Изобретение относится к судостроению, в частности к способам контроля остойчивости судна в условиях эксплуатации, и может быть использовано при создании навигационных экспертных систем.
Цель изобретения - повышение безопасности плавания судна путем повышения достоверности оценки остойчивости судна в условиях разрушающегося волнения.
Известно техническое решение оперативного контроля остойчивости в условиях эксплуатации остойчивости» - «Способ контроля остойчивости судна» по патенту №2091269 от 27.09.97. Это изобретение основано на развитии способа контроля остойчивости, изложенного в монографии Севастьянова Н.Б. Остойчивость промысловых судов. - Л.: Судостроение, 1979, с.187-190.
В качестве прототипа использован патент №2057678 от 10.04.96, содержащий техническое решение, требующее привлечения технологии экспертных систем. Недостатком этого способа является отсутствие возможности учета влияния на остойчивость разрушающихся на мелководье волн, что в целом снижает достоверность оценки остойчивости.
Технический результат достигается тем, что в случае разрушающегося волнения дополнительно измеряют глубину воды под килем судна, скорость угловых перемещений при бортовой качке, параметры деформируемой волны в заданном районе эксплуатации.
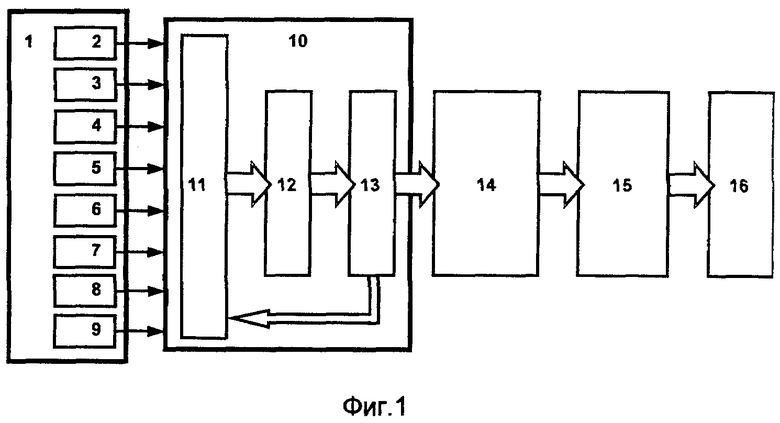
На чертеже (фиг.1) представлена обобщенная структурная схема устройства, реализующая предлагаемый способ.
Устройство содержит измерительный блок 1, включающий датчики угловых скоростей 2 и перемещений 3 при бортовой качке, осуществляющие регистрацию амплитуд θ и θ', а также «кажущегося» периода бортовой качки судна, датчик курсового угла волны 4, датчики линейных перемещений 5 и 6, определяющие осадки судна носом и кормой, датчик скорости судна 7, датчик глубины воды 8, датчик волнения (волнограф) 9, выходы которых соединены с модулем преобразования измерительной информации 10, включающим коммутатор 11, аналого-цифровой преобразователь (АЦП) 12 и стандартный интерфейс 13, сигналы от которого поступают на вычислительный блок 14, реализующий алгоритм преобразования информации при оценке остойчивости, результаты работы которого выводятся на экран дисплея 15 и документируются с помощью принтера 16.
Способ контроля остойчивости судна осуществляют следующим образом.
Измеряют угловые перемещения θ при бортовой качке, осадки судна носом Тн и кормой Тк, «кажущийся» период волны τк, курсовой угол волны φк и скорость судна на нерегулярном волнении V, дополнительно измеряют глубину воды Н, угловую скорость θ' бортовой качки и вертикальные перемещения уровня жидкости hм, определяющие параметры деформируемой волны.
При построении алгоритма контроля остойчивости использованы данные работ: [Холодилин А.Н., Шмырев А.Н. Мореходность и стабилизация судов на волнении. - Л.: Судостроение, 1976, с.307-327], [Нечаев Ю.И. Моделирование остойчивости на волнении. Современные тенденции. Л.: Судостроение, 1989, с.38-42, 218-222].
По данным измерений устанавливают:
1. Высоту волны 3%-ной обеспеченности hM3% и среднюю длину волны λM путем статистической обработки волнограммы hM(t).
2. Водоизмещение судна D, фактическую метацентрическую высоту h0 и аппликату центра тяжести ZG



где С=f(D); В - ширина судна, м; (τθ)w - средний период крупных колебаний при бортовой качке, с; Zm - аппликата метацентра, м.
3. Дисперсии амплитуд Dθ и угловых скоростей Dθ' бортовой качки путем статистической обработки кривых θ(t) и θ'(t).
4. Амплитуду бортовой качки 0.1%-ной обеспеченности

где р=3,7.
5. Кинетическую энергию К качающегося судна в момент удара волны

где  - расчетное значение угловой скорости качки судна в момент удара гребня разрушающейся волны с учетом свободных затухающих колебаний:
- расчетное значение угловой скорости качки судна в момент удара гребня разрушающейся волны с учетом свободных затухающих колебаний:

где n - число свободных затухающих колебаний; Тθ - период свободных колебаний судна с учетом влияния мелководья; ν - коэффициент демпфирования на мелководье; θ'k - угловая скорость качки, приобретенная судном в результате удара разрушающейся волны,

где I1мв - момент инерции массы судна относительно продольной оси, а величины zy, zG1 и импульс удара Iy вычисляются по формулам:
аппликата центра удара волны

аппликата ЦТ судна с учетом присоединенной массы воды:
импульс удара
Iy=0.5Phty, Pη=1,2λ22F1max.

где s=2TIB; α - коэффициент полноты ватерлинии; λ22 - присоединенная масса воды; λ24mid - статический момент присоединенной массы контура мидель-шпангоута; β0 - коэффициент полноты диаметральной плоскости; I22mid=0.5prT2 - присоединенная масса контура мидель-шпангоута; F1max=1+3,5γ - максимальное значение ускорения в одиночной волне, где γ=hм3% / Н.
7. Возможность опрокидывания судна при совместном действии качки и удара разрушающейся волны

где Тd - запас потенциальной энергии в момент удара (определяется площадью диаграммы статической остойчивости М(θ) или максимальной ординатой диаграммы динамической остойчивости Т(θ).
8. В случае невыполнения условия (11) судно выдерживает удар разрушающейся волны и наклоняется на угол динамического крена (θ∂)mах, определяемый в точке пересечения горизонтальной прямой, характеризующей кинетическую энергию К, и кривой Т(θ) диаграммы динамической остойчивости

Вследствие простоты стандартные геометрические построения, широко применяемые в задачах статики корабля, при интерпретации формул (11) и (12) не приводятся.
8. Возможность опрокидывания в процессе развития стремительного дрейфа судна от удара разрушающейся волны

где М(θ) - восстанавливающий момент; M(t) - кренящий момент, возникающий при дрейфе судна

где Zp - аппликата приложения силы, обусловленной ударом разрушающейся волны; Qη, - поперечная горизонтальная сила неинерционной природы:

где Cq - коэффициент сопротивления при дрейфе судна, So≈LT - площадь проекции подводной части корпуса судна на диаметральную плоскость; µηθ -присоединенный статический момент при установившемся дрейфе; Zq - аппликата точки приложения силы Qη; величины Cq и Zq определяются по формулам:
где X1=L/B-5,5; X2=В/Т-2,0; Х3=0,85-δ; Х4=θ0; при угле крена θ0 превышающем угол θd входа кромки палубы в воду θ0≥θd следует принимать θ0=θd.
Функциональная схема, реализующая способ контроля остойчивости судна на разрушающемся волнении работает следующим образом.
Данные измерений от блока датчиков 1, включающего измерители 2 и 3 угловых и линейных перемещений при бортовой качке, датчик курсового угла волны 4, датчики осадок судна носом и кормой 5 и 6, датчик скорости судна 7, датчик глубины воды 8, датчик волнения 9 поступают для предварительной обработки в модуль преобразования измерительной информации 10, где производится их коммутация 11 и обработка с помощью аналого-цифрового преобразователя 12, выход которого с помощью стандартного интерфейса 13 соединен со входом вычислительного блока 14, где на основе выражений 1-17 производятся вычислительные операции по анализу исходной информации и оценке возможности опрокидывания судна в момент удара волны и в условиях стремительного дрейфа, причем результаты работы вычислительного блока 14 демонстрируются на дисплее 15 и документируются с помощью принтера 16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА В УСЛОВИЯХ ЭКСТРЕМАЛЬНОГО ВОЛНЕНИЯ | 2016 |
|
RU2647357C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 2013 |
|
RU2518374C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1989 |
|
RU2033369C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1998 |
|
RU2147540C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2019 |
|
RU2740617C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1991 |
|
RU2040429C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1992 |
|
RU2043271C1 |
Изобретение относится к судостроению, в частности к способам контроля остойчивости судна на разрушающемся на мелководье волнении. Сущность изобретения заключается в том, что в заданном районе плавания измеряют угловые скорости и перемещения при бортовой качке, осадки судна носом и кормой, «кажущийся» период волны, курсовой угол и скорость судна на нерегулярном волнении, глубину воды, параметры разрушающегося на мелководье волнения. По данным измерений рассчитывают характеристики ударного воздействия разрушающихся волн, определяют фактические показатели динамики взаимодействия судна с внешней средой и производят оценку остойчивости в момент удара волны и в условиях стремительного дрейфа от воздействия разрушающейся волны. Технический результат заключается в повышении безопасности плавания. 1 ил.
Способ контроля остойчивости судна на разрушающемся волнении, основанный на измерении периода бортовой качки и определении расчетом метацентрической высоты, при вычислении которой дополнительно измеряют осадки судна носом и кормой, «кажущийся» период волны, курсовой угол и скорость судна на нерегулярном волнении, отличающийся тем, что при оценке остойчивости в условиях разрушающегося волнения в заданном районе плавания при текущем состоянии нагрузки судна дополнительно измеряют угловую скорость при бортовой качке, глубину воды под килем судна и параметры деформируемого на мелководье волнения, на основании чего рассчитывают характеристики ударного воздействия разрушающихся волн, определяют фактические показатели динамики взаимодействия судна с внешней средой и возможность опрокидывания судна в момент удара разрушающейся волны путем сопоставления кинетической энергии удара волны и запаса потенциальной энергии судна в момент удара, а также опрокидывания судна при развитии стремительного дрейфа от удара разрушающейся волны путем сопоставления кренящего момента от дрейфа с восстанавливающим моментом судна, при этом величина потенциальной энергии в момент удара волны устанавливается по диаграммам статической или динамической остойчивости, а при дрейфе судна по диаграмме статической остойчивости.
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ И СКОРОСТИ СУДНА | 1992 |
|
RU2057678C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1989 |
|
RU2033369C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1994 |
|
RU2091269C1 |
| US 4918628 А, 17.04.1990 | |||
| Способ для приготовления препаратов ферромагнитных веществ для электронной микроскопии и устройство для его осуществления | 1982 |
|
SU1033904A1 |

