковым усилиям по всему периметру коаксиальных цилиндров пары друг относительно друга.
Предлагаемое устройство повышает надежность манипулятора.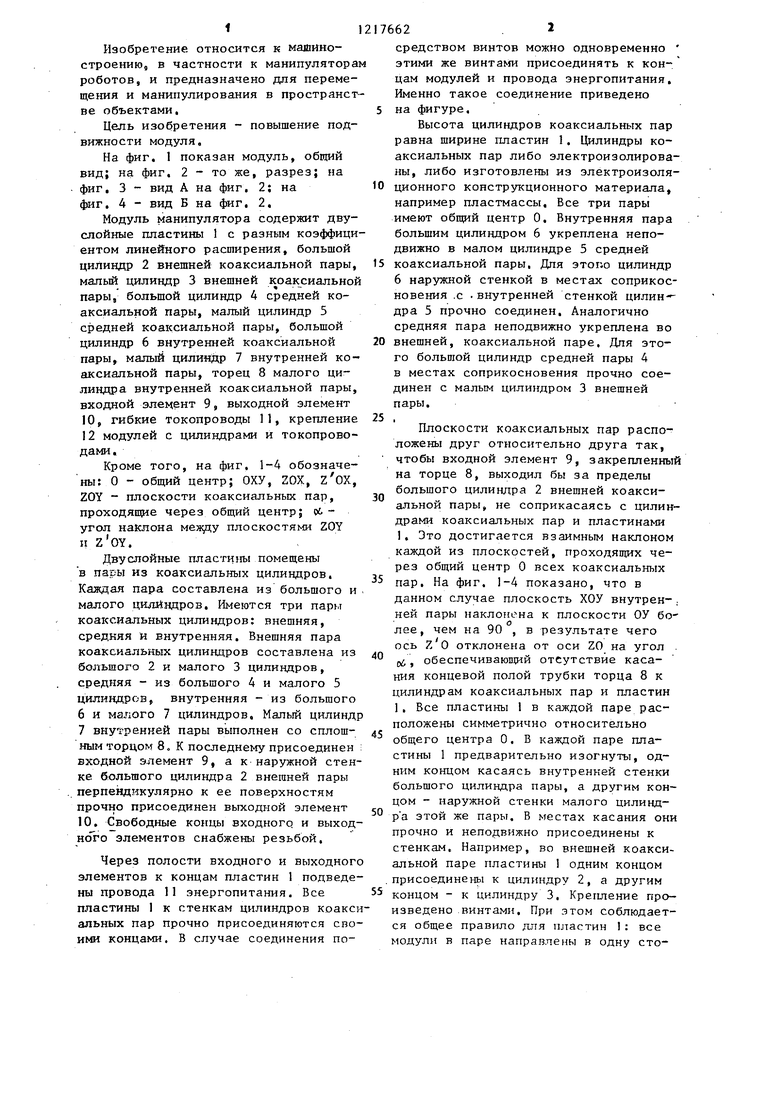
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МАСКИРОВКИ АНТЕНН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2805574C1 |
| СПОСОБ МАСКИРОВКИ АНТЕНН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2799348C1 |
| Способ маскировки антенного устройства посредством наземного антенного укрытия | 2020 |
|
RU2768257C1 |
| СПОСОБ МАСКИРОВКИ АНТЕНН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2814153C1 |
| СПОСОБ НЕМОНОТОННОГО ДЕФОРМИРОВАНИЯ АНИЗОТРОПНЫХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2021 |
|
RU2781869C1 |
| Переносная моторная пила | 1976 |
|
SU844278A1 |
| Щелевая кольцевая антенна | 1990 |
|
SU1709443A1 |
| Устройство для измерения напряженности электростатического поля | 1983 |
|
SU1163285A1 |
| ПЛОСКАЯ РЕЗОНАТОРНАЯ АНТЕННА (ВАРИАНТЫ) | 2007 |
|
RU2357337C1 |
| СПОСОБ ОБЪЕМНОГО ПРЕССОВАНИЯ БРИКЕТОВ ИЗ ПОРОШКООБРАЗНОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2014 |
|
RU2572268C1 |

JO
Jt-rtV„::- l- -Tj-Хх .
№Wf « y;yf gig№Sg«fej
ч
С)
cpus.AСоставитель Г. Карева Редактор М, Петрова Техред М,Faроцай Корректор М. Самборская
Заказ 1048/20 Тираж 1030 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
Ж.
| Сустав мунипулятора | 1979 |
|
SU837862A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
