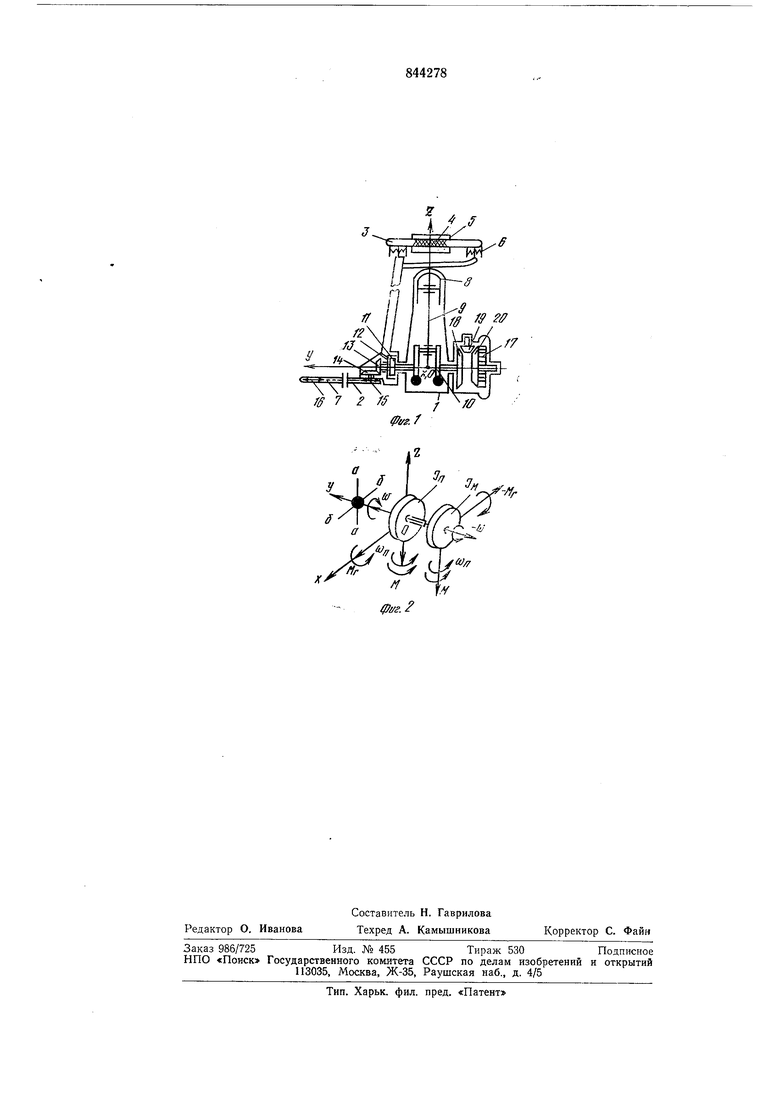
Изобретение относится к переносным моторным пилам и может быть иопользоваио в лесной промышленности. Известны переносные моторные пилы, включающие опорную раму с рукоятками управления, бензобак, пильный аппарат, двигатель, коленчатый вал, связанный с установленным соосно ему маховиком 1, 2. Недостатком известных пил является повышенный уровень вибрации на рукоятках управления и недостаточная управляемость, Целью изобретения является снижение вибрации рукояток управления и улучшение управляемости. С этой целью маховик связан с коленчатым валом посредством имеюших паразитное колесо двух конических передач, причем ось -паразитного колеса перпендику-, ляриа оси коленчатого вала. На фиг. 1 изображена .переносная моторная пила, общий вид; на фиг. 2 - схема действия гироскопических моментов на корпус двигателя. Двигатель 1 жестко соединен с пиль: ным аппаратом 3. Опорная рама 3 с жестко соединенными рукоятками и бензобаком 5 связана с двигателем / при помощи амортизаторов 6. Привод пильной цепи 7 осуществляется двигателем /, соСТОЯЩИМ из поршня 8, шатуна 9, коленчатого вала 10, ведущего и ведомого 12 элементов муфты сцепления, ведущей 1 и ведомой 14 щестерен редуктора, ведущей 15 и Ведомой 16 звездочек пильной цепи 7. МаховиК 17, жестко связанный с крыльчаткой вентилятора охлаждения цилиндра двигателя /, установлен соосно коленчатому валу 10 и связан с ним посредством имеющих паразитное колесо двух конических пар шестерен 18, 19 и 19, 20 с передаточным отношением, равным единице, причем ось паразитного колеса перпендикулярна оси коленчатого вала. Осевой момент инерции маховика 17 и шестерни 20 I выполнен равным г /П max Г п min /м -2 п /пост Г nepi /пост /1о + /1, + Л2-Т-Лз + А8 + + + (/И + Лг, + /1ь- + №цГ2){;2н,з, где/м - осевой момент инерции маховика 17 и шестерни 20; I „ - приведенный к оси коленчатого вала 10 момент инерции элементов привода ПИЛЬНОЙ цепи;
Ло Ли 12 Лз Лн) 14. is Лс - осевые моменты инерции коленчатого вала 10, ведущего /,/ и ведомого 12 элементов муфты сцепления, конических шестерен 13, JS, 19, 14, звездочек ,15, 16 .пильной цепи;
2 (Jjs-i8 уг- - передаточное отношение
)
шестерен J8, .19 с числами зубьев Z|g и Zig;
14-13 - - Передаточное отношение
шестерен 75, М с числами зубьев Zi3, ZH; /Пц - масса цепи; г - радиус ведуш;ей звездочки /5; пер - переменная составляющая
In,
I, m, + rn.,r, + /s,
О),,
со,
/Пз, mg - массы лоршня 5 и шатуна
fs, - момент инерции шатуна 9 относительно оси, проходящей через его центр тяжести;Vs - линейная скорость порщня 8; Vs, - линейная скорость центра
тяжести шатуна 9; 0)9, сою - угловые скорости шатуна 9 и коленчатого вала 10.
п max - /пост г пер max ч niln /пост h /пер millРабота моторной пилы осуществляется следующим образом.
Неуравновешенные силы и моменты на рабочих режимах приводят к колебаниям рыскания (угловым относительно оси OZ) и Продольной качки (угловым относительно оси ОХ) двигателя на подвеске. Кроме того, мотопила принудительно поворачивается относительно этих же осей при манипулировании на релшмах рабочего хода. Вращающиеся с большой угловой скоростью элементы привода цепи со средним значением приведенного к оси коленчатого вала моментом /,| и -маховик с моментом инерции /„ приводят к возникновению гироскопических моментов, действующих на корпус двигателя. Например, при вращении коленчатого вала с угловой скоростью ш и нрилол :ении момента внешних сил М к корпусу двигателя, вектор которого перпендикулярен плоскости XOY, ось коленчатого вала повернется в этой плоскости с угловой скоростью прецессии относительно узловой оси а-а рассматриваемой формы колебаний. Это вызовет возникновение гироскопического момента М. -/п|шХ Хсо „;, вектор которого будет перпендикулярен осям возмущающих моментов. Под действием М01мента Mf ось коленчатого вала OY стремится по.вернуть€Я в плоскости
OYZ относительно оси ОХ против часовой стрелки. Поскольку маховик вращается с равной угловой скоростью ш, но в противоположную коленчатому валу сторону, угловые скорости прецессии совпадают, а /„
/п, то гироскопический момент маховика равен Afr /„IcoXWni, т. е. он будет равен по величине среднему значению гироскопического момента вращающихся элементов привода 1пильной цепи, но иротивоположен 1по направлению. Суммарный гироскопический момент, действующий на корпус двигателя в плоскости ZOY, становится равным нулю. Это приводит к уменьшению собственных частот колебаний двигателя
на подвеске, увеличению отстройки системы от частот воз1мущающих сил и моментов, действующих на рабочих режимах, и снижению вибраций на корпусе двигателя и рукоятках. Аналогичные явления происходят И при повороте оси коленчатого вала относительно узловой оси б-б ъ плоскости YOZ. Отсутствие гироскопических моментов позволяет улучшить управляемость исполнительным механизмом, поскольку они
не препятствуют поворотам мотопилы относительно осей ОХ и OZ, которые производятся, соответственно, при раскряжовке и валке.
Формула изобретения
Переносная моторная пила, включающая опорную раму с рукоятками управления, бензобак, пильный аппарат, двигатель, коленчатый вал, связанный с установленным соосно ему маховиком, отличающаяся тем, что, с целью снижения вибрации рукояток управления и улучшения
управляемости, маховик связан с коленчатым валом посредством имеющих паразитное колесо двух конических передач, причем, ось паразитного колеса перпендикулярна оси коленчатого вала.
Источники информации, принятые во внимание при экспертизе:
1.Полищук А. П. и др. Моторные инструменты ДЛЯ- лесозаготовок, М., 1970,
с. 25.
2.Поздеев В. С. и др. Бензомоторные пилы, М., 1969, с. -8 (прототип).
fS 7
,ff
fe/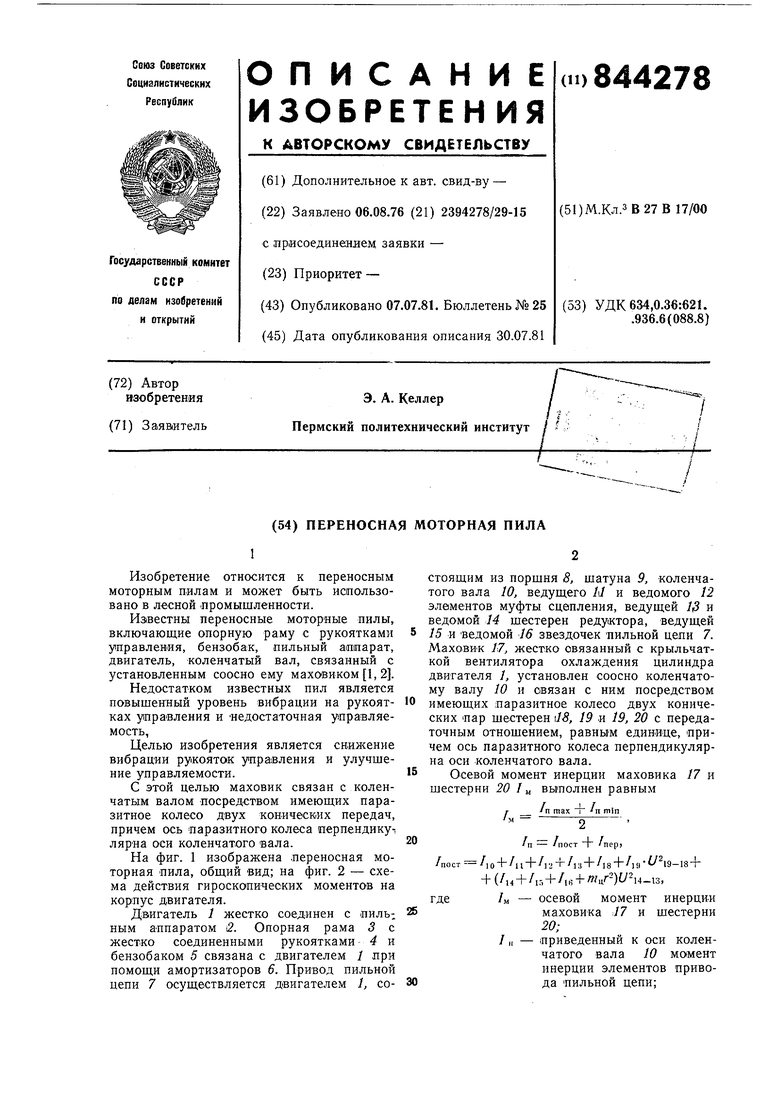
| название | год | авторы | номер документа |
|---|---|---|---|
| Переносная моторная пила | 1978 |
|
SU808265A1 |
| Переносная моторная пила | 1989 |
|
SU1717348A1 |
| ПЕРЕНОСНАЯ МОТОРНАЯ ПИЛА | 1974 |
|
SU419376A1 |
| Переносная бензомоторная цепная пила | 1981 |
|
SU992185A1 |
| БЕНЗИНОМОТОРНАЯ ПИЛА | 2005 |
|
RU2281854C1 |
| Переносная моторная пила | 1976 |
|
SU648400A1 |
| Переносная моторная пила | 1990 |
|
SU1794650A1 |
| БЕНЗИНОМОТОРНАЯ ПИЛА | 2005 |
|
RU2281853C1 |
| Переносная моторная пила | 1980 |
|
SU874336A1 |
| Переносная моторная пила | 1973 |
|
SU447249A1 |