I
Изобретение относится к способам оценки расположения органов управления самоходных машин, в частности, сельскохозяйственных машин, тракторов, строительных машин и автомобилей, и может быть использовано для оптимизации конструкции машин с эргономической точки зрений на предприятиях сельхозмашиностроения и транспортного машиностроения. Цель изобретения - повышение точности и упрощение процесса оценки путем обеспечения возможности геометрического сопоставления действитель-
ного и регламентированного расположе- 15 шкалой 8, установленной поворотно на
НИН органов управления..
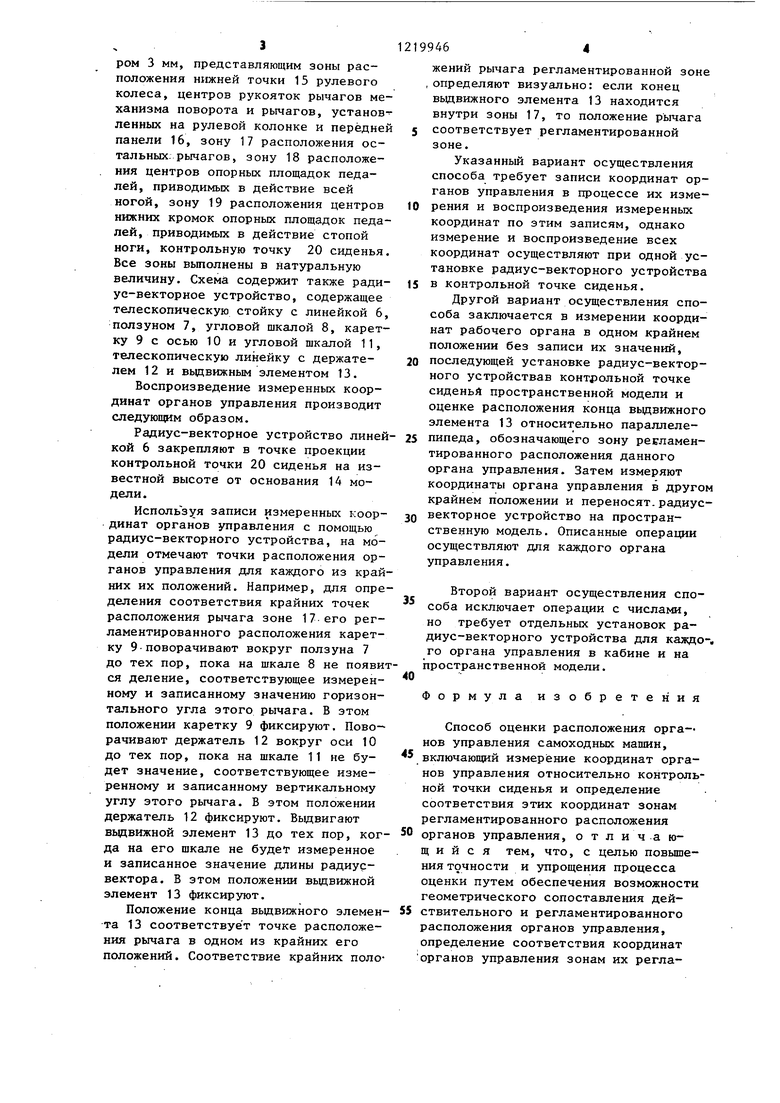
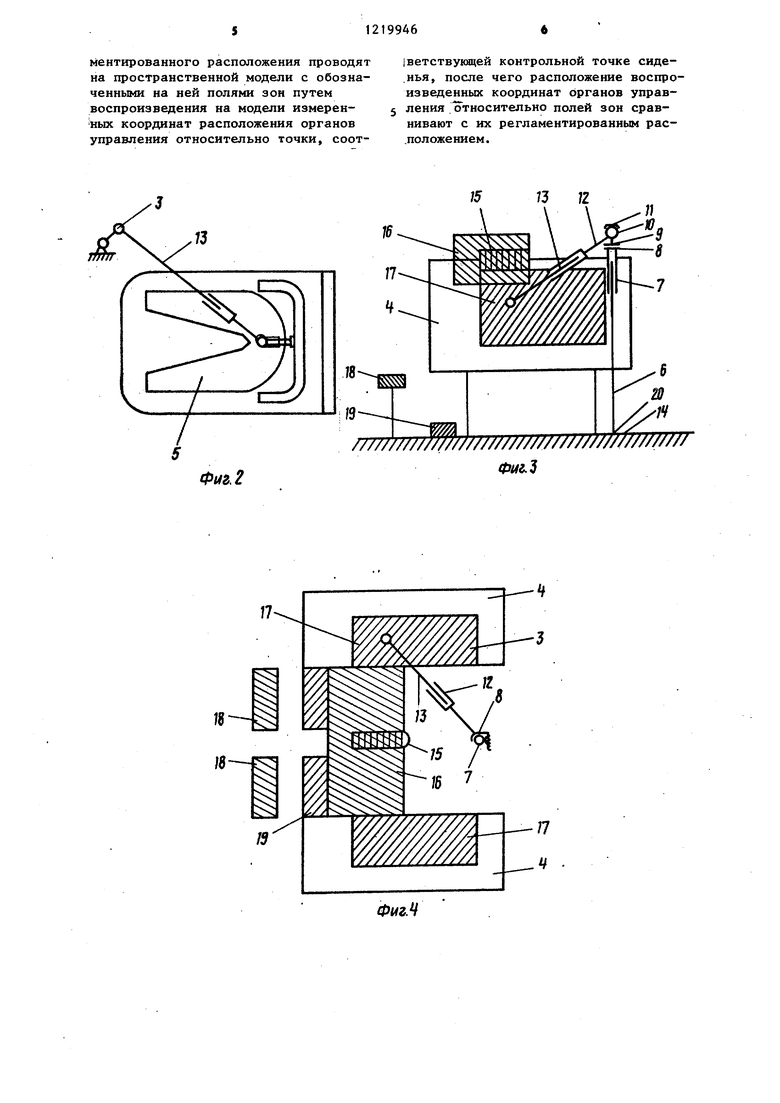
На фиг.1 представлена схема измерения координат органов управления в кабине машины с помощью радиус-векторного устройства, вид сбоку; на фиг.2 - то же, вид сверху; на фиг.5 - схема воспроизведения координат органов управления на пространственной модели зон регламентированного расположения органов управления с помощью радиус-векторного устройства, вид сбоку; на фиг.4 - то же, вид сверху.
Способ oifeHKH расположения органов управления самоходных машин включает определение местонахождения контрольной точки сиденья, измерение относительно последней координат органов управления в крайних их положениях и определение соответствия измеренных координат зонам регламентированного расположения органов управления, которое осуществляют на предваритель но построенной пространственной модели зон регламентированного расположения органов управления с отмеченной на ней контрольной точкой сиденья, причем сначала на зтой модели отмечают точки крайних положений каждого органа управления путем воспроизведения их измеренных координат от отмеченной на модели контрольной точки сиденья, а затем визуально определяют соответствие этих точек регламентированным зонам на модели.
Измерение координат органов управления в их крайних положениях относительно контрольной точки сиденья осуществляют с помощью любого трехкоор- динатного устройства, например радиус векторного (т.е. измеряющего одну линейную и две угловые координаты).
На полу 1 (фиг.1 и 2) смонтирова- .ны сиденье 2 оператора, органы 3
управления. На сиденье 2 смонтированы устройство 4 для определения точки отсчета сиденья, устройство 5 для определения контрольной точки сиденья и
радиус векторное устройство для измерения координат органов управления с подвижными относительно друг друга и снабженными фиксаторами иэfмepитeль- ными элементами: телескопической стойкой с линейкой 6, на которой нанесена шкала (не показана), и ползуном 7, установленным относительно линейки 6 с возможностью прямолинейного движения вдоль нее и снабженным угловой
ползуне 7 кареткой 9 с закрепленными на ней осью 10 и угловой шкалой 11, телескопической линейкой с поворотно установленным на оси 10 держателем 12 и вьщвижным элементом 13 с линейной шкалой (не показана), установленным в держателе 12 с возможностью прямолинейного движения вдоль него. Для определения первой угловой координаты рабочего органа 3 (горизонтального угла) каретку 9 поворачивают относительно ползуна 7. В этом положении каретку 9 закрепляют . на ползуне 7 и по угловой шкапе 9 отсчитывают величину горизонтального угла.
Для определения второй угловой координаты рабочего органа 3, вертикального угла и третьей линейной координаты его - длины радиус вектора держатель 12 телескопической линейки поворачивают относительно оси 10 с одновременным перемещением в нем вьщвижного элемента 13 до касания конца элемента 13 рабочего органа 3. В этом положении закрепляют держатель 12 на оси 10, а ввд- вижной элемент 13 - в держателе 12, и значения указанных координат отсчитывают по угловой шкале 11 и линейной шкале на ввдвижном элементе 13. Указанные операции повторяют для каждого из крайних положений рабочих органов, при этом записывают значения координат, считываемые со шкал.
На схеме (фиг.З и 4) представлена построенная для ряда машин пространственная модель зон регламенти- 55 рованного расположения рабочих органов, содержащая основание 14 и закрепленные на нем каркасы в виде параллелепипедов из проволоки диаметром 3 мм, представляющим зоны расположения нижней точки 15 рулевого колеса, центров рукояток рычагов механизма поворота и рычагов, установленных на рулевой колонке и передней панели 16, зону 17 расположения остальных, рычагов, зону 18 расположения центров опорных площадок педалей, приводимых в действие всей ногой, зону 19 расположения центров нижних кромок опорных площадок педалей, приводимых в действие стопой ноги, контрольную точку 20 сиденья Все зоны выполнены в натуральную величину. Схема содержит также радиус-векторное устройство, содержащее телескопическую стойку с линейкой 6, ползуном 7, угловой шкалой 8, каретку 9 с осью 10 и угловой шкалой 11, телескопическую линейку с держателем 12 и вьщвкжным элементом 13.
Воспроизведение измеренных координат органов управления производит следующим образом.
Радиус-векторное устройство линей- 25 пипеда, обозначающего зону рерламенкой 6 закрепляют в точке проекции контрольной точки 20 сиденья на известной высоте от основания 14 модели.
Исполь зуя записи измеренных координат органов управления с помощью радиус-векторного устройства, на модели отмечают точки расположения органов управления для каждого из крайних их положений. Например, для определения соответствия крайних точек расположения рычага зоне 17-его регламентированного расположения каретку 9-поворачивают вокруг ползуна 7 до тех пор, пока на шкале 8 не появится деление, соответствующее измеренному и записанному значению горизонтального угла этого рычага. В этом положении каретку 9 фиксируют. Поворачивают держатель 12 вокруг оси 10 до тех пор, пока на шкале 11 не будет значение, соответствующее измеренному и записанному вертикальному углу этого рычага. В этом положении держатель 12 фиксируют. Выдвигают
30
35
40
тированного расположения данного органа управления. Затем измеряют координаты органа управления в другом крайнем положении и переносят.радиус- векторное устройство на пространственную модель. Описанные операции осуществляют для каждого органа управления.
Второй вариант осуществления способа исключает операции с числами, но требует отдельных установок радиус-векторного устройства для каждого органа управления в кабине и на пространственной модели.
Формула изобретения
Способ оценки расположения органов управления самоходных машин, 5 включающий измерение координат органов управления относительно контрольной точки сиденья и определение соответствия этих координат зонам регламентированного расположения
вьдвижной элемент 13 до тех пор, ког- 50 органов управления, отличаюда на его шкале не будет измеренное и записанное значение длины радиус- вектора. В этом положении вьдвижной элемент 13 фиксируют.
Положение конца вьщвижного элемента 13 соответствует точке расположения рычага в одном из крайних его положений. Соответствие крайних положений рычага регламентированной зоне определяют визуально: если конец вьдвижного элемента 13 находится внутри зоны 17, то положение рычага
соответствует регламентированной зоне.
Указанный вариант осуществления способа требует записи координат органов управления в процессе их измерения и воспроизведения измеренных координат по этим записям, однако измерение и воспроизведение всех координат осуществляют при одной установке радиус-векторного устройства
в контрольной точке сиденья.
Другой вариант осуществления способа заключается в измерении координат рабочего органа в одном крайнем положении без записи их значений,
последующей установке радиус-векторного устройствав контрольной точке сиденьА пространственной модели и оценке расположения конца выдвижного элемента 13 относительно параллеле
тированного расположения данного органа управления. Затем измеряют координаты органа управления в другом крайнем положении и переносят.радиус- векторное устройство на пространственную модель. Описанные операции осуществляют для каждого органа управления.
Второй вариант осуществления способа исключает операции с числами, но требует отдельных установок радиус-векторного устройства для каждо, го органа управления в кабине и на ространственной модели.
ормула изобретения
Способ оценки расположения органов управления самоходных машин, 5 включающий измерение координат органов управления относительно контрольной точки сиденья и определение соответствия этих координат зонам регламентированного расположения
щ и и с я тем, что, с целью повышения точности и упрощения процесса оценки путем обеспечения возможности геометрического сопоставления дей- 55 ствительного и регламентированного расположения органов управления, определение соответствия координат органов управления зонам их регламентированного расположения проводят на пространственной модели с обозначенными на ней полями зон путем воспроизведения на модели измерен- ных координат расположения органов управления относительно точки, соот|ветствукицей контрольной точке сиде- ,нья, после чего расположение воспроизведенных координат органов управ- 5 ления Соотносительно полей зон сравнивают с их регламентированным рас- .положением.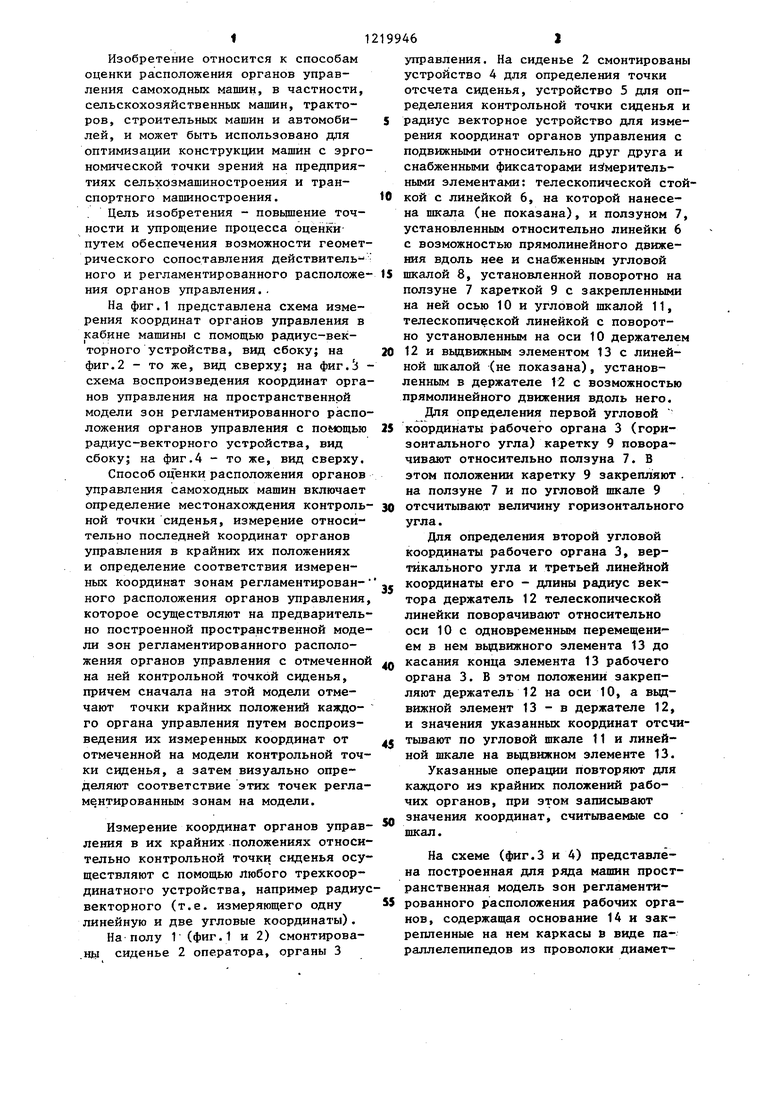
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров рабочего места и оценки позы оператора | 1981 |
|
SU982653A1 |
| Устройство для исследования эргономических параметров кабин | 1988 |
|
SU1531989A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭРГОНОМИЧНОСТИ ОРГАНОВ УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2133019C1 |
| Устройство для измерения параметров обзорности кабины | 1972 |
|
SU469907A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЛЮФТА И УСИЛИЯ НА РУЛЕВОМ КОЛЕСЕ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2273012C2 |
| Устройство для регистрации отклонений рабочего органа сельхозмашины от рядка растений | 1986 |
|
SU1441166A1 |
| Устройство для измерений мгновенных угловых перемещений качающейся платформы | 2016 |
|
RU2642975C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| Тренажер глазомерного определения положения буровой штанги относительно забоя | 2015 |
|
RU2615190C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 2012 |
|
RU2509988C1 |
Изобретение относится к способам оценки расположения органов управления самоходных машин. Цель изобретения - повышение точности и упрощение процесса оценки путем обеспечения возможности геометрического сопоставления действительного и регламентированного расположения органов управления. Определяют местонахождение контрольной точки сиденья. Измеряют относительно последней координаты органов управления в крайних их положениях и определяют соответствие измеренных координат зонам регламентированного расположения органов управления, которое осуществляют на построенной пространственной модели зон. Сначала на модели отмечают точки крайних положений каждого органа управления, затем визуально определяют соответствие этих точек регламентированным зонам на модели. Для определения первой угловой координаты рабочего органа 3, вертикального угла и третьей линейной координат держатель 12 телескопической линейки поворачивают относительно оси 10 с одновременным перемещением в нем выдвижного злемента 13 до касания рабочего органа 3. 4 ил. (Л « со 4 о 
Фаг. 2
/3 1Z
п
/777/7/////////////////////////////////////////
Фаг.3
ФигМ
| Устройство для определения параметров рабочего места и оценки позы оператора | 1981 |
|
SU982653A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
