СЛ С
{
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для контроля мореходных характеристик судна | 1983 |
|
SU1219446A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| Система определения метацентрической высоты судна | 1987 |
|
SU1586953A1 |
| АКТИВНЫЙ УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ СУДНА | 2015 |
|
RU2616505C1 |
| Система определения метацентрической высоты судна | 1986 |
|
SU1560449A1 |
| Способ кренования судна | 1976 |
|
SU587034A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ СУДНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240254C1 |
| Способ определения метацентрической высоты подводных и надводных объектов и устройство электронного угломерного прибора для его осуществления | 2018 |
|
RU2670319C1 |
| Способ оценки и восстановления начальной остойчивости судна | 2021 |
|
RU2764048C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА СУДНА И АППЛИКАТЫ ЕГО ЦЕНТРА ТЯЖЕСТИ | 2011 |
|
RU2466900C1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ СУДНА С БОРТОВОЙ ИЛИ УГЛОВОЙ РАМПОЙ, содержащее пульт управления рампой, кренометр, связанный с индикатором кренящего момента, осадкомеры, связанные с индикатором осадки, отличающееся тем, что, с целью повыщения точности измерения и уменьщения трудоемкости определения метацентрической высоты, оно снабжено коммутирующим блоком, блоком контроля угла наклона рампы с индикатором этого угла, блоком вычисления и сигнализатором предельного угла крена, подключенным через коммутирующий блок к пульту управления рампой, при этом вход предельного угла крена сигнализатора соединен с выходом кренометра, а все указанные индикаторы подключены к блоку вычисления.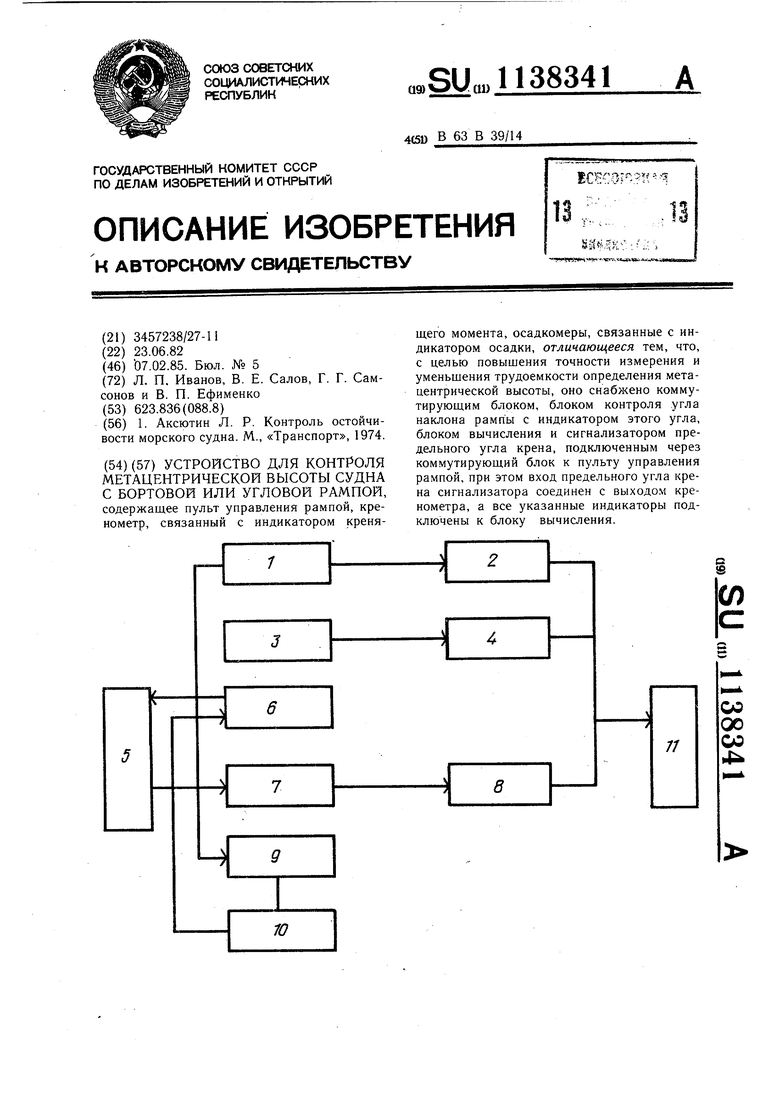
со 00 оо
;/
Изобретение относится к судостроению, в частности к устройствам для контроля цетацентрической высоты судна.
Известно устройство для контроля метацентрической высоты судна с бортовой или угловой рампой, содержащее пульт управления рампой, кренометр, связанный с индикатором кренящего момента, осадкомеры, связанные с индикатором осадки 1.
Недостатками этого устройства являются сложность конструкции, большая затрата времени и трудоемкость «подготовительных операций, так как грузы, применяемые для кренования, должны быть тщательно взвешены, а величина перемещения точно определена.
Целью изобретения является повышение точности измерения и уменьшение трудоемкости определения метацентрической высоты
Поставленная цель достигается тем, что устройство для контроля метацентрической высоты судна с бортовой или угловой рампой, содержащее пульт управления рампой, кренометр, связанный с индикатором кренящего момента, осадкомеры, связанные с индикатором осадки, снабжено коммутирующим блоком, блоком контроля угла наклона рампы с индикатором этого угла, блоком вычисления и сигнализатором предельного угла крена, подключенным через коммутирующий блок к пульту управления рампой, при этом вход предельного угла крена сигнализатора соединен с выходом кренометра, а все указанные индикаторы подключены к блоку вычисления.
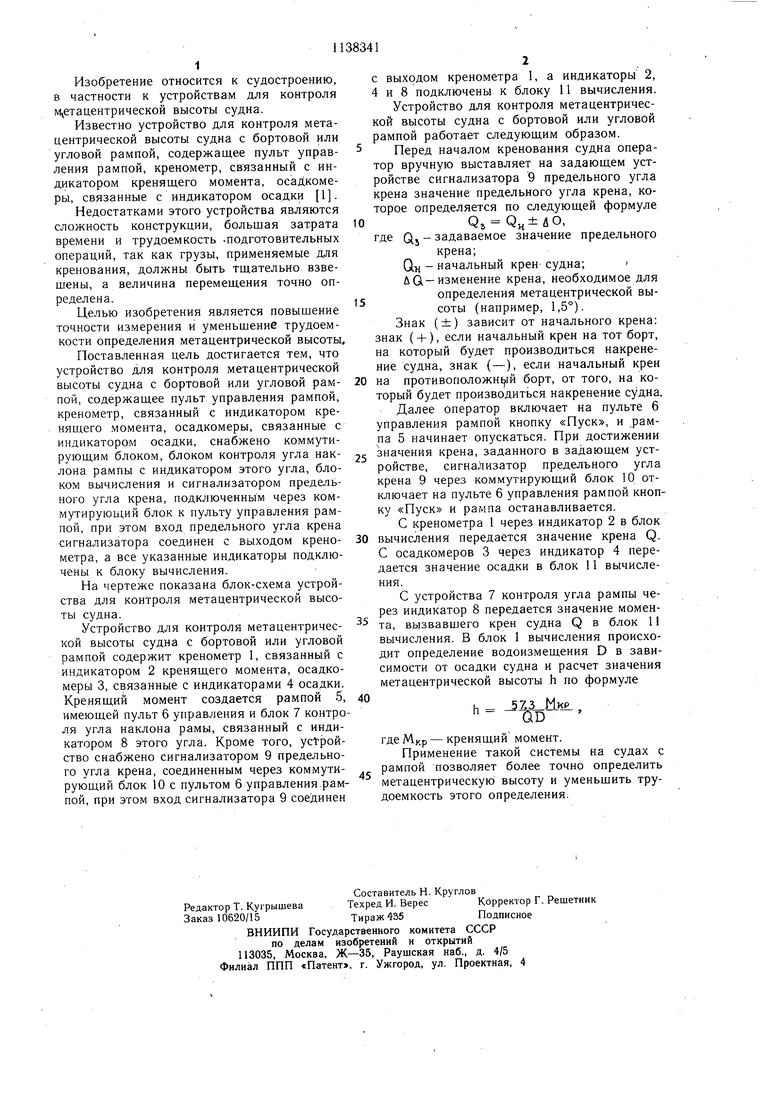
На чертеже показана блок-схема устройства для контроля метацентрической высоты судна.
Устройство для контроля метацентрической высоты судна с бортовой или угловой рампой содержит кренометр 1, связанный с индикатором 2 кренящего момента, осадкомеры 3, связанные с индикаторами 4 осадки. Кренящий момент создается рампой 5, имеющей пульт 6 управления и блок 7 контроля угла наклона рамы, связанный с индикатором 8 этого угла. Кроме того, yctpoйство снабжено сигнализатором 9 предельного угла крена, соединенным через коммутирующий блок 10 с пультом 6 управления.рампой, при этом вход сигнализатора 9 соединен
с выходом кренометра 1, а индикаторы 2, 4 и 8 подключены к блоку 11 вычисления.
Устройство для контроля метацентрической высоты судна с бортовой или угловой рампой работает следующим образом.
Перед началом кренования судна оператор вручную выставляет на задающем устройстве сигнализатора 9 предельного угла крена значение предельного угла крена, которое определяется по следующей формуле
Q, д„±йО, где QJ - задаваемое значение предельного
крена;
QH - начальный крен судна;
Л Q -изменение крена, необходимое для определения метацентрической высоты (например, 1,5°).
Знак (±) зависит от начального крена: знак ( + ), если начальный крен на тот борт, на который будет производиться накренение судна, знак (-), если начальный крен на противоположн1у1Й борт, от того, на который будет производиться накренение судна.
Далее оператор включает на пульте 6 управления рампой кнопку «Пуск, и рампа 5 начинает опускаться. При достижении значения крена, заданного в задающем устройстве, сигнализатор предельного угла крена 9 через коммутирующий блок 10 отключает на пульте 6 управления рампой кнопку «Пуск и рампа останавливается.
С кренометра 1 через индикатор 2 в блок вычисления передается значение крена Q. С осадкомеров 3 через индикатор 4 передается значение осадки в блок 11 вычисления.
С устройства 7 контроля угла рампы через индикатор 8 передается значение момента, вызвавшего крен судна Q в блок 11 вычисления. В блок 1 вычисления происходит определение водоизмещения D в зависимости от осадки судна и расчет значения метацентрической высоты h по формуле
h - 523 Мк ,
ав
где Мкр - кренящий момент.
Применение такой системы на судах с рампой позволяет более точно определить метацентрическую высоту и уменьшить трудоемкость этого определения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аксютин Л | |||
| Р | |||
| Контроль остойчивости морского судна | |||
| М., «Транспорт, 1974. | |||
