Изобретение отностся к транспортным средствам, приводимым в действие мускульной силой человека. Известен мускульный привод транспортного средства, содержащий педальные рычаги, каждый из которых посредством гибкой тяги через муфту свободного хода связан с валом ведущего колеса, и возвратную пружину (I. Недостатком известного устройства яв-, ляется невозможность регулирования усилий, прикладываемых к педалям, в зависимости от различных условий движения. Цель изобретения - обеспечение автоматического р ггулирования усилий, прикладываемых к педалям. Указанная цель достигается тем, что в мускульном приводе транспортного средства, содержащем педальные рычаги, каждый из которых посредством гибкой тяги через муфту свободного хода связан с валом ведущего колеса, возвратную пружину, каждый педальный рычаг снабжен ползуном с опорным блоком, дополнительными блоками, установленными в верхней и нижней его частях, и связан посредством гибкой тяги с демпфером. На фиг. 1 представлен предлагаемый мускульный привод транспортного средства; HP фиг. 2 - компоновка двухпедального варианта мускульного привода транспортного средства. Мускульный привод транспортного средства состоит из педального рычага I, педали 2, двух ветвей гибкой тяги, первая из которых 3 одним концом закреплена в точке А ползуна 4, а другим соединена с возвратной пружиной 5 и проходит через верхНИИ блок 6, опорный блок 7, муфту свободного хода 8, установленную на оси 9 ведущего колеса 10 велосипеда. Вторая ветвь II гибкой тяги одним концом закреплена также в точке А ползуна 4, а другим соединена с пружиной усилия 12 и штоком 13 демпфера одностороннего действия и проходит через нижний 14 и верхний 6 блоки. Ось качания 15 педального рычага I находится на уровне верхней образующей окружности верхнего блока 6. Пружина усилия 12 и возвратная пружина 5 прикреплены к корпусу транспортного средства, к которому также крепится и корпус f6 демпфера одностороннего действия. Устройство работает следующим образом. В исходном состоянии, т.е. при отсутствии воздействия на педаль 2, сжатая пружина усилия 12 удерживает штЬк 13 демпфера внутри корпуса 16, что соответствует нижнему положению ползуна 4 опорного блока 7 на педальном рычаге 1. При приложении к педали 2 некоторого усилия этому усилию противодействуют как силы инерции, так и сопротивления движению транспортного средства, т.е. в начальный момент возникает такое положение, при котором ведущее колесо как бы заторможено. Рассмотрим работу механизма в этом положении. При воздействии на педаль 2 педальный рычаг I отходит от муфты свободного хода 8, а первая ветвь гибкой тяги 3, прикрепленная к ползуну 4 через верхний обводной блок 6 и опорный блок 7, удлиняясь, поднимает ползун 4, причем величина этого перемещения составляет поло- вину от величины удлинения первой ветви гибкой тяги 3. Одновременно посредством второй ветви II гибкой тяги, прикрепленной к ползуну 4 и проходящей через блоки 6 и 14, растягивается пружина усилия 12 и выдвигается из корпуса 16 щток 13 демпфера одностороннего действия. Величина поднятия ползуна 4 пропорциональна приложенному к педали. 2 усилию, т.е. зависит от степени растяжения пружины усилия 12. Таким образом, регулирование прилагаемого усилия происходит за счет изменения положения ползуна 4 на педальном рычаге I при изменении величины сопротивления качению колес транспортного средства. Если теперь ведущее колесо 10 растормозить, то за счет запасенной потенциальной энергии пружины усилия 12, соединенной со второй ветвью 11 гибкой тяги, ползун начинает опускаться (при фиксации педального рычага 1), и ведущее колесо 10 поворачнвается. Однако скорость опускания ползуна 4 замедлена демпфером, который препятствует быстрому сжатию пружины усилия 12. Скорость опускания ползуна 4 после прекращения воздействия на педаль 2 характеризуется постоянной времени демпфера и степенью сжатия пружины усилия 12. При движении велосипеда на подъем ползун 4 с опорным блоком 7 находится в верхней части педального рычага I, а при спуске - в нижней его части. Таким образом, величины прикладываемых к педалям усилий в результате автоматического х регулирования остаются практически незменкыми при любой нагрузке.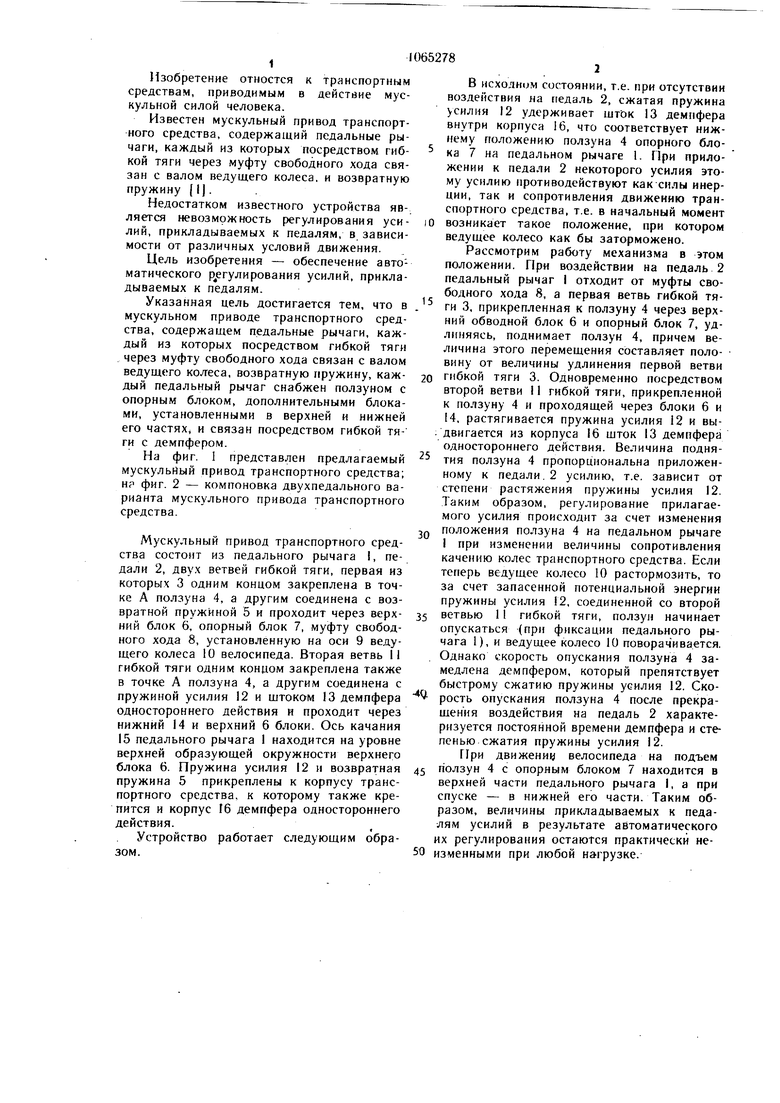
| название | год | авторы | номер документа |
|---|---|---|---|
| Мускульный привод транспортного средства | 1984 |
|
SU1194757A2 |
| Мускульный привод транспортного средства | 1983 |
|
SU1177198A2 |
| РОЛЛЕР | 1991 |
|
RU2016807C1 |
| ВЕЛОСИПЕД | 1992 |
|
RU2041114C1 |
| ПРИВОД ПЕДАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2525185C2 |
| Мускульный привод транспортного средства | 1984 |
|
SU1221024A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2247676C2 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2521469C1 |
| Мускульный привод транспортного средства | 1987 |
|
SU1477619A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
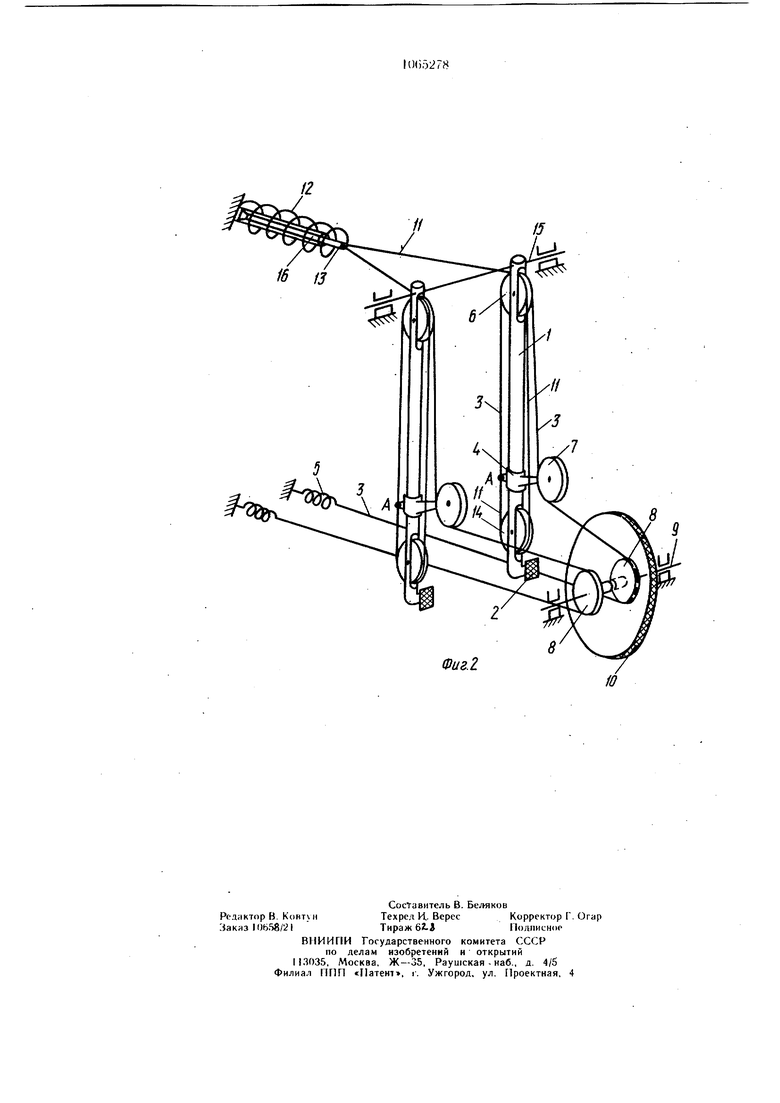
МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА, содержащий. педальные рычаги, каждый из которых посредством гибкой тяги через муфту свободного хода связан с валом ведущего колеса, возвратную пружину, отличающийся тем, что, с целью обеспечения автоматического регулирования усилий, прикладываемых к педалям, каждый педальный рычаг снабжен ползуном с опорным блоком, дополнительными блоками, установленными в верхней и нижней его частях, и связан посредством гибкой тяги с демпфером. (Л С35 ел to 41 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3884501, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
