Изобретение относится к текстильной промышленности.
Цель изобретения - повышение точности регулирования путем коррекции управляющего воздействия в зависимости от изменения радиуса сноваль- ного валика.
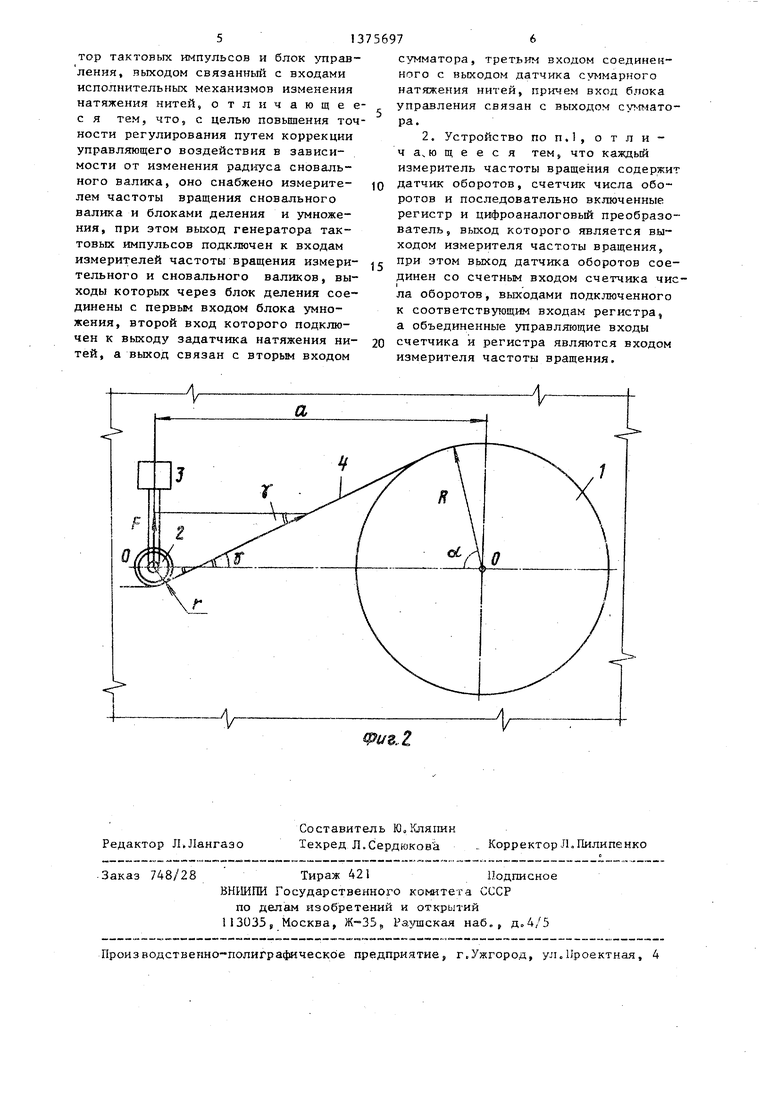
На фиг.1 показана блок-схема предлагаемого устройства; на фиг.2 - упрощенная схема прохождения нитей от измерительного валика к сновальному .
Устройство состоит из сновального валика I и измерительного валика 2, кинематически связанного с датчиком 3 суммарного натяжения нитей 4
Измеритель частоты вращения измерительного валика 2 состоит из последовательно соединенных датчика 5 числа оборотов валика 2, счетчика 6, регистра 7 и цифроаналогово- го преобразователя 8. Датчик 5 кинематически связан с осью вращения валика 2.
Измеритель частоты вращения сновального валика 1 состоит из последовательно соединенных датчика 9 числа оборотов валика 1, счетчика 10, регистра 11, цифроаналогового преобразователя 12. Датчик 9 кинематически связан с осью вращения валика 1 .
Устройство включает генератор 13 тактовых импульсов, блок 14 деления, блок 15 умножения, сумматор 16 задатчик I7 натяжения нитей и масштабирующий усилитель 18. При этом выход датчика 3 подключен к счетному входу счетчика 6, выходы которого соединены с соответствующими входами регистра 7. Выходы регистра 7 соединены с входами цифроаналогового преобразователя 8. Датчик 9 числа оборотов сновального валика I выходом подключен к счетному входу счетчика 10. Выходы последнего подключены к соответствующим входам регистра 11, выходы которого соединены, с входами цифроаналогового преобразователя 12,
Первый вход блока 14 деления подключен к выходу цифроаналогового преобразователя 8, а второй вход блока 14 подключен к выходу цифро- аналогового преобразователя 12. Выход генератора 13 тактовых импульсов подключен к входам счетчика 6, регистра 7, счетчика 10 и регистра 1 1 . Выход блока 14 подключен к первому входу блока 15 умножения. Выход задатчика 17 соединен с вхоДОМ масщтабирующего усилителя 18. Выход усилителя 18 подключен к второму входу блока 15 и входу сумматора 16, другой вход которого соединен с выходом блока 15, а третийс выходом датчика 3 суммарного натяжения нитей.
Входы интегратора 19 и регулирующего усилителя 20 объединены и подключены к выходу сумматора 16.
Выход интегратора 19 подключен к первому входу сумматора 21. Выход регулирующего усилителя 20 подключен к второму входу сумматора 21, выход которого соединен с входом
усилителя 22 управляющего сигнала натяжения нитей« Выходы усилителя 22 подключены к исполнительным механизмам (электромагнитным натяжителям 23), изменяющим натяжение нитей 4. Интегратор 19, усилитель 20, сумматор 21 и усилитель 22 образуют блок управления.
Устройство работает следующим образом.
Составляющая силы натяжения (фиг.2), действующая на датчик 3, изменяется по закону
35
F Т .Sin 9
(1)
где 41 - угол между направлением
движения нитей 4 и линий, соединяющих центры сновального 1 и. измерительного 2 валиков
л Y - ы ,
(2)
где с/. - угол между осью 0-0, соединяющей центры валиков I, 2 и направлением от центра сновального валика I к точке касания его нитями 4. Очевидно, что
r-t- ft
01 arc.COS () (3)
а
где г и R радиусы, соответственно измерительного 1 и сновального 2 валиков; расстояние между центрами валиков.
г + R . arc cos --)
+ Т --- -- UJ a u).
X---- + Т --- , (4) a a n,,,
Д с.М
Чи и см соответственно угловые скорости и числа оборотов за определенный временный интервал измерительного и сновального валиков.
Сигнал рассогласования, поступающий на вход блока управления (интегратора 19 и регулирующего усилителя 20), определяется как
n
MiM, ЧСс
/ -J)
uF F - Т , --(1+
изм зчЭ аn
n
г ,, изм. часть вычитаемого Т,аЭ (,
г м именно(1+ ), позволяет а n
си
откорректировать задание натяжения учетом изменяющегося радиуса R сновального валика.
Формирование сигнала рассогласо- ванияUF производится в сумматоре 16 на один вход которого подается сигнал F. (т.е. измеряемое натяжение) с датчика 3 натяжения.
На выходах датчиков 5 и 9 формируются импульсные электрические сигналы, частота которых пропорциональна частоте вращения соответственно измерительного 2 и сновального 1 валиков. Импульсные сигналы подаются на входы счетчиков 6 и 10, на- растающий код в которых в каждый момент времени соответствует числу импульсов, пришедших за цикл контроля от датчиков 5 и 9.
Дпительность цикла контроля оп- ределяется периодом повторения из- мерительньк импульсов, которые с выхода генератора 13 поступают на входы счетчиков 6 и 10 и регистров 7 и И. Передний фронт каждого импуль- са окончания цикла переписьшает накопленный в счетчиках 6 и i О код числа импульсов п и п, э поступивших от измерительного 2 и сновального 1 валиков соответственно в ре- гистры 7 и 11. Задний фронт импульса окончания цикла обнуляет счетчики 6 и 10, обеспечивая возможность счета в следующем цикле измерения. Коды
n и 1 преобразуются в пропорциональные аналоговые сигналы в цифроаналоговых преобразователях 8 (для п и 12 (для п). Аналоговые сигналы поступают на входы блока 14 деления, на выходе которого
формируется сигнал .
Задатчик 17 формирует аналого- . вый сигнал, пропорциональный требуемому натяжению Т . Масштабирующий усилитель 18 формирует на выходе
сигнал Т ч , который в качестве
второго слагаемого в выражении (5) подается на вход сумматора 16.
. Для формирования третьего слагаемого в выражении (5) сигнал г
Т
а
умножается на величину
3 блоке 15 умножения. Сигнал с вьпсода 15 подается на вход сумматора 16. На выходе сумматора 16 формируется сигнал рассогласова- ния в соответствии с выражением (5). Сигнал рассогласования а F поступает на входы интегратора 19 и регулирующего усилителя 20, которые вместе реализуют ПИ закон регулирования. Инерционность, вносимая в процесс регулирования интегратором 19, позволяет избежать автоколебательного режима. Результирующее регулирующее воздействие формируется в результате суммирования пропорциональной и интегральной составляющих в сумматоре 21, Регулирующее воздействие отрабатьшает усилитель 22, который воздействует на исполнительные механизмы - электромагнитные натяжители 23, изменяющие фактическое натяжение нитей 4.
Формула изобретения
1.Устройство для регулирования натяжения нитей на сновальной машине, содержащее измерительный валик, установленный с возможностью вращения и кинематически связанный с датчиком суммарного натяжения нитей, задатчик натяжения нитей, выходом подключенный к первому входу сумматора, измеритель частоты вращения измерительного вал1ша, генера
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения нитей на сновальной машине | 1984 |
|
SU1221260A1 |
| Устройство для регулирования вытяжки основы на шлихтовальной машине | 1983 |
|
SU1100338A1 |
| Способ управления разматыванием основных нитей с группы сновальных валиков | 1982 |
|
SU1074919A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ СНОВАЛЬНЫХ ВАЛОВ | 2011 |
|
RU2493088C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ СНОВАЛЬНЫХ ВАЛОВ | 2010 |
|
RU2439218C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ЛЕНТОЧНОГО МАТЕРИАЛА | 2016 |
|
RU2626735C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ СНОВАЛЬНЫХ ВАЛОВ | 2012 |
|
RU2525798C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ СНОВАЛЬНЫХ ВАЛОВ | 2012 |
|
RU2499758C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ДЛИННОМЕРНЫХ МАТЕРИАЛОВ В РУЛОН | 2006 |
|
RU2329939C2 |
| Устройство для измерения плотности и отмеривания заданной длины намотки длинномерных материалов | 1981 |
|
SU998276A1 |