Изобретение относится к машиностроению и может быть использовано в механической обработке для автоматической передачи деталей.
Цель . изобретения - повышение на;1ежности работы механизма при повы шен ных скоростях вращения винта.
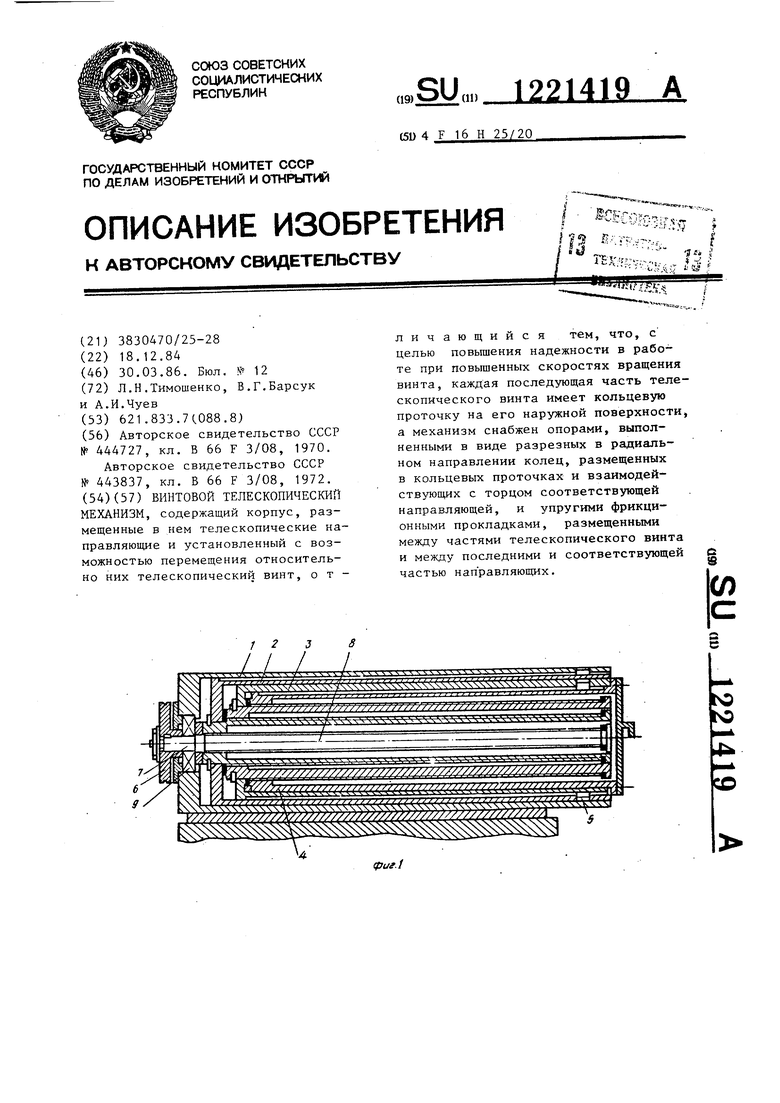
На фиг. 1 изображен винтовой телескопический механизм, общий вид/ на фиг. 2 - то же, в выдвинутом крайнем положении, общий вид; на фиг. 3 - узел 1 сопряжения частей винтового телескопического механизма друг с другом в направляющей.
Винтовой телескопический механизм (фиг. 1 и 2) состоит из корпуса 1, внутри которого расположёны телескопические цилиндрические направляющие 2, 3 и 4, фиксируе- Nfcie от осевого поворота продольными шпонками 5, и приводного от шкива 6 телескопического винта 7, состоящего из винта 8, опирающегося на подшипник 9, и полых винтов 10 и 11 опирающихся на направляющие 2 и 3. Полые винты 10 и 11 снабжены внутренними гайками, по которым они -сопрягаются между собой и с винтом 8 В радиальном направлении полые винты 10 и 11 (фиг. 3) сопрягаются с цилиндрической шейкой с направляющими 2 и 3, а в осевом направлении - упругими фрикционными прокладками 12 и 13 с одной сторон и разными в радиальном направлении кольцами 14 и 15, закрепленными на торцах направляющих 2 и 3 и производящими их взаимную фиксацию в осевом направлении, с другой стороны. Сопряжение в осевом направлении полых винтов 10 и 11 между собой с направляющей 4, винтом 8 и шайбой 16, закрывающей подшипник 9, осуществляется упругими фрикционны ми прокладками 17 - 20.
Винтовой телескопический механизм работает следующим образом.
В исходном положении (фиг. 1) вращение от привода передается через шкив 6 и винт 8, по резьбе которого начинает перемещаться соединенный с направляющей 2 кольцом 14 полый винт 10 до сцепления с винтом 8 через упругую фрикционную прокладку 19. После этого начинается совместное вращение винтов 8 и 10, при
21419
котором по резьбе последнего, опирающегося на направляющую 2, начи- на.ет перемещаться соединенный с направляющей 3 кольцом 15 полый винт 5 11 до сцепления с полым винтом 10 через упругую фрикционную прокладку 17, после чего начинается совместное вращение винтов 8, 10 и 11, при котором по резьбе последнего, 10 опирающегося на направляющую 3, начинает перемещаться направляющая 4 до сцепления с полым винтом 11 через упругую фрикционную проклад15
ку 18.
При вращении привода в обратную сторону происходит сцепление полого винта 10 с винтом 8, по резьбе которого начинает перемещаться соединенный с направляющей 2 полый винт 10 до сцепления с винтом 8 на упругом кольце через шайбу 16 и упругую фрикционную прокладку 20, после чего начинается совместное вращение спаренных винтов 8 и 10 и происходит расцепление полых винтов 11 и 10, при котором по резьбе последнего, опирающегося на направляющ то 2, начинает перемещаться соединенный
с направляющей 3 полый винт 11 до сцепления с направляющей 2 через упругую фрикционную прокладку 12, после чего начинается совместное вращение спаренных винтов 8, 10 и
11 и происходит расцепление направляющей 4 и полого винта 11, при ко- тором по резьбе последнего, опираю- щегося на направляющую 3, начинает перемещаться направляющая 4 до упора в направляющую 3 через упругую фрикционную прокладку 13. В момент сцепления винтов друг с другом или с направляющими через упругие фрикционные прокладки по поверхности контакта последних винтами скручивают упругую фрикционную прокладку, которая накапливает крутящий момент, противоположный моменту врещения винта, препятствуя тем самым заклиниванию винтов. В момент расцепления винтов друг с другом и с направляющими при изменении направления вращения скрученные упругие фрикционные прокладки, воздействуя на винты
накопленным крутящим моментом сов- 1 местно с рабочим крутящим моментом, облегчают расцепление винтов и прерывают возможность нарастающего
J12214194
увеличения . момента на расцепление щей пределы упругости материалов и . винтов, который в противном случае вызывающей схватывание поверхностей может достигнуть величины, превышаю- контакта винтов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой телескопический механизм | 1989 |
|
SU1679096A1 |
| КОЛОНКОВОЕ СВЕРЛО | 1950 |
|
SU97629A1 |
| ПРИВОД | 2000 |
|
RU2265764C2 |
| СПОСОБ КОМБИНИРОВАННОГО НАКОПЛЕНИЯ ЭНЕРГИИ | 2021 |
|
RU2771214C1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2104606C1 |
| ДВОЙНАЯ ФРИКЦИОННАЯ МУФТА СЦЕПЛЕНИЯ | 2019 |
|
RU2708963C1 |
| ФРИКЦИОННАЯ МУФТА И УСТРОЙСТВО СЦЕПЛЕНИЯ | 1992 |
|
RU2238451C2 |
| Регулятор зазора между тормозной колодкой и колесом железнодорожного транспортного средства | 1981 |
|
SU1153820A3 |
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 2002 |
|
RU2289045C2 |
| УСТРОЙСТВО ДЛЯ ВЫКЛЮЧЕНИЯ ДВИЖУЩЕГО МЕХАНИЗМА ПАРОВОЗНОЙ МАШИНЫ ПРИ ЕЗДЕ ПАРОВОЗА БЕЗ ПАРА | 1934 |
|
SU45941A1 |
/ Г4
tpusZ
14
ю
Составитель Р.Ожина редактор А.Ревин Техред О.Гортвай Корректор С,Черни
Заказ 1567/43 Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал 1ШП Патент, г. Ужгород, ул. Проектная, 4
раг.Ъ
| Винтовой телескопический домкрат | 1973 |
|
SU444727A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Телескопический подъемник | 1972 |
|
SU443837A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
