122
2,Устройство по П.1 о т л и - чающееся тем, что блок коррекции величины требуемого зиачения натяжения нитей состоит из последовательно соединенных датчика числа оборотов измерительного валика, счетчика, цифроаналогового преобразователя и усилителя, сумматора и задатчика натяжения нитей, а датчик числа оборотов измерительного валика является входом блока коррекции, при зтом выходы усилителя и задатчика натяжения нитей через сумматор подключены-к выходу блока коррекции.
3.Устройство поп.1,отли- чающе е с я тем, что блок управления состоит из компаратора, мультиплексора, релейного элемента, ши- ротно-импульсного модулятора, счетчика, последовательно соединенных цифроаналогового преобразователя и усилителя мощности, индикатора знака регулирования и последовательно соедиИзобретение относится к текстиль- ной промышленности, в частности, уст ройствам для регулирования натяжения нитей на сновальной машине.
Цель изобретения - повьш1ение точности регулирования.
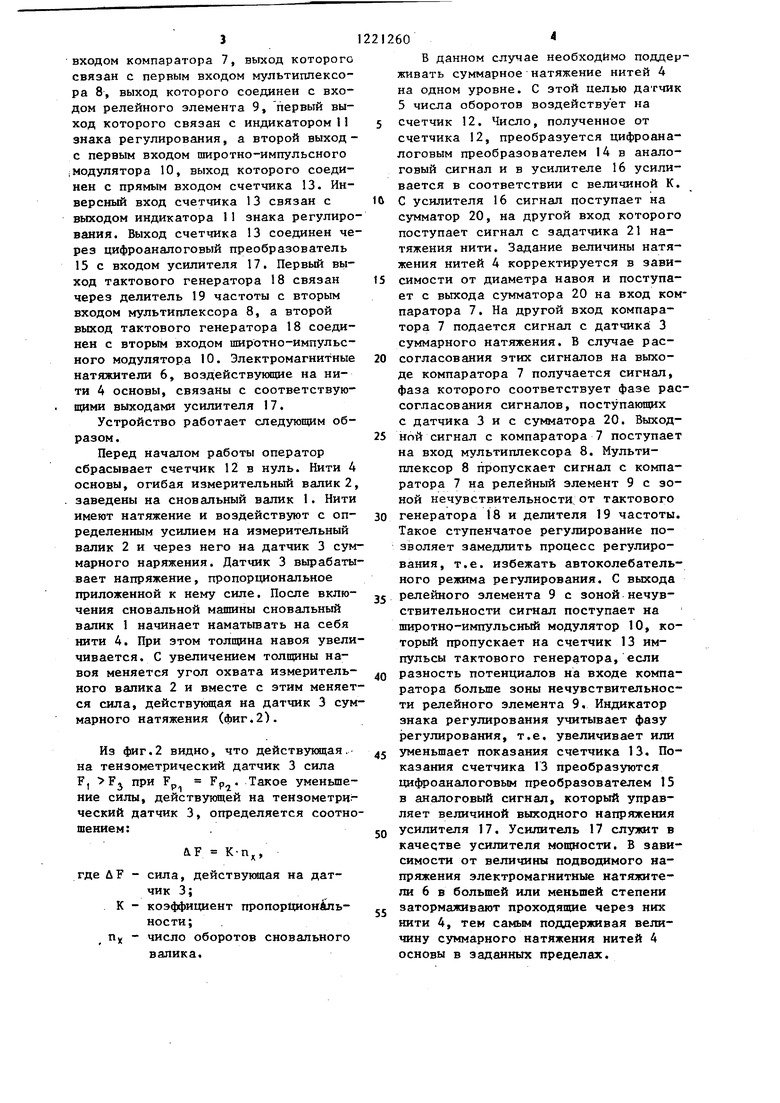
На фиг.1 изображена структурная схема устройства; на фиг.2 - зависимость силы, действующей на датчик суммарного натяжения, в зависимости от диаметра навоя.
Устройство состоит из сновальногс валика I, измерительного валика 2, кинематически связанного с датчиком 3 cytiMapHoro натяжения нитей 4, датчика 5 числа оборотов, кинематически связанного с измерительным валиком 2, электромагнитных натяжителей 6, компаратора 7, мультиплексора 8, релейного элемента 9 (с зоной нечувствительности) , широтно-импульсного модулятора 10, индикатора 11 знака регулирования, первого 12 и второго 13 счетчиков, первого 14 и второго 15 цифроаналоговых преобразователей, первого 16 и второго 17 усилителей, .тактового генератора 18, делителя 19
260
ненных тактового генератора и делителя частоты, при этом входы компаратора являются входами блока управления, а выход.компаратора подключен к первому входу мультиплексора, вторым входом связанного с выходом делителя частоты, а выходом - с входом релейного элемента, выходы которого подключены соответственно к первому входу широтно-импульсного модулятора и к входу индикатора знака регулирования, а выходы широтно-импульсного модулятора и индикатора знака регулирования соответственно через прямой и инверсный входы счетчика блока управления связаны с входом цифроаналогового преобразователя блока управления, причем выход усилителя мощности соединен с входом исполнительного механизма изменения натяжения нитей, а вьЬсод тактового генератора связан с вторым входом широтно-импульсного модулятора.
частоты, сумматора 20 и задатчика 21 натяжения нитей.
Датчик 5 числа оборотов измерительного валика 2, счетчик 12, цифро5 аналоговый преобразователь 14, усилитель 16, сумматор 20 и задатчик 21 натяжения нитей образуют блок коррекции величины требуемого значения натяжения нитей.
0 Блок управления состоит из компаратора 7, мультиплексора 8, релейного элемента 9, широтно-импульсного модулятора 10, счетчика 13, цифроаналогового преобразователя 15, усилите5 ля 17, индикатора 11 знака регулирования, тактового генератора 18 и делителя 19 частоты.
Электрический выход датчика 5 числа оборотов через счетчик 12, цифро- 0 аналоговый преобразователь 14 и усилитель 16 Связан с первым входом сумматора 20, к второму входу которого подключен задатчик 21 натяжения нити, а выход сумматора 20 связан с
первым входом компаратора 7. Электрический выход датчика 3 суммарного натяжения нитей соединен с вторым
3
входом компаратора 7, выход которого связан с первым входом мультиплексора 8, выход которого соединен с входом релейного элемента 9, первый выход которого связан с индикатором 11 знака регулирования, а второй выход- с первым входом широтно-импульсного jмодулятора 10, выход которого соединен с прямым входом счетчика 13. Инверсный вход счетчика 13 связан с выходом индикатора 11 знака регулирования. Выход счетчика 13 соединен через цифроаналоговый преобразователь 15 с входом усилителя 17. Первый выход тактового генератора 18 связан через делитель 19 частоты с вторым входом мультиплексора 8, а второй выход тактового генератора 18 соединен с вторым входом широтно-импульсного модулятора 10. Электромагнитные натяжители 6, воздействующие на нити 4 основы, связаны с соответствующими выходами усилителя 17.
Устройство работает следующим образом.
Перед началом работы оператор сбрасывает счетчик 12 в нуль. Нити 4 основы, огибая измерительный валик 2, заведены на сновальный валик 1. Нити имеют натяжение и воздействуют с оп- ределенным усилием на измерительный валик 2 и через него на датчик 3 суммарного наряжения. Датчик 3 вырабатывает напряжение, пропорциональное приложенной к нему силе. После вклю- чения сновальной машины сновальный валик 1 начинает наматьшать на себя нити 4. При этом толщина навоя увеличивается. С увеличением толщины навоя меняется угол охвата измеритель- ноге валика 2 и вместе с этим меняется сила, действующая на датчик 3 суммарного натяжения (фиг.2).
Из фиг. 2 видно, что действукяцая , на тензометрический датчик 3 сила F, Fj при FP Fp. Такое уменьшение силы, действующей на тензометри-- ческий датчик 3, определяется соотношением:
ЛР К-п,,
сила, действунмцая на датчик 3; коэффициент пропорЦион пьности;
число оборотов сновального валика.
5 0
5
о -
260
В данном случае необходимо поддерживать суммарное натяжение нитей 4 на одном уровне. С этой целью датчик 5 числа оборотов воздействует на счетчик 12. Число, полученное от счетчика 12, преобразуется цифроана- логовым преобразователем 14 в аналоговый сигнал и в усилителе 16 усиливается в соответствии с величиной К. С усилителя 16 сигнал поступает на сумматор 20, на другой вход которого поступает сигнал с задатчика 21 натяжения нити. Задание величины натяжения нитей 4 корректируется в зависимости от диаметра навоя и поступает с выхода сумматора 20 на вход компаратора 7. На другой вход компаратора 7 подается сигнал с датчика: 3 суммарного натяжения. В случае рассогласования этих сигналов на выходе компаратора 7 получается сигнал, фаза которого соответствует фазе рассогласования сигналов, поступающих с датчика 3 и с сумматора 20. Выходной сигнал с компаратора 7 поступает на вход мультиплексора 8. Мультиплексор 8 пропускает сигнал с компаратора 7 на релейный элемент 9 с зоной нечувствительности от тактового генератора 18 и делителя 19 частоты. Такое ступенчатое регулирование позволяет замедлить процесс регулирования, т.е. избежать автоколебательного режима регулирования. С выхода релейного элемента 9 с зоной нечувствительности сигнал поступает на широтно-импульсный модулятор 10, который пропускает на счетчик 13 импульсы тактового генератора, если разность потенциалов на входе компаратора больше зоны нечувствительности релейного элемента 9. Индикатор знака регулирования учитывает фазу регулирования, т.е. увеличивает или уменьшает показания счетчика 13. Показания счетчика 13 преобразуются цифроаналоговым преобразователем 15 в аналоговый сигнал, который управляет величиной выходного напряжения усилителя 17. Усилитель 17 служит в качестве усилителя мощности. В зависимости от величины подводимого напряжения электромагнитные натяжители 6 в большей или меньшей степени затормаживают проходящие через них нити 4, тем самым поддерживая величину суммарного натяжения нитей 4 основы в заданных пределах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения нитей на сновальной машине | 1986 |
|
SU1375697A1 |
| Цифровой регулятор температуры | 1986 |
|
SU1352470A1 |
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
| Способ управления разматыванием основных нитей с группы сновальных валиков | 1982 |
|
SU1074919A1 |
| ПОЛИМАГНИТНЫЙ ТЕРАПЕВТИЧЕСКИЙ АППАРАТ | 1992 |
|
RU2007198C1 |
| Способ широтно-импульсного преобразования напряжения и широтно-импульсный модулятор | 1986 |
|
SU1361709A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366998C2 |
| Устройство управления | 1984 |
|
SU1229721A1 |
| Устройство для индикации однократных сигналов | 1984 |
|
SU1275519A1 |
| Устройство для цифровой индикации многоканального регулятора температуры | 1983 |
|
SU1211709A1 |

| Патент ФРГ 3128538, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
