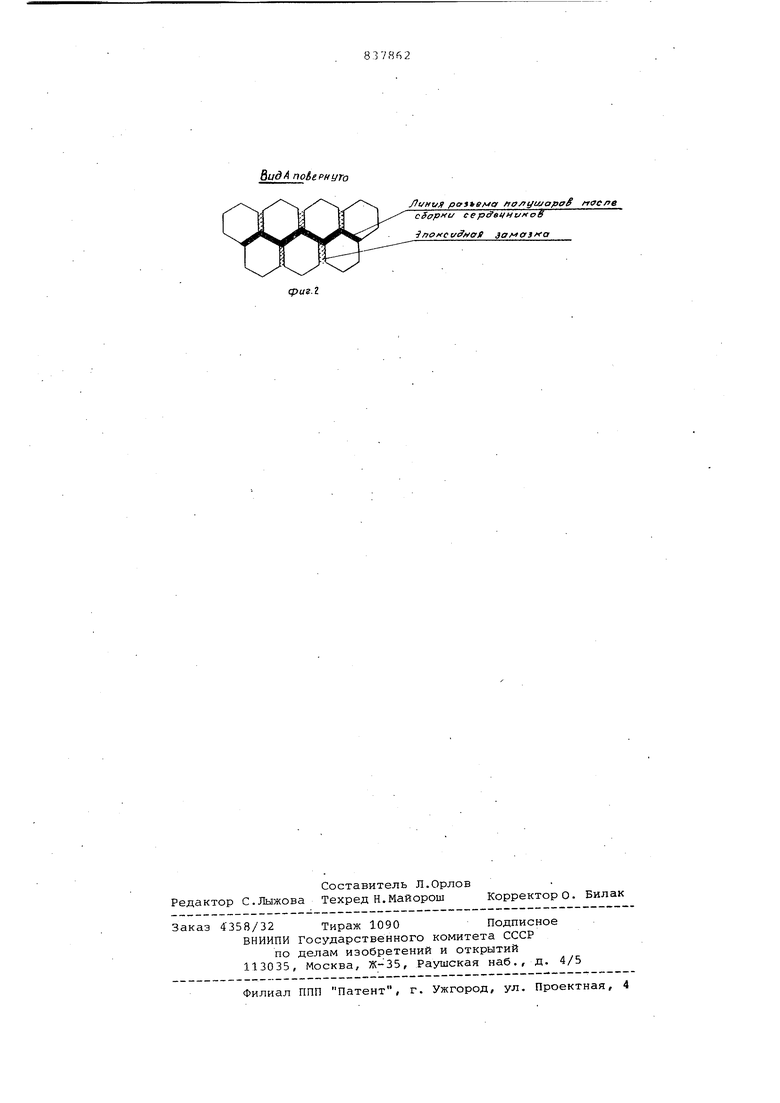
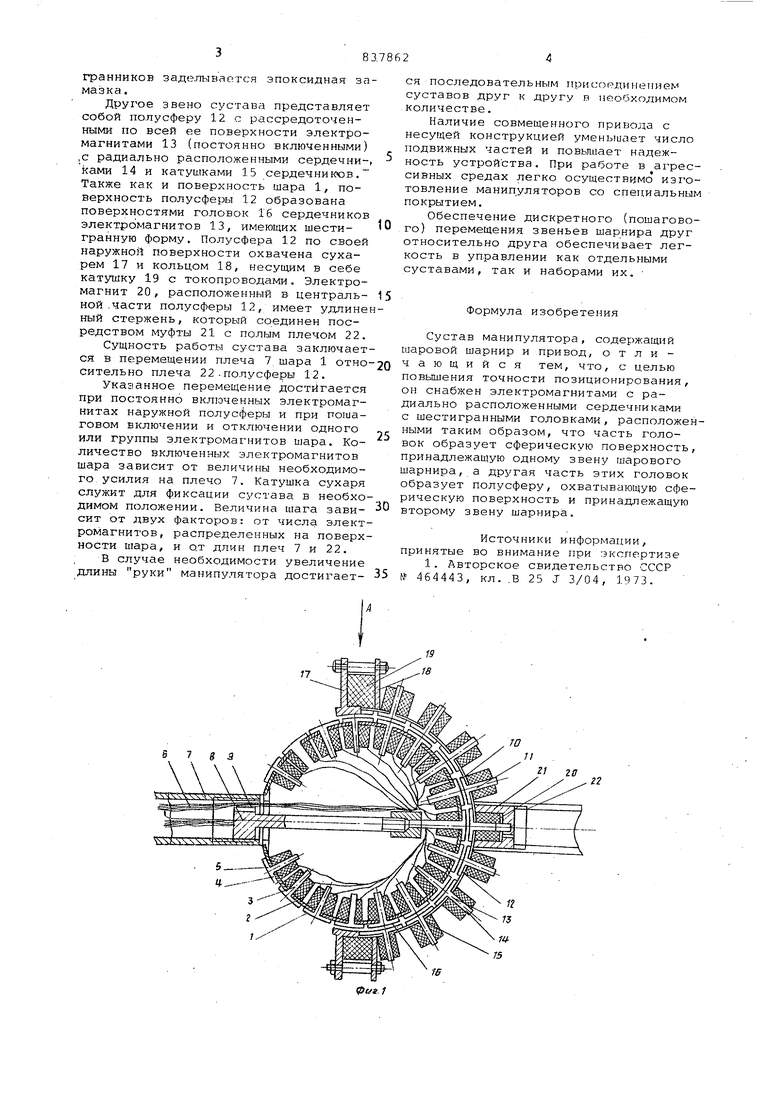
Изобретение относится к машиностроению, в частности к манипуляторам и промышленным роботам, предназначенным для обслуживания оборудования различного технологического назначения на операциях, например, установки, транспортирования, снятия предметов и т.п. Известен сустав манипулятора, со держащий шаровой шарнир и привод i К недостаткам данного шарнира относится явление перерегулирования изза инерционности переходных процессов а разобщенность несущей конструкции и привода вносит дополнительные ошибки. Цель изобретения - повышение точности позиционирования сустава манипулятора. Для достижения поставленной цели он снабжен электромагнитами с радиаль но расположенными сердечниками с шестигранными головками, расположенными таким образом, что часть головок образует сферическую поверхность, при надлежащую одному звену шарового шарнира, а другая часть этих головок образует полусферу, охватывакицую сферическую поверхность и принадлежащую второму звену шарнира. На фиг. 1 показан сустав манипулятора, разрез; на фиг. 2 - вид А на фиг. 1 (без полусферы). Одно из звеньев сустава представляет собой шар 1, поверхность которого состоит из равномерно распределенных по ней электромагнитов 2, имеющих возможность последовательного включения с радиально расположенными сердечниками 3 и катушками 4 сердечников. Собственно поверхность шара образуют поверхности шестигранных голоБОК 5 сердечников электромагнитов 2, Провода 6 питания электромагнитов 2 вводятся в полость шара через полость плеча 7. Шар 1 состоит из двух полушарий, которые стянуты между собой шпилькой 8,которая одним концом закреплена в полости плеча 7 посредством муфты 9,а другим концом через соединенную муфту 10 - с удлиненным стержнем 11 электромагнита. Шестигранники головок 5 стержней электромагнитов 2 расположены так, что линия разъема между полушариями . (см. фиг. 2) дает возможность вхождвния вершин граней шестигранников в седловины между- гранями шестигранников. В зазоры между гранями шестигранников заде.пывается эпоксидная замазка . Другое звено сустав; представляет собой полусферу 12 с рассредоточенными по всей ее поверхности электромагнитами 13 (постоянно включенными) ,с радиально расположенными сердечни-, ками 14 и катушками 15 сердечников. Также как и поверхность шара 1, поверхность полусферы 12 образована поверхностями головок 16 сердечников электромагнитов 13, имеющих шестигранную форму. Полусфера 12 по своей наружной поверхности охвачена сухарем 17 и кольцом 18, несущим в себе катушку 19 с токопроводами. Электромагнит 20, расположенный в центральной .части полусферы 12, имеет удлине ный стержень, который соединен посредством муфты 21 с полым плечом 22. Сущность работы сустава заключает ся в перемещении плеча 7 шара 1 отно сительно плеча 22-полусферы 12. Указанное перемещение достигается при постоянно включенных электромагнитах гаружной полусферы и при пошаговом включении и отключении одного или группы электромагнитов шара. Количество включенных электромагнитов шара зависит от величины необходимого усилия на плечо 7. Катушка сухаря служит для фиксации сустава в необхо димом положении. Величина шага зависит от двух факторов: от числа элект ромагнитов, распределенных на поверх ности шара, и от длин плеч 7 и 22. В случае необходимости увеличение длины руки манипулятора достигаетWся последовательным присординением суставов друг к другу в необходимом количестве. Наличие совмещенного привода с конструкцией уменьшает число подвижных частей и повьпиает надежность устройства. При работе в агрессивных средах легко осуществимо изготовление манипуляторов со специальным покрытием. Обеспечение дискретного (пошагового) перемещения звеньев шарнира друг относительно друга обеспечивае т легкость в управлении как отдельными суставами, так и наборами их. Формула изобретения Сустав манипулятора, содержащий шаровой шарнир и привод, отличающийся тем, что, с целью повышения точности позиционирования, он снабжен электромагнитами с радиально расположенными сердечниками с шестигранными головками, расположенными таким образом, что часть головок образует сферическую поверхность, принадлежащую одному звену шарового шарнира, а другая часть этих головок образует полусферу, охватывающую сферическую поверхность и принадлежащую второму звену шарнира. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 464443, кл. .В 25 J 3/04, 1973.
Вид A note рнуго
Линия pofftef-ty f o/ yujapaS после cSopf u сер ечнинов
noMCvffHoS sof osffa
| название | год | авторы | номер документа |
|---|---|---|---|
| Сустав манипулятора | 1979 |
|
SU872250A1 |
| Сустав манипулятора | 1982 |
|
SU1111857A2 |
| ШАРНИР СФЕРИЧЕСКИЙ ФИКСИРУЕМЫЙ | 2005 |
|
RU2310775C2 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Сустав манипулятора | 1985 |
|
SU1379109A1 |
| Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы | 2023 |
|
RU2818704C1 |
| Силовой сустав манипулятора | 1982 |
|
SU1065188A1 |
| Комплект для эндопротезирования тазобедренного сустава | 2018 |
|
RU2673980C1 |
| ЭНДОПРОТЕЗ ТАЗОБЕДРЕННОГО СУСТАВА | 2007 |
|
RU2361545C1 |
| ЗУБНОЙ ИМПЛАНТАТ С ПОВОРОТНОЙ ОПОРОЙ | 2008 |
|
RU2362507C1 |