Изобретение относится к области железнодорожного транспорта и предназначено для контроля и оценки состояния железнодорожных путей.
Известно устройство для определения исправности рельсового пути, монтируемое на путевой машине с опорными рельсовыми тележками, содержащее установленные на измерительных тележках лазерные излучатели, один из которых установлен по одну сторону от фотоприемника на одной прямой с ним, параллельной продольной оси путевой машины, в котором фотоприемник установлен на подвижной части нагрузочного приспособления, размещенной между опорными тележками путевой машины, а второй лазерной излучатель с измерительной тележкой размещен по другую сторону от фотоприемника на одной прямой с ним, параллельной продольной оси путевой машины, причем лазерные излучатели установлены на равных расстояниях от фотоприемника, закреплены на измерительных тележках шарнирно и выполнены со стабилизацией их положения в горизонтальной плоскости (SU 1796514, B61K 9/08, 1993).
Недостатком устройства является ограниченность его использования только для определения просадок рельсов и невозможность измерения ширины колеи.
Наиболее близким по технической сущности и достигаемому результату является устройство для контроля состояния рельсового пути, содержащее два датчика вертикальных ускорений букс, установленных на корпусах букс одной из колесных пар в некотловой части вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова, установленные на наружной поверхности днища вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения ширины колеи, установленные на неподрессорной раме колесной тележки в некотловой части вагона-путеизмерителя, два датчика вертикальных перемещений букс относительно кузова, установленные на кузове вагона-путеизмерителя над буксами колесной пары в его некотловой части, датчик пройденного пути, установленный на корпусе одной из букс измерительной колесной пары, и установленный на борту вагона-путеизмерителя контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину (ПЭВМ), в него введены бесплатформенная инерциальная навигационная система, установленная в некотловой части вагона-путеизмерителя, спутниковая навигационная система, радиолокатор, включающий приемопередающую станцию, установленную на борту вагона-путеизмерителя и пассивных приемоответчиков, установленных на контрольных объектах, расположенных вдоль железнодорожного пути, а в контрольно-вычислительный комплекс введены первый и второй контроллеры, контроллер вычисления параметров пути, блок текущего времени, блок данных результатов контроля, принтер и пульт оператора, причем первый и второй датчики вертикальных ускорений букс подключены соответственно к первому и второму входам первого контроллера, первый и второй бесконтактные датчики оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова подключены соответственно к третьему и четвертому входам первого контроллера, первый и второй бесконтактные датчики оптического диапазона волн измерения ширины колеи подключены соответственно к пятому и шестому входам первого контроллера, первый и второй датчики вертикальных перемещений букс относительно кузова подключены соответственно к седьмому и восьмому входам первого контроллера, датчик пройденного пути подключен к первому входу ПЭВМ, вход и выход бесплатформенной инерциальной навигационной системы соединены соответственно с первым выходом и с первым входом второго контроллера, второй вход и второй выход которого соединены соответственно с выходом и входом радиолокатора, спутниковая навигационная система подключена к третьему входу второго контроллера, вход блока текущего времени соединен с вторым входом ПЭВМ и с четвертым входом второго контроллера, второй выход ПЭВМ соединен с девятым входом первого контроллера и с пятым входом второго контроллера, первые входы-выходы ПЭВМ, входы-выходы первого и второго контроллеров соединены с входами-выходами контроллера вычисления параметров пути, вторые и третьи входы-выходы ПЭВМ соединены соответственно с входами-выходами блока данных результатов контроля и с входами-выходами пульта оператора, второй выход ПЭВМ подключен к принтеру (RU 2114950, B61K 9/08, 1998).
Недостаток мобильного комплекса состоит в невозможности получить текущие значения силовых факторов динамического взаимодействия подвижного состава при измерении геометрических размеров железнодорожного пути, кроме того не измеряются текущие значения профиля пути.
Технический результат изобретения заключается в расширении области использования мобильного комплекса за счет измерения профиля железнодорожного пути на участках его подъема и опускания.
Технический результат достигается тем, что мобильный комплекс для диагностирования железнодорожного пути, состоящий из самоходного транспортного средства, на котором смонтированы измеритель ширины железнодорожного пути и устройство для измерения параметров профиля железнодорожного пути, которые через соответствующие блоки обработки сигналов соединены с микропроцессором, к которому подключено устройство определения координат, согласно изобретению оснащен блоком дистанционного управления, соединенным посредством канала связи с приемником, подключенным к микропроцессору для управления приводом самоходного транспортного средства, которое выполнено составным из двух тележек, причем вторая тележка дополнительно снабжена вертикально установленной линейкой и навигационным приемником, а на первой тележке установлен точечный оптический лазерный прибор, рамы тележек оснащены стыковочными узлами для разъема и соединения тележек, каждый из которых выполнен в виде чашки и штыря, раздельно установленных на соответствующих рамах тележек.
Измеритель ширины железнодорожного пути состоит из двух оптических лазерных приборов, смонтированных под рамой первой тележки над соответствующими головками рельсов.
Каждый оптический лазерный прибор измерителя ширины железнодорожного пути выполнен матричным.
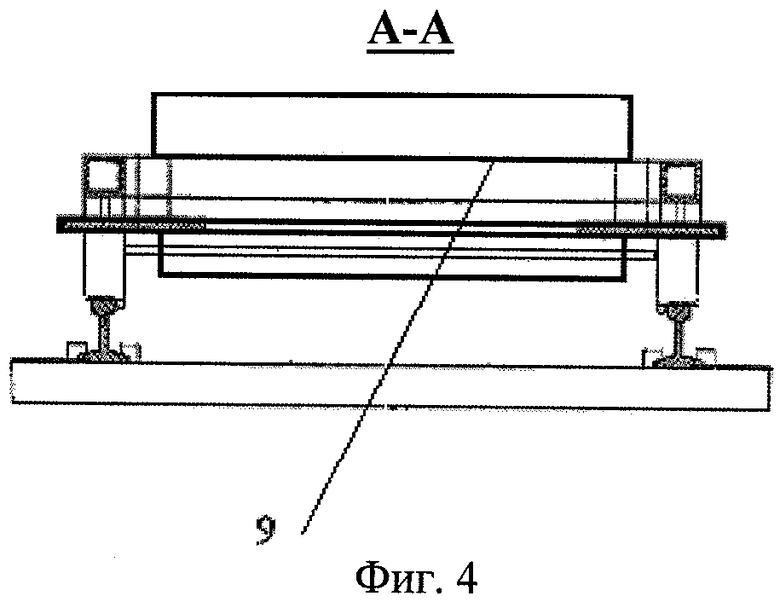
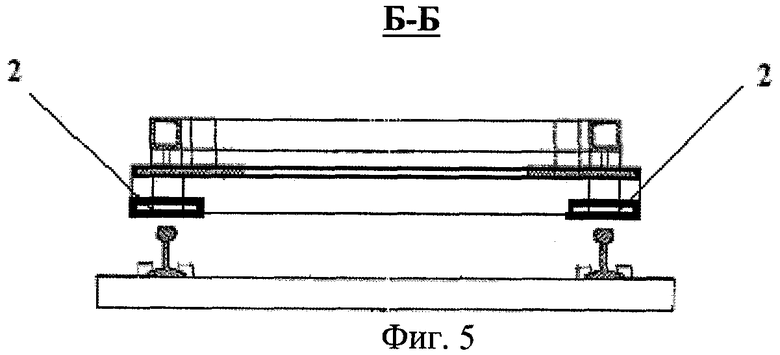
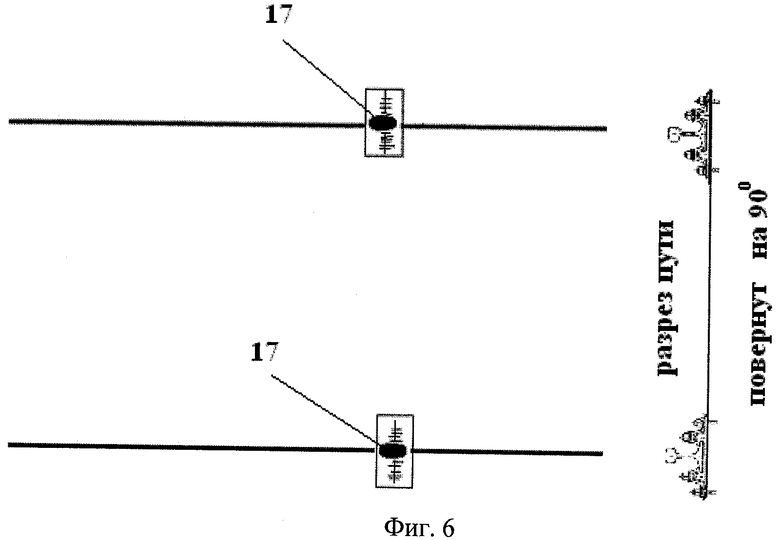
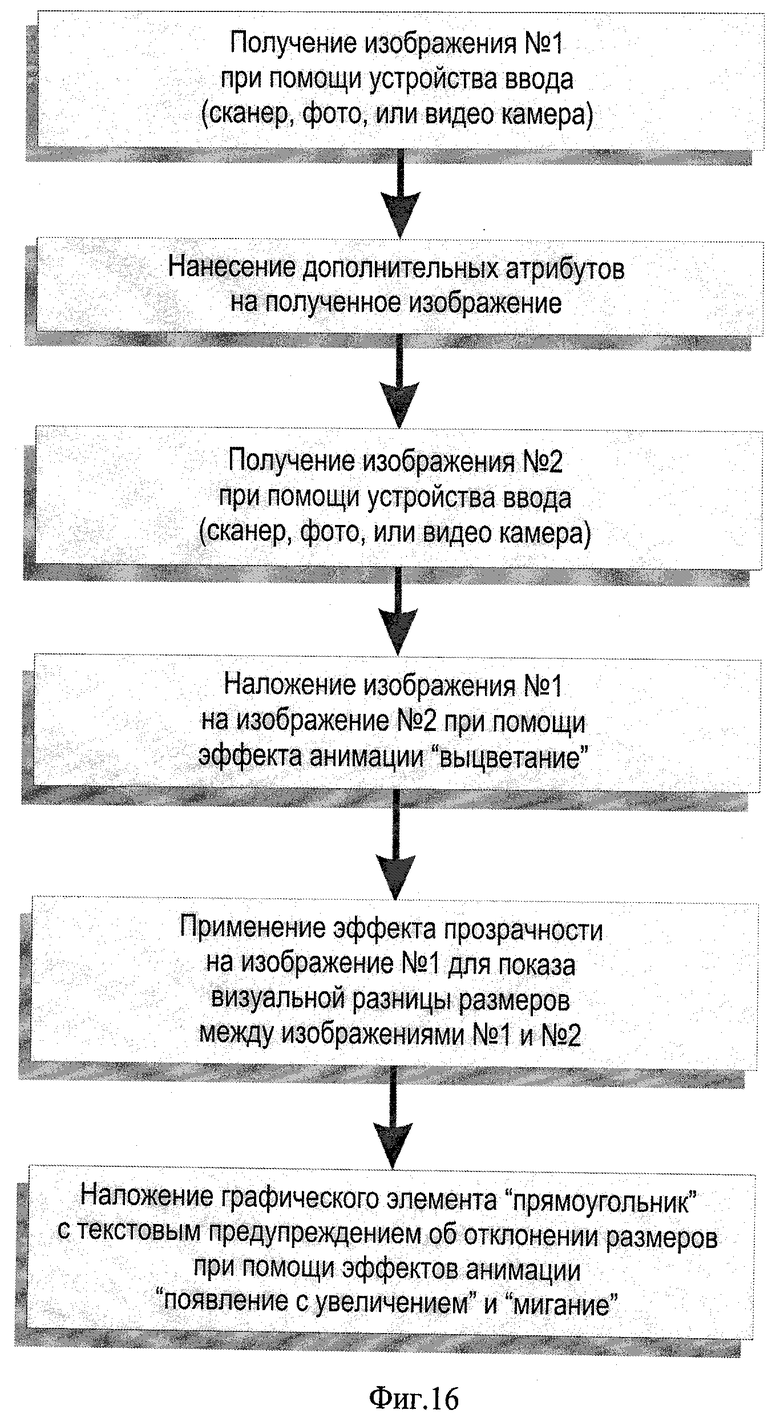
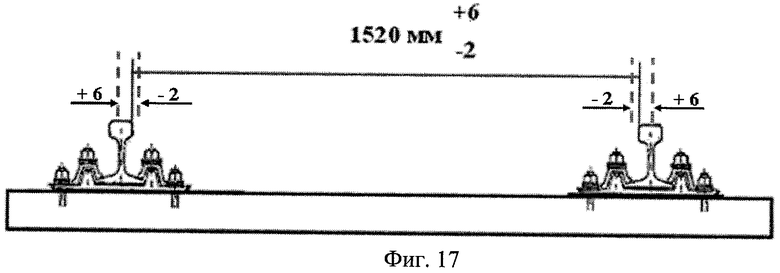
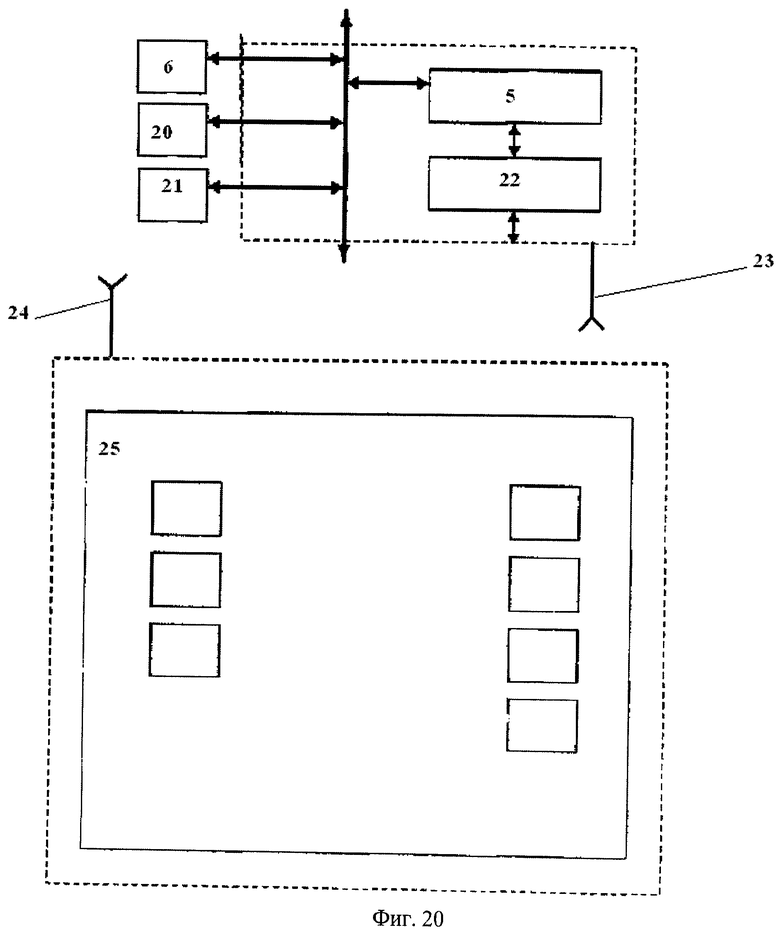
На фиг.1 показан общий вид мобильного комплекса; на фиг.2 - схема управления; на фиг.3 - вид сверху сцепленных тележек; на фиг.4 - сечение по А-А на фиг.3; на фиг.5 - сечение по Б-Б на фиг.3; на фиг.6 - схема работы измерителя; на фиг.7 - стыковочный узел в открытом положении, вариант 1; на фиг.8 - стыковочный узел в закрытом положении, вариант 1; на фиг.9 - стыковочный узел в открытом положении, вариант 2; на фиг.10 - схема раскладывания штыря стыковочного узла, вариант 2; на фиг.11 - стыковочный узел в закрытом положении, вариант 2, на фиг.12 - схема измерения ширины колеи; на фиг.13 - вторая тележка, вид спереди; на фиг.14 - вторая тележка, вид сбоку; на фиг.15 - размещение фотоприемников на линейке; на фиг.16 - алгоритм сравнения изображений ширины колеи пути; на фиг.17 - нормативное изображение ширины пути; на фиг.18 - наложение изображений ширины пути с выдачей предупреждающего сигнала; на фиг.19 - передача предупреждения путейцу и на фиг.20 - блок-схема мониторинга состояния пути.
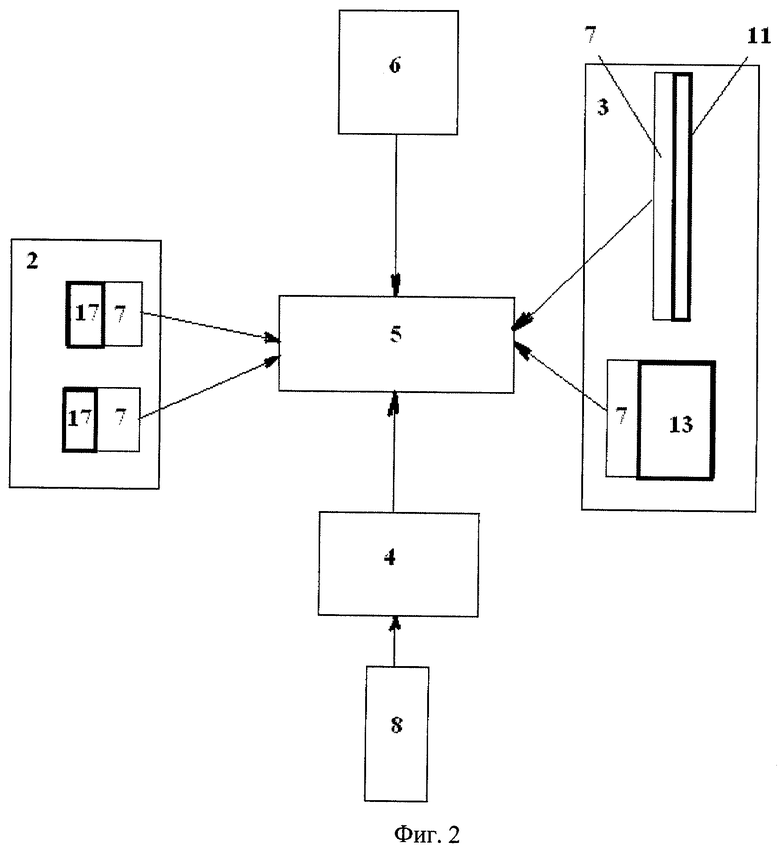
Мобильный комплекс для диагностирования железнодорожного пути состоит из самоходного транспортного средства 1, на котором смонтированы измеритель 2 ширины железнодорожного пути и устройство 3 для съема профиля железнодорожного пути, приводы 4, микропроцессор 5, устройство определения координат 6 и блоки 7 обработки сигналов.
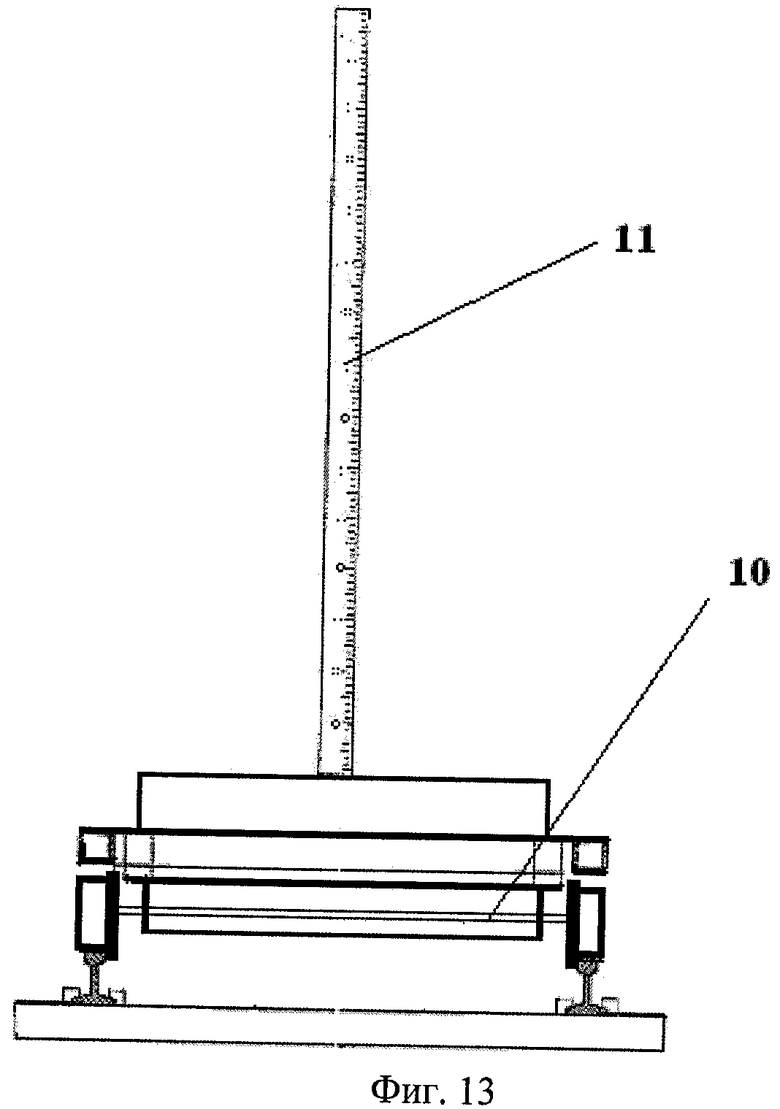
Мобильный комплекс оснащен блоком дистанционного управления 8, подключенным к микропроцессору 5 для управления приводом самоходного транспортного средства 1, которое выполнено составным из двух тележек 9 и 10. Тележка 10 снабжена вертикально установленной линейкой 11 и навигационным приемником 12. На тележке 9 установлен точечный оптический лазерный прибор 13. Причем рамы тележек 9 и 10 оснащены стыковочными узлами 14 для их разъема и соединения, каждый из которых выполнен в виде чашки 15 и штыря 16, раздельно установленных на различных рамах.
Измеритель 2 ширины железнодорожного пути состоит из двух оптических лазерных приборов 17, смонтированных под рамой первой тележки 9 над соответствующими головками рельсов 18.
Устройство 3 для съема профиля железнодорожного пути состоит из вертикально установленной на второй тележке 10 линейки 11 и установленного на первой тележке 9 точечного оптического лазерного прибора 13, причем линейка 11 оснащена набором фотоприемников 19, размещенных на делениях ее шкалы.
Каждый оптический лазерный прибор 17 измерителя 2 ширины железнодорожного пути выполнен матричным, например, из лазерных диодных модулей Института общей физики РАН, и подключен через соответствующий блок 7 обработки сигналов к микропроцессору 5.
Фотоприемники 19, вмонтированные в шкалу линейки 11, подключены через соответствующий блок 7 обработки сигналов к микропроцессору 5.
Устройство определения координат 6 включает навигатор 20 и базу данных 21 цифровых электронных карт участков железнодорожных путей. Первый порт микропроцессора 5 соединен с портом сервера 22, связанного через канал связи посредством антенны 23 с антеннами 24 приемопередатчиков 25 в виде смартфонов, а второй порт микропроцессора 5 соединен с навигатором 20 устройства определения координат 6.
На тележках 9 и 10 установлены приводы 4 перемещения, управляемые от блока 8 дистанционного управления.
В электронной памяти находится база данных 21 с цифровыми электронными картами железнодорожных путей участков, относящихся к зоне обслуживания данной службы пути. Микропроцессор 5 соединен с портом сервера 22, связанного через канал связи с приемопередатчиками 25, входящими в состав носимых терминалов руководителей путевых бригад.
В электронной памяти каждого носимого терминала размещены текстовые и фотографические файлы технического задания для соответствующей путевой ремонтной бригады и локальная база данных с цифровой электронной картой железнодорожных путей участков проведения работ. На карте элементы пути, подлежащие ремонту данной путевой ремонтной бригадой, ассоциированы с их железнодорожными пикетными и навигационными координатами. При этом в электронной памяти каждого носимого терминала инсталлировано программное приложение поддержки обмена файлами между носимым терминалом и компьютером оператора диспетчерского пункта.
Функции программного интерфейса пользователя операционной системы связаны с программными приложениями встроенных электронных модулей фотовидеокамеры и спутникового навигатора 20.
Мобильный комплекс для диагностирования железнодорожного пути работает следующим образом.
При движении по железнодорожному пути самоходного транспортного средства из двух сцепленных тележек 9 и 10 осуществляется измерение ширины колеи пути измерителем ширины 2 и уклонов пути в вертикальной плоскости устройством 3 для съема профиля. С помощью установленного на тележке 9 устройства определения географических координат 6 определяют ее местонахождение.
Двумя лазерными приборами 17, установленными над головками рельсов, определяют расстояние до внутренних их краев путем фиксации приемников на матрице, измеряющих границы расстояний до головок рельсов 18 от их подошв. Расстояние между приемниками на матрице строго зафиксировано относительно креплений на тележке 9. Сигналы от приемников лазерных приборов 17 обрабатываются в блоках 7 и поступают в микропроцессор 5, который вычисляет размер измеренной ширины колеи железнодорожного пути в конкретном месте под тележкой 9. Лучи каждого лазерного прибора 17 направлены перпендикулярно поверхности головки рельса 18 и параллельны между собой (фиг.12).
Автоматически определяется положение излучателей с приемниками на матрицах лазерных приборов 17, совпадающее с внутренними краями головок рельсов 18. По их известным относительно конструкции тележки 9 расстояниям вычисляется истинная ширина рельсовой колеи. Данные по конструктивным размерам тележки 9 и пространственному размещению на ней лазерных приборов 17 заложены в базе данных 21.
На прямых участках железнодорожного пути мобильный комплекс производит непрерывную запись сигналов от приемников лазерных приборов 17. Эти сигналы обрабатываются и вводятся в виде изображения поперечного сечения железнодорожного пути в микропроцессор 5. В это же время данные по местонахождению тележек 9 и 10 непрерывно поступают из навигатора 20.
В местах, где измеренная ширина колеи рельсового пути превышает допустимые значения 1520+6 -2 мм, запрашивают данные по ширине пути этого места со спутника. В микропроцессоре 5 производится сравнение двух изображений. Если данные расхождения подтверждаются, то микропроцессор 5 формирует предупреждающий сигнал (фиг.16).
Этот сигнал поступает на передатчик с антенной 23 и по каналу связи на носимый терминал путейского рабочего. Путейцы принимают меры по устранению расхождений в размерах ширины колеи железнодорожного пути.
Тележка 9 не имеет подрессоренной подвески и поэтому ее скорость может быть достаточно большой. Неровности пути при этом можно записать при помощи лазерных уровней типа Black, Nedo, Stabila, Robotoolz и другими.
Сигналы записываются непрерывно и передаются на носимые терминалы путейских рабочих, которыми устраняются выявленные недостатки.
На кривых участках пути измерение ширины пути производится указанным способом, так как измерение производится лазерными приборами 17 под тележкой 9 между ее колесами. Длина матрицы лазерного прибора 17 должна перекрывать выносы и заходы рельса в кривых участках пути под тележку 9, чтобы все время отслеживать внутренние края соответствующей головки рельса 18. Движение тележки 9 возможно за счет выполнения осей с колесами поворотными в горизонтальной плоскости, например, на шкворнях, как это выполнено у двухосных тележек вагонов.
На тележки 9 с малой базой ее колеса крепят на кронштейнах рамы без всяких шарниров, шкворней и уключин.
Измерение величины уклона на фиксированных участках железнодорожного пути производят при помощи точечного лазерного прибора 13, установленного на тележке 9 и линейки 11, вертикально установленной на тележке 10. Вертикальная установка линейки 11 обеспечивается за счет перенесения ее центра тяжести на раму тележки для повышения устойчивости. Оператор дистанционно управляет перемещением тележек 9 и 10. Тележка 10 в этом случае отцепляется от тележки 9 и отъезжает на необходимое для замеров уклонов расстояние.
С помощью навигационного приемника 12, установленного на тележке 10 и связанного через канал связи с устройством определения координат 6, определяют дальность расположения тележки 10 от тележки 9.
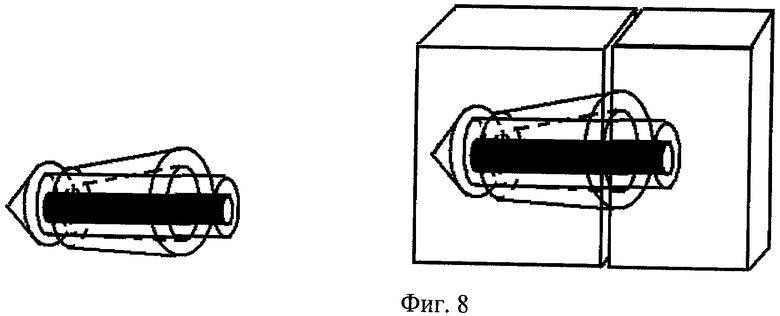
При этом чашки 15 на тележке 9 отпускают штыри 16, смонтированные на тележке 10, и тем самым размыкаются стыковочные узлы 14. На фиг.7 и 8 приведен вариант стыковки с помощью надувных штырей 16, которые увеличиваются в объеме при дистанционной работе насоса и фиксируются в чашках 15.
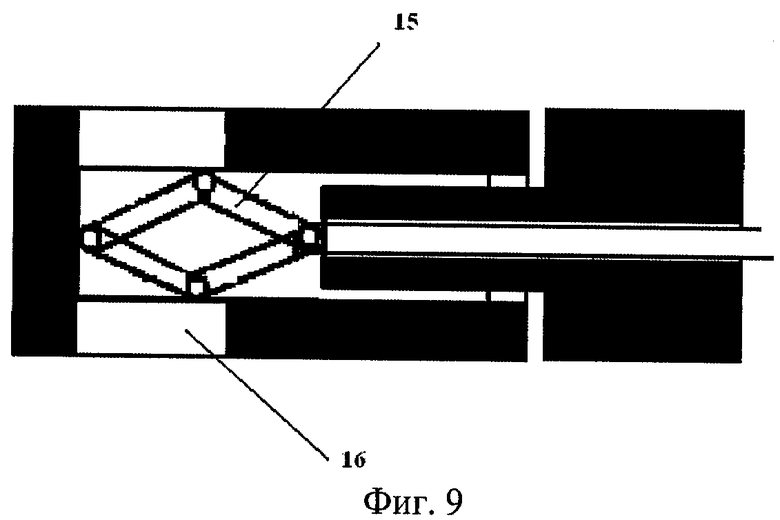
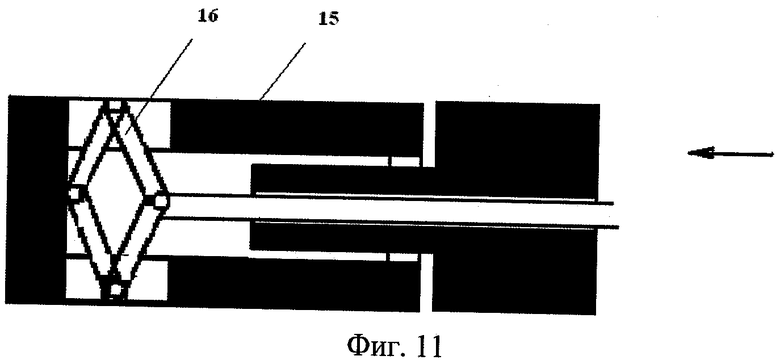
На фиг.9-11 штырь представляет собой шарнирный четырехугольник, который раскладывается и складывается в пазах чашки 15 горизонтальной приводной тягой (привод на чертежах не показан).
Угол наклона рельсового пути α определяется по формуле:
tgα=Δh/D
где Δh - превышение или понижение линейки 11 в делениях шкалы,
D - расстояние (дальность расположения) до линейки 11 от тележки 9.
Например, примем Δh=20 см, D=100 мм. Тогда α=arctg 20/10000=0,11°.
При Δh=10 см, D=10 м. Тогда α=arctg 10/1000=0,57°.
Сигнал от излучателя лазерного прибора принимается одним из фотоприемников, встроенных в деления линейки 11. Далее сигнал преобразуется в одном из блоков обработки сигналов в угол наклона. Устройство для съема профиля железнодорожного пути работает как лазерный дальномер с отсчетом вертикального перемещения линейки 11.
Данные по уклонам пути передаются в микропроцессор 5 для последующей обработки и передачи в носимые терминалы путейским рабочим.
На основе результатов диагностирования железнодорожного пути с использованием наземных мобильных средств диагностики и космических средств дистанционного зондирования регистрируются и выявляются дефекты и их местоположение с привязкой к цифровой электронной карте железнодорожных путей по железнодорожным пикетным и абсолютным координатам системы ГЛОНАСС/GPS/GALILEO. На компьютере оператора диспетчерского пункта службы пути подготавливаются технические задания для путевых ремонтных бригад на проведение соответствующих ремонтных работ. Технические задания для ремонтных бригад формируют в виде наборов текстовых и фотографических файлов, которые заносят в носимые терминалы каждого руководителя путевых ремонтных бригад. В процессе выполнения технического задания координатные и фотографические данные из технического задания используются для контроля правильности идентификации элементов, подлежащих ремонту. Для этого руководитель соответствующей путевой ремонтной бригады или его заместители выполняют фотографирование ремонтируемых элементов в согласованных с техническим заданием ракурсах и масштабах и пересылают снимки вместе с информацией о реальных координатах элементов и глобальном текущем времени выполнения снимков.
Использование сотовой телефонной связи или Интернет для пересылки файлов и сообщений определяется объемом передаваемой информации или доступностью каналов связи. Например, для передачи фотовидеоинформации Интернет является предпочтительным, а для телефонных переговоров предпочтительнее сотовая телефонная связь из-за меньших ограничений по сравнению с сетью системы Wi-Fi по зонам наличия устойчивой связи.
Эффективность мобильного комплекса для диагностирования железнодорожного пути заключается в расширении и непрерывном измерении основных геометрических размеров железнодорожного пути, а именно ширины колеи и уклонов при помощи установленных на тележках оптических лазерных приборов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| СИСТЕМА ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2012 |
|
RU2519322C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИРИНЫ КОЛЕИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442714C1 |
| Робот-сигналист и система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути | 2023 |
|
RU2817645C1 |
| Робот-сигналист и система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути | 2022 |
|
RU2791772C1 |
| СПОСОБ КОНТРОЛЯ ПОПЕРЕЧНОГО ПРОФИЛЯ И РАССТОЯНИЯ МЕЖДУ РЕЛЬСАМИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ВАГОН-ПУТЕИЗМЕРИТЕЛЬ | 2010 |
|
RU2418705C1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО НА ЖЕЛЕЗНОДОРОЖНОМ ХОДУ | 1998 |
|
RU2152469C1 |
| Система закрепления составов на путях железнодорожной станции | 2016 |
|
RU2618656C1 |








Изобретение относится к области железнодорожного транспорта и предназначено для контроля и оценки состояния железнодорожных путей. Мобильный комплекс для диагностирования железнодорожного пути состоит из самоходного транспортного средства, на котором смонтированы измеритель ширины железнодорожного пути и устройство для измерения параметров профиля железнодорожного пути, которые через соответствующие блоки обработки сигналов соединены с микропроцессором, к которому подключено устройство определения координат. Мобильный комплекс оснащен блоком дистанционного управления, соединенным посредством канала связи с приемником, подключенным к микропроцессору для управления приводом самоходного транспортного средства. Самоходное транспортное средство выполнено составным из двух тележек, причем вторая тележка дополнительно снабжена вертикально установленной линейкой и навигационным приемником, а на первой тележке установлен точечный оптический лазерный прибор. Рамы тележек оснащены стыковочными узлами для разъема и соединения тележек, каждый из которых выполнен в виде чашки и штыря, раздельно установленных на соответствующих рамах тележек. В результате улучшается точность измерения профиля железнодорожного пути на участках его подъема и опускания. 2 з.п. ф-лы, 20 ил.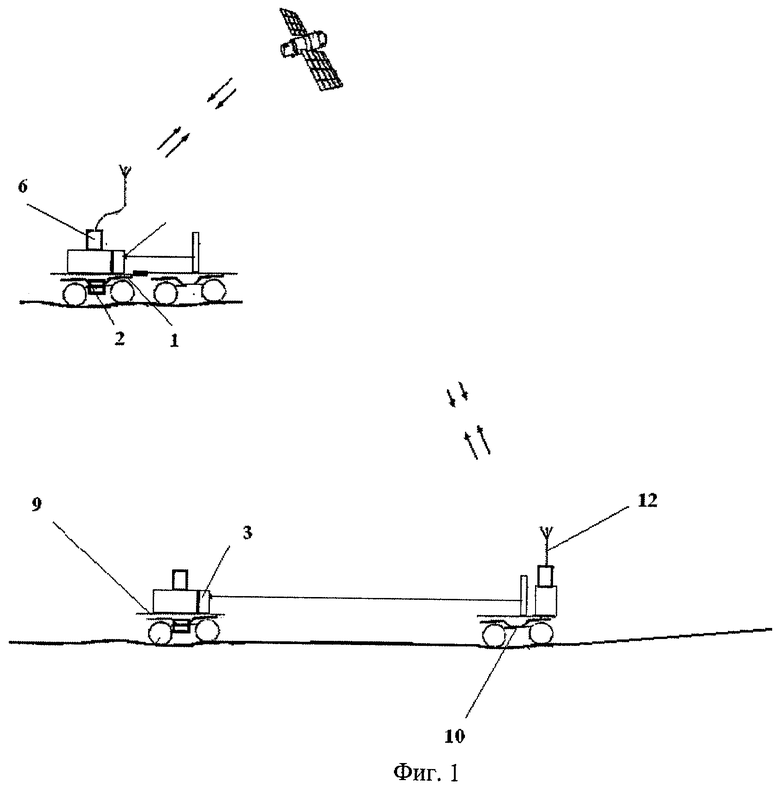
1. Мобильный комплекс для диагностирования железнодорожного пути, состоящий из самоходного транспортного средства, на котором смонтированы измеритель ширины железнодорожного пути и устройство для измерения параметров профиля железнодорожного пути, которые через соответствующие блоки обработки сигналов соединены с микропроцессором, к которому подключено устройство определения координат, отличающийся тем, что он оснащен блоком дистанционного управления, соединенным посредством канала связи с приемником, подключенным к микропроцессору для управления приводом самоходного транспортного средства, которое выполнено составным из двух тележек, причем вторая тележка дополнительно снабжена вертикально установленной линейкой и навигационным приемником, а на первой тележке установлен точечный оптический лазерный прибор, рамы тележек оснащены стыковочными узлами для разъема и соединения тележек, каждый из которых выполнен в виде чашки и штыря, раздельно установленных на соответствующих рамах тележек.
2. Мобильный комплекс по п.1, отличающийся тем, что измеритель ширины железнодорожного пути состоит из двух оптических лазерных приборов, смонтированных под рамой первой тележки над соответствующими головками рельсов.
3. Мобильный комплекс по п.1 или 2, отличающийся тем, что каждый оптический лазерный прибор измерителя ширины железнодорожного пути выполнен матричным.
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| Устройство для охлаждения пека при мокрой грануляции | 1939 |
|
SU74882A1 |
| Вертикально замкнутый литейный конвейер | 1940 |
|
SU62571A1 |
| US 20040095135 A1, 20.05.2004. | |||

