Изобретение относится к транспортному машиностроению, в частности к мускульным транснортным средствам.
Целью изобретения является повышение эффективности и равномерности движения.
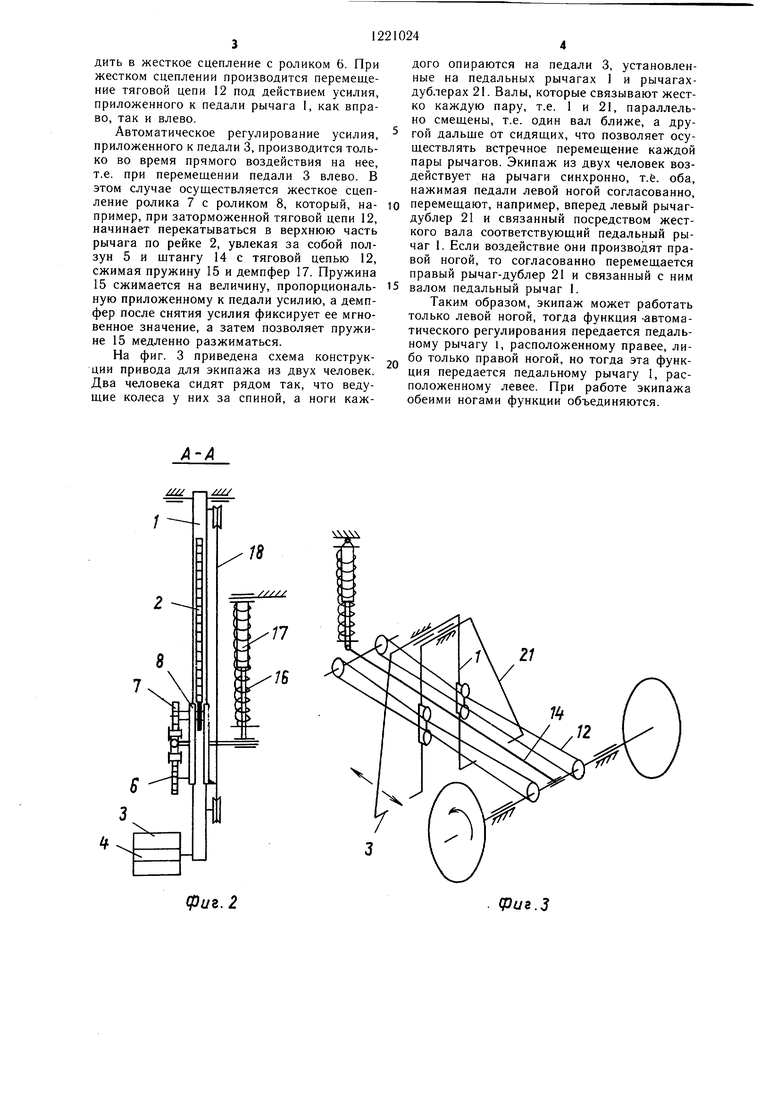
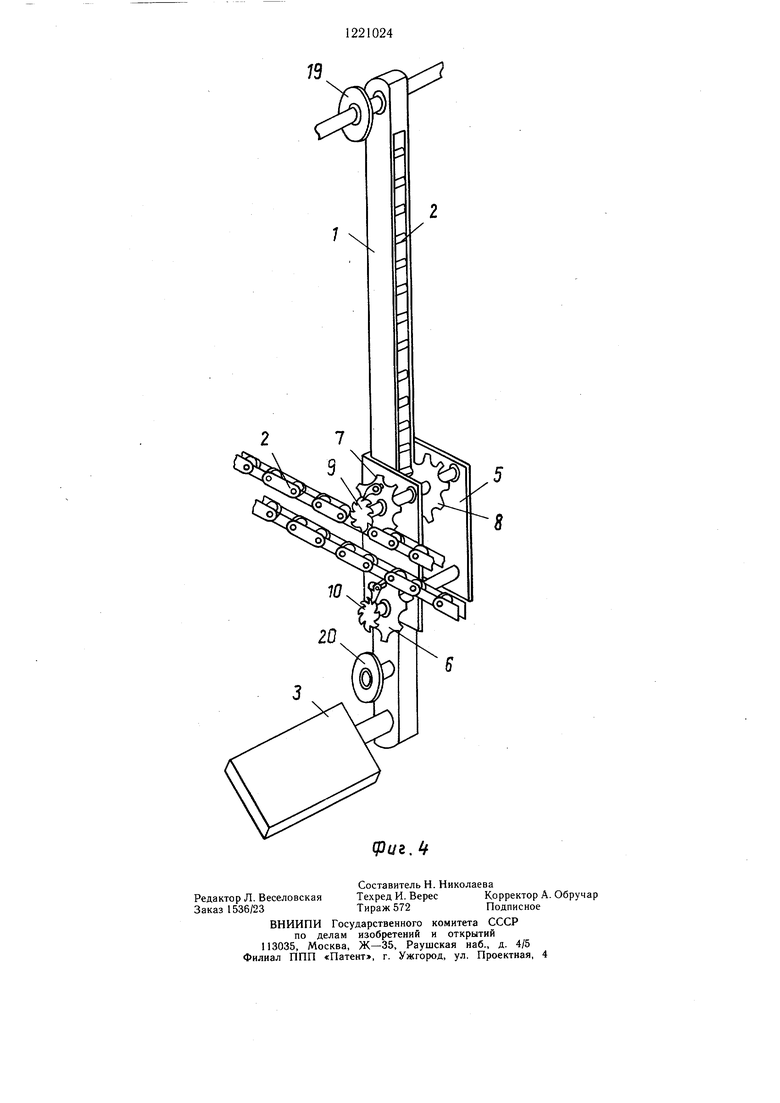
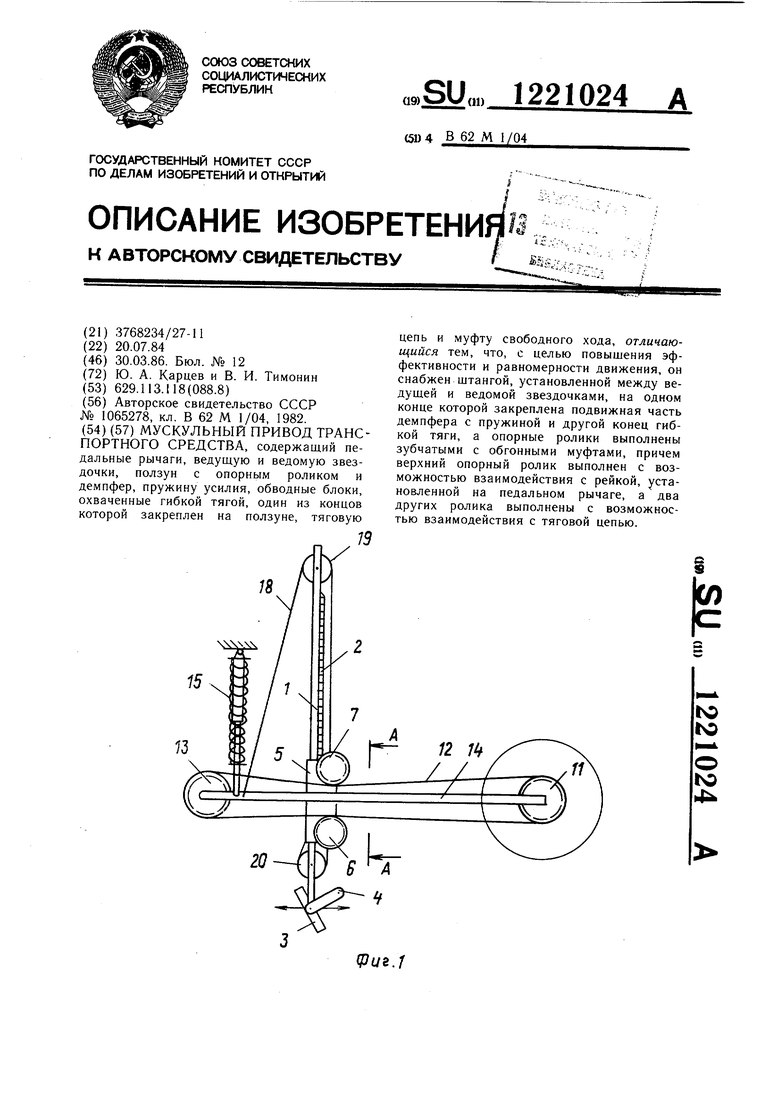
На фиг. 1 представлена кинематическая схема устройства, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - схема компоновки устройства на двухколейном транспортном средстве для экипажа из двух человек; на фиг. 4 - схема компоновки для одноместного привода.
Устройство содержит педальный рычаг 1, состояш,ий из рейки 2 в виде отрезка цепи, педали 3 с туплексо.м 4 и ползуна 5, сос- тояшего из опорных роликов 6-8, причем
10
тем самым сжимая пружину 15 и вводя шток 16 внутрь корпуса демпфера 17, который в этом случае вводится свободно без сопротивления. Величина поднятия ползуна 5 соответствует величине сжатия пружины 15 и пропорциональна приложенному к педали 3 усилию, т.е. зависит от степени сжатия пружины 15 усилия. За счет фиксирующего действия демпфера пружина 15 усилия остается в сжатом состоянии до тех пор, пока в соответствии с постоянной времени работы демпфера 17 в замедленном состоянии ползун 5 и штанга 14 вместе с тяговой цепью 12 не опустятся в исходное состояние. Причем, если при нахождении ползуна 5 в верхней части педального рычага 1 ведуш,ее
опорный ролик 7 содержит зубцы и обгон- 15 колесо растормозить, то за счет запасенной ную муфту 9 (например, в виде храповика), энергии пружины 15 ползун начнет опускать- а на ось которой жестко насажен ролик 8, содержащий зубцы, соединенные с рейкой 2,
ся (при фиксации педального рычага), и ведущее колесо проворачивается. В процессе движения и воздействия на педаль 3
муфту 10. Кроме того, устройство содержит вперед ролик 7 не вращается вследствие ведущее колесо (не показано), на оси кото- действия его обгонной муфты, которая в
ролик 6 также содержит зубцы и обгонную
рого жестко установлена ведущая звездочка 11, тяговую цепь 12, обводящую звездочку 11 и ведомую звездочку 13, установленную на штанге 14, которая с одной стороны соединена щарнирно с осью звездочки 11, а 25 с другой с осью звездочки 13, пружину 15, концы которой жестко установлены на штоке 16 и корпусе демпфера 17, шарнир- но прикрепленного с одной стороны к штанге 14, а с другой к корпусу транспортного средства, гибкую тягу 18, обведенную через 30 ролики 19 и 20, установленные на педальном рычаге 1, один конец гибкой тяги 18 прикреплен к концу штанги 14, а другой к ползуну 5.
Устройство работает следующим образом.
этом направлении стопорит его вращение ввиду жесткого механического сцепления с роликом 8, который, в свою очередь, зубцами соединен с рейкой 2, поэтому происходит перемещение ведущей цепи 12 в сторону, определяющую движение вперед. При воздействии на туплекс 4, т.е. при подтягивании педального рычага в сторону оси ведущего колеса, ролик 7 вращается свободно и перекатывается по цепи 12 навстречу ее движения, а ролик 6, находясь в застопоренном состоянии, ввиду действия своей муфты перемещает ведущую цепь 12 для движения вперед.
Таким образом, за счет изменения положения ползуна 5 на педальном рычаге проВ исходном состоянии, т.е. при отсутствии 35 исходит регулирование прилагаемого усилия воздействия на педаль 3, пружина 15 находится в свободном состоянии и удерживает щток 16 относительно корпуса демпфера 17 в раздвинутом состоянии, что соответствует нижнему положению ползуна 5 и штанги 14 с ве- Q дущей цепью 2.
При приложении к педали 3 усилия ему противодействуют как силы инерции, так и сопротивление транспортного средства, т.е. в начальный момент возникает такая реакция, при которой ведущее колесо как бы затор- 45 можено.
Рассмотрим работу механизма в этом положении. При воздействии усилия на педаль 3 нижняя часть педального рычага 1 отходит от оси ведущего колеса. При этом по застопоренной тяговой цепи 12 посредством
зубцов перекатывается ролик 7 через имеющуюся в нем обгонную муфту 9, увлекая во вращение ролик 8 зубцами, сцепленными с рейкой 2. Ролик 8 при этом подс использованием хода педального рычага 1 вперед и назад и с возможностью остановки его ходов во время движения по инерции.
При движении в гору ползун 5 и штанга 14 с ведущей цепью 12 находятся в верхней части педального рычага 1, а при спуске - в нижней его части, что обеспечивает практически неизменными величины прикладываемых к педали усилий при любой нагрузке.
На фиг. 4 изображен механизм сцепления роликов 6 и 7 с тяговой цепью 12, где обгонная муфта 9 выполнена в виде храпового колеса с фиксатором. Обгонная муфта 9, установленная на ролике 7, позволяет ему свободно прокручиваться при перемещении педали 3 вправо и входить в жеское сцепление с роликом 8 при перемещение педали 3 влево.
Обгонная муфта 10, установленная на
нимается по рейке 2 педального рычага 1, ролике 6, позволяет ему свободно прокруувлекая за собой ползун 5. Прикрепленная одним концом к ползуну 5 гибкая тяга 18 поднимает штангу 14 с тяговой цепью 12,
чиваться при перемещении педали 3 влево, а при движении педали вправо, за счет иного скоса зубцов храпового колеса, вхо
тем самым сжимая пружину 15 и вводя шток 16 внутрь корпуса демпфера 17, который в этом случае вводится свободно без сопротивления. Величина поднятия ползуна 5 соответствует величине сжатия пружины 15 и пропорциональна приложенному к педали 3 усилию, т.е. зависит от степени сжатия пружины 15 усилия. За счет фиксирующего действия демпфера пружина 15 усилия остается в сжатом состоянии до тех пор, пока в соответствии с постоянной времени работы демпфера 17 в замедленном состоянии ползун 5 и штанга 14 вместе с тяговой цепью 12 не опустятся в исходное состояние. Причем, если при нахождении ползуна 5 в верхней части педального рычага 1 ведуш,ее
колесо растормозить, то за счет запасенной энергии пружины 15 ползун начнет опускать-
этом направлении стопорит его вращение ввиду жесткого механического сцепления с роликом 8, который, в свою очередь, зубцами соединен с рейкой 2, поэтому происходит перемещение ведущей цепи 12 в сторону, определяющую движение вперед. При воздействии на туплекс 4, т.е. при подтягивании педального рычага в сторону оси ведущего колеса, ролик 7 вращается свободно и перекатывается по цепи 12 навстречу ее движения, а ролик 6, находясь в застопоренном состоянии, ввиду действия своей муфты перемещает ведущую цепь 12 для движения вперед.
Таким образом, за счет изменения положения ползуна 5 на педальном рычаге происходит регулирование прилагаемого усилия
с использованием хода педального рычага 1 вперед и назад и с возможностью остановки его ходов во время движения по инерции.
При движении в гору ползун 5 и штанга 14 с ведущей цепью 12 находятся в верхней части педального рычага 1, а при спуске - в нижней его части, что обеспечивает практически неизменными величины прикладываемых к педали усилий при любой нагрузке.
На фиг. 4 изображен механизм сцепления роликов 6 и 7 с тяговой цепью 12, где обгонная муфта 9 выполнена в виде храпового колеса с фиксатором. Обгонная муфта 9, установленная на ролике 7, позволяет ему свободно прокручиваться при перемещении педали 3 вправо и входить в жеское сцепление с роликом 8 при перемещение педали 3 влево.
Обгонная муфта 10, установленная на
ролике 6, позволяет ему свободно прокруролике 6, позволяет ему свободно прокручиваться при перемещении педали 3 влево, а при движении педали вправо, за счет иного скоса зубцов храпового колеса, входить в жесткое сцепление с роликом 6. При жестком сцеплении производится перемещение тяговой цепи 12 под действием усилия, приложенного к педали рычага I, как вправо, так и влево.
Автоматическое регулирование усилия, приложенного к педали 3, производится только во время прямого воздействия на нее, т.е. при перемещении педали 3 влево. В этом случае осуществляется жесткое сцепдого опираются на педали 3, установленные на педальных рычагах 1 и рычагах- дублерах 21. Валы, которые связывают жестко каждую пару, т.е. 1 и 21, параллельно смещены, т.е. один вал ближе, а другой дальще от сидящих, что позволяет осуществлять встречное перемещение каждой пары рычагов. Экипаж из двух человек воздействует на рычаги синхронно, т.е. оба, нажимая педали левой ногой согласованно.
ление ролика 7 с роликом 8, который, на-ю перемещают, например, вперед левый рычаг- пример, при заторможенной тяговой цепи 12,дублер 21 и связанный посредством жест- начинает перекатываться в верхнюю частького вала соответствующий педальный ры- рычага по рейке 2, увлекая за собой пол-чаг 1. Если воздействие они производят пра- зун 5 и щтангу 14 с тяговой цепью 12,вой ногой, то согласованно перемещается сжимая пружину 15 и демпфер 17. Пружинаправый рычаг-дублер 21 и связанный с ним 15 сжимается на величину, пропорциональ-15 валом педальный рычаг 1. ную приложенному к педали усилию, а демп-Таким образом, экипаж может работать фер после снятия усилия фиксирует ее мгно-только левой ногой, тогда функция -автома- венное значение, а затем позволяет пружи-тического регулирования передается педаль- не 15 медленно разжиматься.ному рычагу 1, расположенному правее, ли- На фиг. 3 приведена схема конструк-бо только правой ногой, но тогда эта функции привода для экипажа из двух человек. Два человека сидят рядом так, что ведущие колеса у них за спиной, а ноги кажция передается педальному рычагу 1, расположенному левее. При работе экипажа обеими ногами функции объединяются.
дого опираются на педали 3, установленные на педальных рычагах 1 и рычагах- дублерах 21. Валы, которые связывают жестко каждую пару, т.е. 1 и 21, параллельно смещены, т.е. один вал ближе, а другой дальще от сидящих, что позволяет осуществлять встречное перемещение каждой пары рычагов. Экипаж из двух человек воздействует на рычаги синхронно, т.е. оба, нажимая педали левой ногой согласованно.
перемещают, например, вперед левый рычаг- дублер 21 и связанный посредством жест- кого вала соответствующий педальный ры- чаг 1. Если воздействие они производят пра- вой ногой, то согласованно перемещается правый рычаг-дублер 21 и связанный с ним валом педальный рычаг 1. Таким образом, экипаж может работать только левой ногой, тогда функция -автома- тического регулирования передается педаль- ному рычагу 1, расположенному правее, ли- бо только правой ногой, но тогда эта функция передается педальному рычагу 1, расположенному левее. При работе экипажа обеими ногами функции объединяются.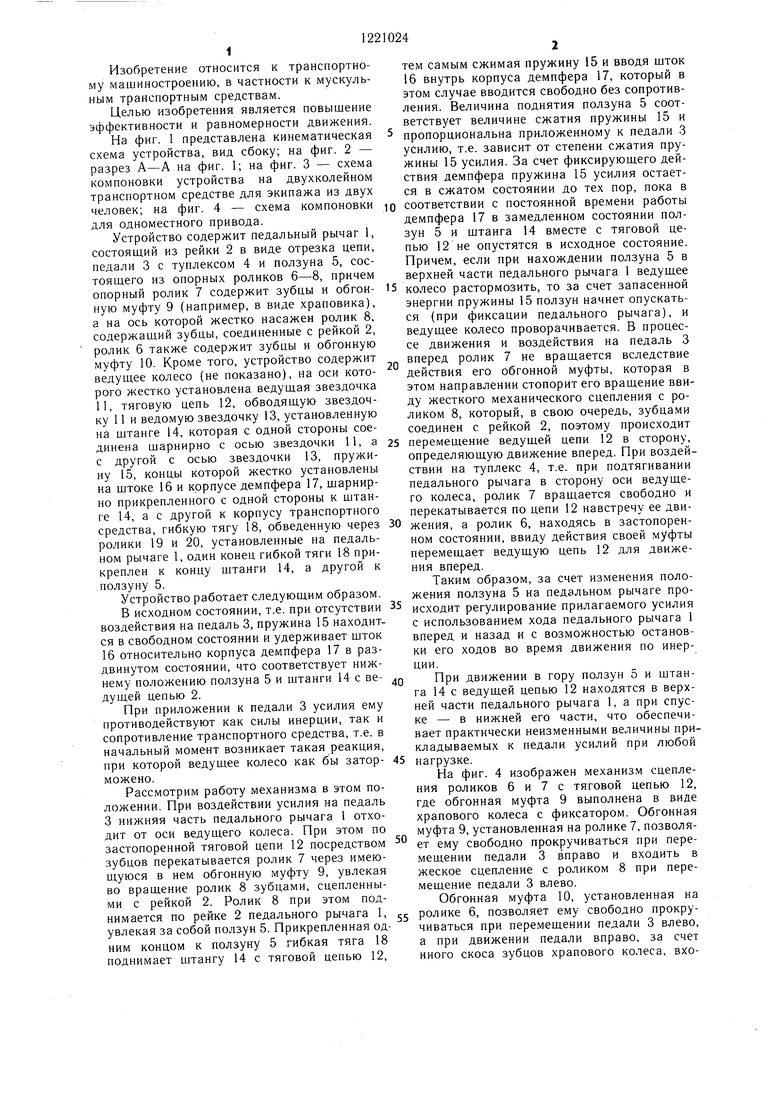
| название | год | авторы | номер документа |
|---|---|---|---|
| Мускульный привод транспортного средства | 1985 |
|
SU1294689A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2131820C1 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| ПРИВОД ПЕДАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2525185C2 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2521469C1 |
| ВЕЛОСИПЕД (ВАРИАНТЫ), КОЛЕСО ВЕЛОСИПЕДА, ПРИВОД ВЕЛОСИПЕДА, РЫЧАЖНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА, ПЕДАЛЬНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА И КОМПЛЕКТ, СОДЕРЖАЩИЙ ВЕЛОСИПЕД И ПРИЦЕП | 2007 |
|
RU2373101C2 |
| ТРАНСПОРТНЫЙ УНИВЕРСАЛЬНЫЙ ВАРИАТОР АВТОМАТИЧЕСКОГО ДЕЙСТВИЯ "ТРАНСУНВАРТОР-АВТОМАТ" | 1992 |
|
RU2047023C1 |
| ВЕЛОСИПЕД | 2011 |
|
RU2463194C1 |
| ПОЛНОПРИВОДНЫЙ ВЕЛОСИПЕД | 1995 |
|
RU2097249C1 |
| Мускульный привод транспортного средства | 1982 |
|
SU1065278A1 |
zii/
/
фиг. 2
фиг.З
с:
Редактор Л. Веселовская Заказ 1536/23
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Фиг,if
Составитель Н. Николаева
Техред И. ВересКорректор А. Обручар
Тираж 572Подписное
| Мускульный привод транспортного средства | 1982 |
|
SU1065278A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
