(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАБОЧЕГО МЕСТА И ОЦЕНКИ ПОЗЫ ОПЕРАТОРА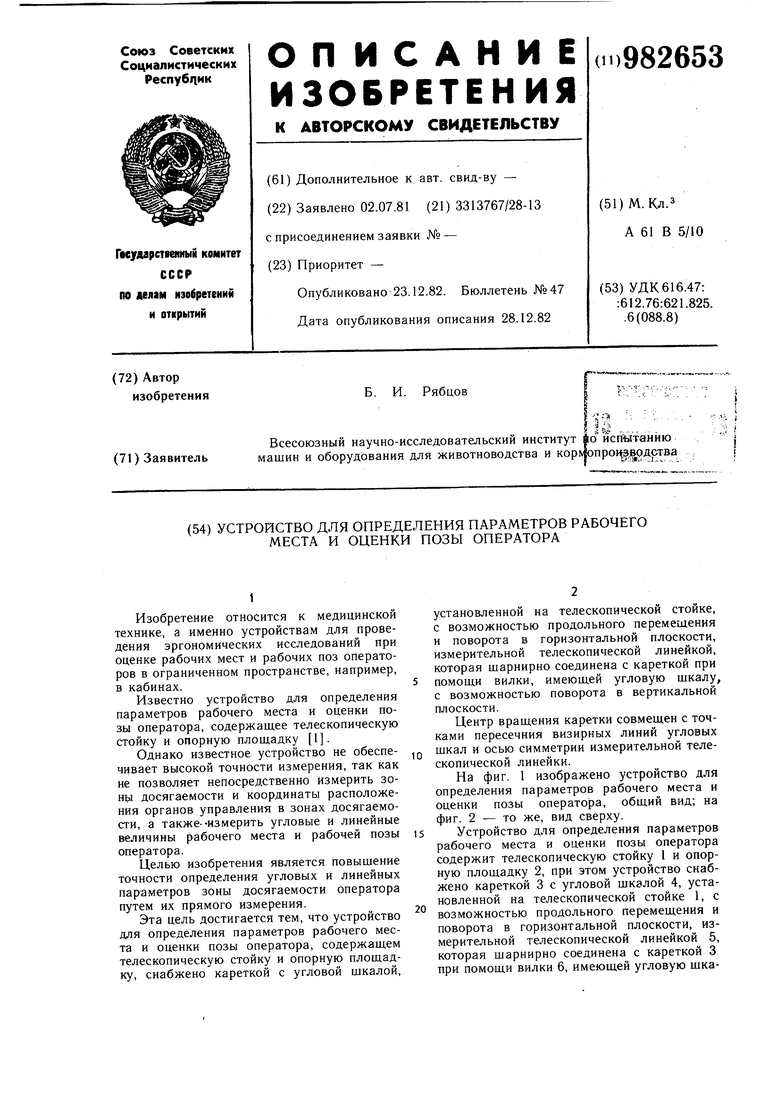

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования эргономических параметров кабин | 1988 |
|
SU1531989A1 |
| Способ оценки расположения органов управления самоходных машин | 1984 |
|
SU1219946A1 |
| Устройство для определения геометрических параметров сиденья транспортного средства | 1983 |
|
SU1129090A1 |
| СИСТЕМА ОРИЕНТИРОВАНИЯ МОБИЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ИЗВЕСТНОМУ ОРИЕНТИРНОМУ НАПРАВЛЕНИЮ | 2024 |
|
RU2838002C1 |
| Устройство для преобразования угловых координат | 1986 |
|
SU1372334A1 |
| Прибор для построения перспективных изображений объекта по двум ортогональным проекциям комплексного чертежа | 1980 |
|
SU977219A1 |
| Устройство для измерения параметров обзорности рабочего места оператора транспортного средства или стационарной установки | 1982 |
|
SU1124192A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ УГЛОВ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1986 |
|
SU1415658A1 |
| Трехмерный посадочный манекен | 1980 |
|
SU957859A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭРГОНОМИЧНОСТИ ОРГАНОВ УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2133019C1 |
1
Изобретение относится к медицинской технике, а именно устройствам для проведения эргономических исследований при оценке рабочих мест и рабочих поз операторов в ограниченном пространстве, например, в кабинах.
Известно устройство для определения параметров рабочего места и оценки позы оператора, содержащее телескопическую стойку и опорную площадку 1.
Однако известное устройство не обеспечивает высокой точности измерения, так как не позволяет непосредственно измерить зонь1 досягаемости и координаты расположения органов управления в зонах досягаемости, а также--измерить угловые и линейные величины рабочего места и рабочей позы оператора.
Целью изобретения является повышение точности определения угловых и линейных параметров зоны досягаемости оператора путем их прямого измерения.
Эта цель достигается тем, что устройство для определения параметров рабочего места и оценки позы оператора, содержащем телескопическую стойку и опорную площадку, снабжено кареткой с угловой шкалой.
установленной на телескопической стойке, с возможностью продольного перемещения и поворота в горизонтальной плоскости, измерительной телескопической линейкой, которая щарнирно соединена с кареткой при 5 помощи вилки, имеющей угловую шкалу, с возможностью поворота в вертикальной плоскости.
Центр вращения каретки совмещен с точками пересечния визирных линий угловых ,Q щкал и осью симметрии измерительной телескопической линейки.
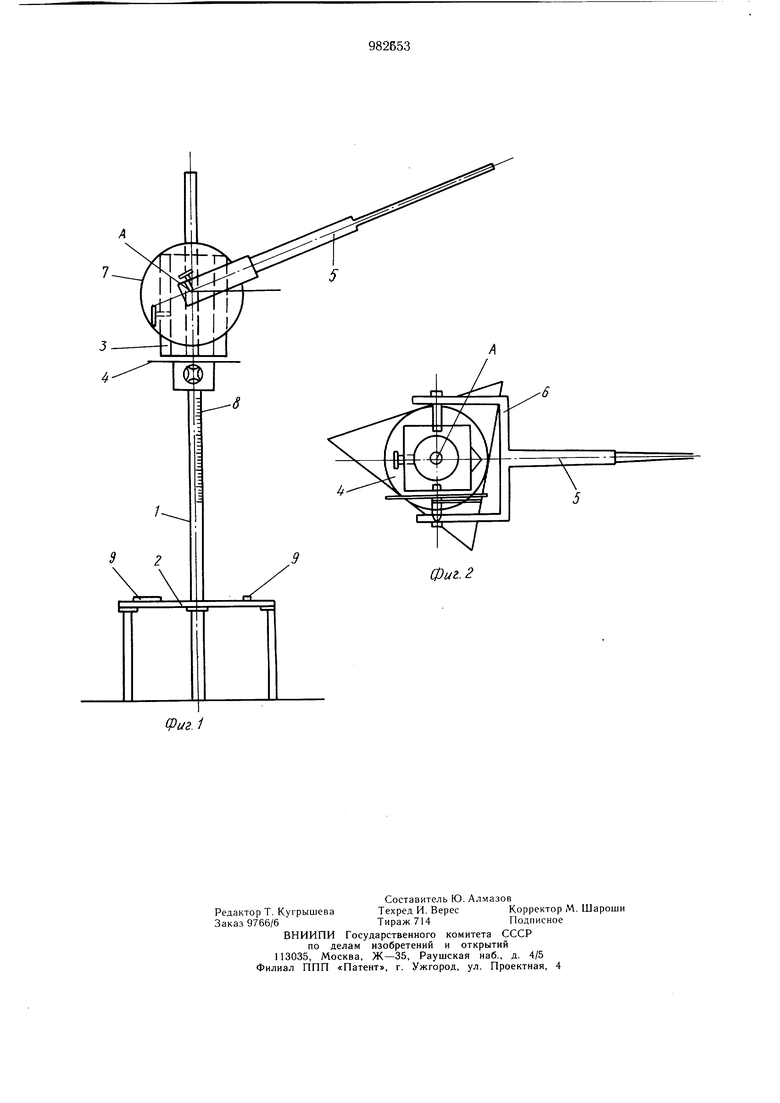
На фиг. 1 изображено устройство для определения параметров рабочего места и оценки позы оператора, общий вид; на фиг. 2 - то же, вид сверху.
Устройство для определения параметров
15 рабочего места и оценки позы оператора содержит телескопическую стойку 1 и опорную площадку 2, при этом устройство снабжено кареткой 3 с угловой шкалой 4, установленной на телескопической стойке 1, с
20 возможностью продольного перемещения и поворота в горизонтальной плоскости, измерительной телескопической линейкой 5, которая щарнирно соединена с кареткой 3 при помощи вилки 6, имеющей угловую щкалу 7, с возможностью поворота в вертикальной плоскости, причем центр А вращения каретки 3 совмещен с точками пересечения визирных линий угловых шкал 4, 7 и осью симметрии измерительной, телескопической линейки 5, а телескопическая стойка 1 снабжена линейной щкалой 8 и на опорной площадке 2 установлены два взаимно перпендикулярных уровня 9.
Устройство работает следующим образом.
Сиденье (не показано) устанавливают в основное положение.. Устройство устанавливают на пол над сиденьем симметрично относительно проекции центра радиусрв зоны расположения органов управления или верщины угла зоны зрительного наблюдения. Для этого измерительную телескопическую линейку 5 опускают по телескопической стойке 1 до совмещения конца линейки 5, выдвинутой на расстояние 450 мм от точки А и усгановки щкалы J на деление 270° и фиксируют ее в этом положении. Каретку
3устанавливают на телескопической стойке 1 при показании деления 180° на шкале
4и фиксируют в этом положении. После выполнения указанных установок производят горизонтирование и юстировку устройства по уровням 9 с перемещением всего устройства так, чтобы осевая линия вертикальной телескопической стойки 1 пересекалась с осью симметрии сиденья, а конец линейки
5совместился с центром зоны расположения органов управления. Затем перемещают каретку 3 на уровень центра радиусов зоны расположениы органов управления и фиксируют ее в этом положении. Описанной подготовкой устройства к измерениям достигают путем совмещения точки А с центром радиусов зоны расположения органов управления и фиксирования ее. Поворачивая линейку 5 в вертикальной плоскости, а каретку 3 в горизонтальной плоскости, производят измерения расстояний из центра радиусов зоны расположения органов управления. Углы отсчитывают по шкалам 4, 7, а расстояние - линейкой 5. При измерении зоны зрительного наблюдения точку А устройства устанавливают на уровень
горизонтальной линии взгляда, -в верщину угла зоны зрительного наблюдения по ГОСТ 12.2.033-78.
Установка устройства при определении зоны безопасности при прочностных испытаниях кабины и угловых параметров рабочей позы аналогична.
Предложенное устройство позволяет повысить точность определения угловых и линейных параметров зоны досягаемости оператора путем их прямого измерения, что характеризует эргономичность рабочего места и рациональность рабочей позы, что весьма важно при оценке качества промыщленной продукции, а именно, для определения оптимального расположения органов управления, что в итоге способствует рационализации рабочей позы и повышению производительности труда оператора.
Формула изобретения
продольного перемещения и поворота в горизонтальной плоскости, измерительной телескопической линейкой, которая шарнирно соединена с кареткой при помощи вилки, имеющей угловую щкалу, с возможностью поворота в вертикальной плоскости.
Источники информации,
принятые во внимание при экспертизе
