Изобретение относится к техническим средствам контроля остойчивости судна и может быть использовано для судов, находящихся в эксплуатации при проведении грузовых операций у причала и на рейде.
Известен расчетный способ определения метацентрической высоты судна (см. Аксютин Л.Р. Грузовой план судна. Одесса, Ластар, 1999, с.16-21) при грузовых операциях, при котором в расчетный блок вводят координаты центра тяжести и вес всех грузовых единиц, расположенных на судне, и высчитывают значение метацентрической высоты. Этот метод не точен, поскольку изначально вес каждой грузовой единицы определяется с погрешностью, а координаты центра тяжести сложных грузов, например контейнеров, определить точно практически невозможно.
За прототип способа принят способ определения метацентрической высоты по авторскому свидетельству СССР №1560449. По этому способу определение метацентрической высоты h осуществляют с помощью кренования судна определенным моментом кренования Мкр, после определения водоизмещения D судна и приращения угла крена Δ Θ метацентрическую высоту h определяют по формуле h=Мкр/DΔ Θ .
Указанный способ точнее, чем расчетный, так как значение д0 определяют опытным путем для конкретной загрузки судна.
Известны системы для определения метацентрической высоты по авторским свидетельствам СССР № 1586953, 1586954, 1652183, 1138341, 927640, заявка WO 8602328. Эти устройства позволяют определить метацентрическую высоту судна с помощью кренования судна тем или иным способом с последующим вычислением необходимой величины.
За прототип принята система определения метацентрической высоты судна по авторскому свидетельству СССР №1560449, которая содержит блок кренования, блок управления, соединенный с блоком кренования и блоком питания, вычислительный блок, датчики осадки, крена, измерения момента, а также блоки, позволяющие получить значение метацентрической высоты судна по результатам нескольких измерений. Это устройство позволяет повысить точность определения метацентрической высоты судна.
Недостатки способа-прототипа, а также устройства, принятого за прототип, следующие.
При эксплуатационном креновании возникает рассогласование сигналов с датчиков угла крена, момента и осадки. Как правило, сигнал с датчиков угла крена из-за инерционности судна отстает по времени. Время отставания зависит от состояния судна, его возраста, степени обрастания корпуса, наличия свободных поверхностей жидкости в различных емкостях. Это время различно также для разной загрузки судна. Кроме того, для использования известного решения необходимо длительное время для проведения нескольких креновании и расчета метацентрической высоты. Это допустимо при ходовых испытаниях и проблематично при ограниченном времени проведения эксплуатационных кренований.
Предлагаемое изобретение позволяет решить задачу повышения точности и сокращения времени определения метацентрической высоты судна в эксплуатационных условиях ограниченного времени, например при погрузке судна, когда требуется взять максимальный груз и оптимально разместить его за ограниченное время нахождения у причала.
Так же, как и прототип, способ определения метацентрической высоты судна водоизмещением D осуществляют путем кренования судна моментом Мкр и определения приращения угла крена Δ Θ , а метацентрическую высоту рассчитывают по формуле h=Мкр/DΔ Θ .
Отличие состоит в том, что одновременно с кренованием судна определяют скорость изменения приращения угла крена, и измерение приращение угла крена проводят при нулевой скорости его изменения.
Так же, как и прототип, система определения метацентрической высоты судна содержит датчики момента, водоизмещения и угла крена, блок обработки данных, соединенный с вычислительным блоком, а также блок накренения судна.
Отличие системы состоит в том, что она дополнительно содержит ключи, расположенные соответственно между выходами датчиков момента, водоизмещения, угла крена и входами блока обработки данных, а также блок согласования временных сигналов, вход которого соединен с выходом датчика угла крена, а выход - с управляющими входами ключей.
Отличие состоит также в том, что блок согласования временных сигналов состоит из последовательно соединенных вычислителя статистического угла крена и блока определения скорости изменения статического угла крена.
Заявленная совокупность существенных признаков позволяет решить задачу повышения точности и сокращения времени определения метацентрической высоты судна, поскольку сигналы со всех датчиков поступают в вычислительный блок сразу после завершения переходных процессов, возникающих на судне при проведении эксплуатационного кренования.
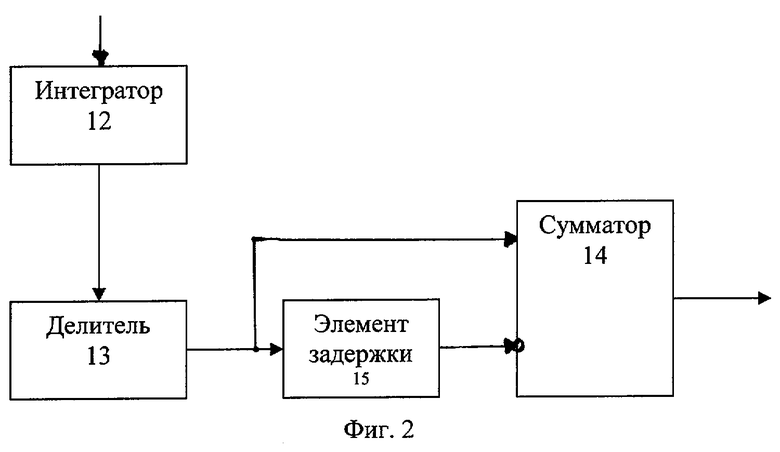
На фиг.1 представлена схема предлагаемой системы определения метацентрической высоты судна; на фиг.2 - вариант выполнения блока согласования временных сигналов.
Предлагаемая система состоит из датчиков момента 1, водоизмещения 2, угла крена 3, выходы которых через соответствующие ключи 4, 5, 6 подключены через блок обработки данных 7 к входу вычислительного блока 8. К выходу датчика 3 угла крена подключен блок 9 согласования временных сигналов, выход которого соединен с управляющими входами ключей 4, 5, 6. Блок 9 согласования временных сигналов состоит из вычислителя 10 статического угла крена и блока 11 определения скорости изменения статического угла крена.
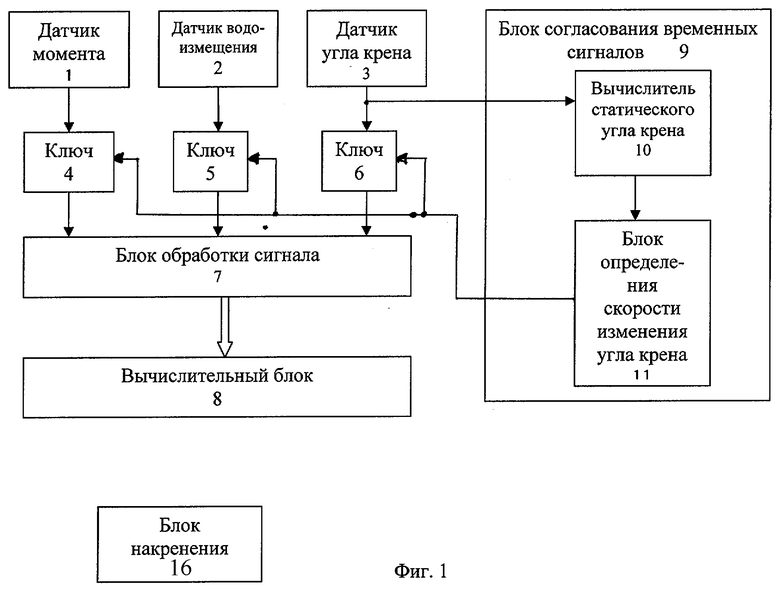
Один из вариантов выполнения блока 9 согласования временных сигналов, представленный на фиг.2, состоит из соединенных последовательно интегратора 12, делителя 13 и сумматора 14, второй вход которого соединен с выходом делителя 13 через элемент 15 задержки на один цикл.
Накренение судна осуществляют посредством блока накренения 16.
Блоки, используемые в решении, могут быть выполнены следующим образом.
Датчик момента, например уровнемер, установленный в калиброванном танке, предназначенном для эксплуатационного кренования.
В качестве датчика 2 водоизмещения могут быть использованы датчики осадки, контроля судовых запасов, отградуированные соответствующим образом. Датчик 3 угла крена - комплект из двух уровнемеров, расположенных по бортам судна в районе мидель-шпангоута. Блок 7 обработки данных - блок, позволяющий совместить сигналы от датчиков 1 - 3 с вычислительным блоком, например формирователь сигналов с интерфейсом. Вычислительный блок 8 - блок расчета h=Мкр/DΔ Θ . Ключи 4 - 6 - элементы совпадения или элементы И, которые не пропускают сигнал с датчиков 1-3 при наличии сигнала на управляющем входе и пропускают сигнал при нулевом сигнале. Блок 9 согласования временных сигналов может содержать, например, вычислитель статического угла крена 10, который осредняет колебания угла крена и блок 11 определения скорости изменения статического угла крена. В цифровом виде такая схема может быть реализована, например, так, как изображено на фиг.2. Если сигнал с датчика 3 угла крена аналоговый, в схему нужно включить аналого-цифровой преобразователь. Для придания кренящего момента судну используют блок накренения 16. Это может быть кран (а.с. СССР 927640), рампа (а.с. СССР 1138341). Наиболее распространен способ кренования судна путем перекачки жидкости из балластных танков одного борта в балластные танки другого борта.
Система работает следующим образом. Оператор включает насосы по перекачке жидкости блока 16 накренения судна. Переходный процесс накренения длится какое-то время. Это время зависит от различных факторов: состояния корпуса судна, его возраста, загрузки, наличия свободных водных поверхностей и прочих факторов, которые заранее учесть невозможно. Во время переходного процесса значение Θ нестабильно, изменяется во времени с колебаниями около среднего значения. В блоке 10 происходит вычисление среднего значения (статического угла крена), которое изменяется во времени с некоторой скоростью, измеряемой в блоке 11. Наличие сигнала на выходе блока 11 определения скорости изменения угла крена закрывает ключи 4, 5, 6. После окончания переходных процессов, когда указанная скорость становится равной нулю, открываются ключи 4-6 и сигналы с датчиков 1-3 поступают через блок 7 обработки данных (интерфейс) на вычислительный блок 8, где по формуле h=Мкр/DΔ Θ определяется метацентрическая высота.
Блок 9 согласования временных сигналов для цифровых сигналов с датчика 3 угла крена может быть таким, как на фиг.2. Если сигнал с датчика 3 угла крена аналоговый, следует поставить аналого-цифровой преобразователь. Статический угол крена, получаемый в интеграторе 12, в делителе 13 делится на i-тое число импульсов на i-тый момент времени. На входы сумматора 14 поступают импульсы Θ l непосредственно с делителя и Θ l - 1 - через элемент задержки 15 на один такт на инверсный вход сумматора 14. Когда Θ l≠Θ l - 1, сигнал на выходе сумматора не равен нулю и ключи 4-6 закрыты. Когда скорость изменения статического угла крена станет равной нулю, то есть Θ l=Θ l - 1, на выходе сумматора 14 будет ноль, ключи 4-6 пропускают сигналы с датчиков 1-3 на вход блока 7 обработки данных, и на входе вычислительного блока 8 появится значение метацентрической высоты h.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения метацентрической высоты подводных и надводных объектов и устройство электронного угломерного прибора для его осуществления | 2018 |
|
RU2670319C1 |
| Система определения метацентрической высоты судна | 1986 |
|
SU1560449A1 |
| Система определения метацентрической высоты судна | 1987 |
|
SU1586953A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| Система для контроля мореходных характеристик судна | 1983 |
|
SU1219446A1 |
| СПОСОБ КРЕНОВАНИЯ СУДНА ДЛЯ ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ | 1986 |
|
SU1384469A1 |
| Устройство для контроля метацентрической высоты судна с бортовой или угловой рампой | 1982 |
|
SU1138341A1 |
| АКТИВНЫЙ УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ СУДНА | 2015 |
|
RU2616505C1 |
| СПОСОБ КРЕНОВАНИЯ СУДОВ | 1973 |
|
SU385814A1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА В УСЛОВИЯХ ЭКСТРЕМАЛЬНОГО ВОЛНЕНИЯ | 2016 |
|
RU2647357C1 |
Изобретение относится к техническим средствам контроля остойчивости судна и может быть использовано для судов, находящихся в эксплуатации при проведении грузовых операций у причала и на рейде. Способ определения метацентрической высоты судна водоизмещением D осуществляют путем кренования судна моментом Мкр и определения приращения угла крена ΔΘ, а метацентрическую высоту рассчитывают по формуле h=Мкр/DΔΘ. Одновременно с кренованием судна определяют скорость изменения приращения угла крена, а измерение приращение угла крена проводят при нулевой скорости его изменения. Система для определения метацентрической высоты судна содержит датчики момента, водоизмещения и угла крена, блок обработки данных, соединенный с вычислительным блоком, блок накренения судна, ключи, расположенные соответственно между выходами датчиков момента, водоизмещения, угла крена и входами блока обработки данных, а также блок согласования временных сигналов, вход которого соединен с выходом датчика угла крена, а выход - с управляющими входами ключей. Достигается повышение точности и сокращение времени определения метацентрической высоты судна. 2 с. и 1 з.п. ф-лы, 2 ил.
| Система определения метацентрической высоты судна | 1986 |
|
SU1560449A1 |
| Система для контроля мореходных характеристик судна | 1983 |
|
SU1219446A1 |
| DE 3430765 А1, 06.03.1986. | |||

