Изобретение относится к машиностроению, в частности к электроприводам.
Известны приводы с противоположно вращающимися роторами, которые чаще всего применяются для вращения сдвоенных гребных судовых винтов. К таким приводам относится контрроторный каскад с синхронным генератором (Парфенов Э.Е., Алексеев С.А. Исследования бесконтактного контрроторного каскада с синхронным генератором. - Известия АН СССР. Энергетика и транспорт. N 2, 1978, с. 107). Недостатками этого привода являются применение только для гребного движителя и отсутствие регулирования частоты вращения выходных валов.
Наиболее близким по устройству и по достигаемому результату является электромеханическая система для привода гребных винтов (а. с. СССР N 403003, H 02 P 5/34, 1973). В этом приводе установленные на корпусе два соосных ротора соединены с двумя гребными винтами, вращающимися в противоположных направлениях.
Недостатком такого привода является ограниченное его применение и постоянная частота вращения выходных валов. Увеличение крутящего момента достигается только за счет электромагнитных сил, что требует больших габаритов электропривода в сравнении с равноценной механической передачей.
Задачей изобретения является электропривод с одним выходным валом и плавным регулированием частоты вращения этого вала.
Задача достигается тем, что электропривод с двумя вращающимися в противоположных направлениях роторами установлен на неподвижной оси, закрепленной в корпусе, лапы которого крепятся к станине или к корпусу машины орудия. Со стороны выходного вала, который соединен с наружным ротором, установлены на оси подшипники наружного и внутреннего роторов. На выходном валу установлены токосъемные кольца, которые подводят переменный ток к обмотке внешнего ротора. Внутренний ротор имеет короткозамкнутую обмотку. С другой стороны роторы соединены кинематически регулируемой фрикционной передачей. Внутренний ротор соединен с ведущим катком, который установлен на подшипнике на оси привода. Ведущий каток имеет обод, состоящий из радиальных косых пластинчатых консолей, который изгибом компенсирует геометрическое скольжение, возникающее в пятнах контакта с конусами, равномерно расположенными по окружности обода катка. Количество конусов определяется условиями соседства. Конусы спарены между собой основаниями и установлены в обойме на подшипниках и осях, наклоненных к оси привода под углом, равным половине угла при вершине конуса. При этом крайние внутренние образующие одной группы конусов, контактирующих с ведущим катком, и крайние наружные образующие другой группы конусов, контактирующих с охватывающим ободом, становятся параллельными оси привода. Это обеспечивает возможность осевого перемещения обоймы со спаренными конусами при работе привода.
Охватывающий обод через упругие элементы взаимодействует с тупоугольными пазами кольца, соединенного с наружным ротором. Охватывающий обод состоит из пакета тонких плоских стальных, разрезанных в одном месте колец с равномерным размещением разрезов колец по окружности обода. На наружной поверхности каждого кольца обода имеются равномерно расположенные тупоугольные выступы, которыми каждое кольцо опирается на упругие элементы, установленные между стенками выступов и пазов большого кольца. Это взаимодействие передает крутящий момент, компенсирует совместно с канавками геометрическое скольжение и создает силы прижатия, пропорциональные передаваемому крутящему моменту второй и первой ступеней передач.
На внутренней рабочей поверхности колец имеются канавки глубиной 1 - 2 мм и шириной 2 - 4 мм, которые начиная от разреза равномерно располагаются по окружности колец, и число их кратно числу контактирующих конусов. Канавки и упругие элементы обеспечивают компенсацию геометрического скольжения за счет деформации упругих элементов.
Обойма со спаренными конусами крепится в корпусе на цилиндрических стержнях, которые могут перемещаться в корпусе в осевом направлении. Концы стержней, выходящие наружу, соединены с винтовой парой. Головка винта этой пары закреплена в корпусе с возможностью вращения. При вращении винта конусы перемещаются в осевом направлении, изменяя рабочие параметры. Передаточное отношение этого механизма определяется по формуле:
где d2 - рабочий диаметр на конусах, контактирующих с ведущим катком;
d4 - внутренний диаметр охватывающего обода;
d1 - диаметр ведущего катка;
d3 - рабочий диаметр на другом спаренном конусе у полюса качения.
Диапазон регулирования фрикционного механизма выразится формулой:
где d2max и d2min - максимальный и минимальный диаметры на конусах, контактирующих с ведущим катком;
d3max и d3min - максимальный и минимальный рабочие диаметры на конусах, контактирующих с охватывающим ободом.
Для увеличения диапазона регулирования следует перенести подшипники из спаренных конусов в стенки обоймы. Это позволит увеличить длину рабочей части образующих спаренных конусов.
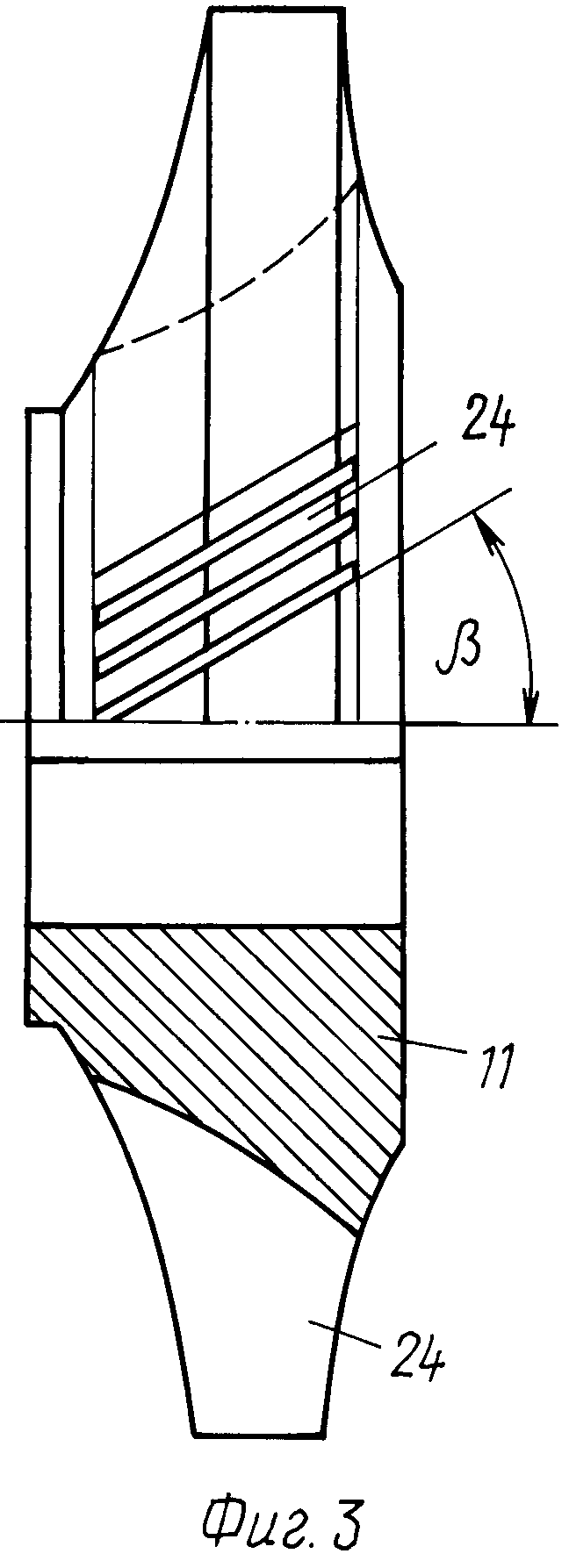
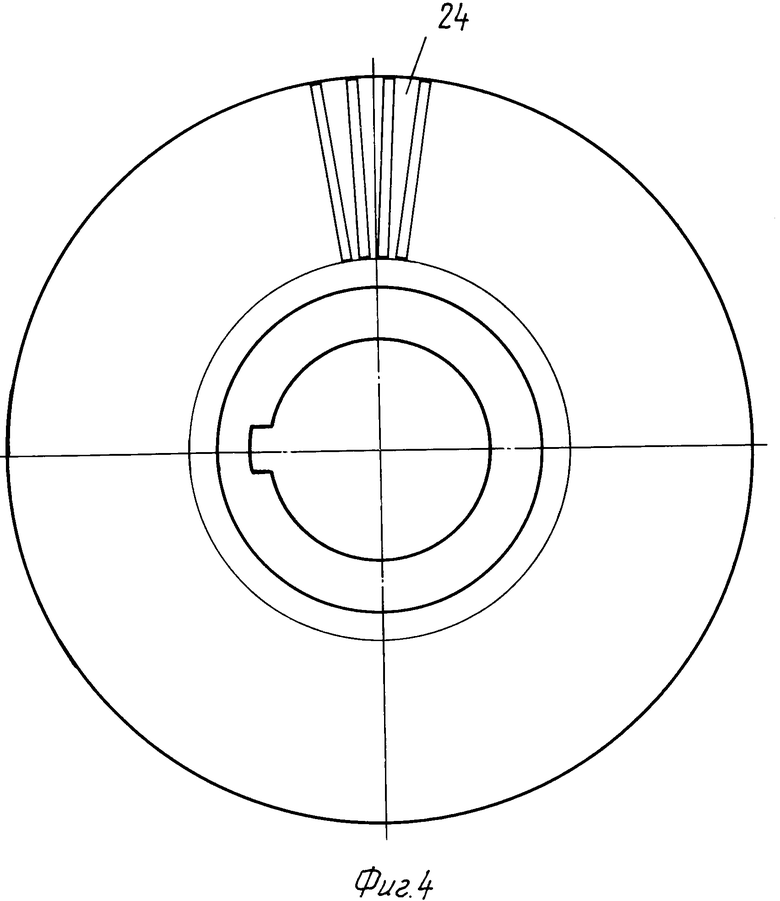
Для обеспечения равномерной тангенциальной упругости обода ведущего катка надо, чтобы в пятне контакта всегда находилось одинаковое число косых пластинчатых консолей. Это определяется углом β наклона консоли к образующей цилиндрической поверхности. Эта зависимость выражается формулой:
где n - число консолей в пятне контакта;
t - толщина рабочей поверхности консолей на кромке;
t1 - ширина прорези по кромке между консолями;
b - ширина обода.
Высоту консолей и другие параметры можно определить из системы уравнений, где первое уравнение есть равенство стрелы прогиба под действием касательной силы, приходящейся на одну консоль, и величины геометрического скольжения в данном сечении пятна контакта. Второе уравнение определяет нормальную толщину консоли у основания, третье уравнение определяет напряжения на изгиб в консоли под действием касательных сил.
где F - касательная сила, приходящаяся на одну консоль;
l - длина консоли в расчетном сечении;
β - угол наклона консоли к образующей цилиндра;
E - модуль упругости;
b0 - ширина консоли у основания;
t0 - нормальная толщина консоли у основания;
ε1 - относительное геометрическое скольжение, компенсируемое консолью у кромки, обращенной к полюсу качения, принимаемое конструктивно из условий работы передачи;
α - угол при вершине конуса;
x - расстояние от полюса качения до расчетного сечения обода;
d2- диаметр конуса у полюса качения;
t - толщина консоли по окружности рабочей поверхности;
L - расстояние от кромки обода у полюса качения до расчетного сечения;
nk - число консолей в ободе;
t1 - ширина прорези между консолями по окружности;
[σ] - допустимые напряжения на изгиб.
Из этой системы надо определить l, b0 и t0. Кроме того, каток надо проверить на контактные напряжения с учетом прорезей между консолями.
При расчете надо брать как минимум три положения: L = 0, 
Во второй ступени передачи охватывающий обод выполняет функции упругофрикционной передачи и создает силы прижатия для второй и первой ступеней передач. Эта сила зависит от угла наклона стенки паза к радиусу, проведенному в центр этой стенки  . Из треугольника векторов сил определяется оптимальный угол по формуле:
. Из треугольника векторов сил определяется оптимальный угол по формуле:
где γ - величина тупого угла;
d - диаметр окружности расположения середин упругих элементов;
μo - коэффициент трения покоя в контакте обода с конусами;
d4 - внутренний диаметр охватывающего обода.
На внутренней поверхности колец обода имеются канавки. Одна из них совпадает с разрезом, а число их кратно числу контактирующих конусов. На первом кольце от полюса качения, расположенного в направлении вершины конуса, имеется число канавок 1к, равное числу конусов, за этим кольцом установлены пакеты колец с числом канавок 2к, затем 3к и т.д. Задаемся для первого кольца относительным геометрическим скольжением ε1, которое будет компенсироваться этим кольцом при взаимодействии с упругими элементами.
При работе обода каждое кольцо работает самостоятельно. При входе пятна контакта на дугу между канавками окружная скорость поверхности конуса больше скорости поверхности кольца. При отсутствии скольжения конусы увлекают кольцо и при этом деформируют упругие элементы. Это компенсирует геометрическое скольжение. При подходе пятен контакта к очередным канавкам касательная сила достигает максимума, а над канавками кольцо теряет сцепление с конусами и силами упругости элементов возвращается в свободное состояние. Затем каждое пятно контакта переходит на другую дугу кольца, и процесс повторяется. Таким образом, каждое кольцо реализует среднюю касательную силу, равную половине максимальной.
Величина скольжения на длине дуги для первого кольца составит:
где K - число контактирующих конусов.
Из этой формулы видно, что величина скольжения зависит от относительного геометрического скольжения ε1 и длины дуги между канавками.
Чтобы "C" было постоянным, надо с увеличением относительного геометрического скольжения во столько же уменьшать длину дуги между канавками.
Относительное геометрическое скольжение в любой точке пятна контакта при описанном выше первом кольце выражается формулой:
где Xk - расстояние от полюса качения до расчетного сечения пятна контакта;
α - угол при вершине конуса;
d3 - диаметр на конусе в полюсе качения.
За первым кольцом установлены кольца с числом канавок 2к, а за ними 3к, 4к и т. д. В процессе работы обода кольца имеют относительное перемещение, что может привести к фреттинг-коррозии. Для исключения этого между кольцами нужно установить антифрикционные прокладки или покрыть боковые поверхности медью или графитом.
Для оптимальной работы колец охватывающего обода необходимо определить жесткость упругих элементов, которые обеспечат максимальную касательную силу при компенсации скольжения на длине дуги между канавками.
Это достигается решением системы двух уравнений, первое из которых есть равенство моментов касательных сил и сил упругости элементов, действующих на кольцо. Второе уравнение выражает пропорциональность геометрического скольжения на длине дуги к упругой деформации элементов, соответствующих диаметрам их расположения.
где Q - сила прижатия кольца к конусу;
Z - жесткость упругого элемента;
h - нормальная глубина погружения выступа в упругий элемент;
lэ - длина пятна контакта выступа кольца с упругим элементом;
nэ - число упругих элементов.
Из этой системы уравнений определяется Z и h.
На фиг. 1 показан продольный разрез электропривода; на фиг. 2 - разрез по А - А; на фиг. 3, 4 - ведущий каток; на фиг. 5 - расчетная схема.
На фиг. 1 корпус 1 лапами 2 крепится к корпусу машины орудия 3. В середине корпуса расположена неподвижная ось 4. На оси на подшипниках 5 установлен наружный ротор 6 с обмоткой переменного тока. Ротор соединен с выходным валом 7, на котором установлены токосъемные кольца 8. Внутренний ротор 9 с короткозамкнутой обмоткой установлен на оси на подшипнике 10. С другой стороны он крепится к ведущему катку 11 фрикционной передачи, который установлен на оси на подшипнике 12. Ведущий каток контактирует с группой спаренных конусов 13, число которых определяется по условиям соседства. Спаренные конусы установлены на подшипниках 14 и осях 15, наклоненных к оси привода под углом, равным половине угла при вершине конуса (на фиг. 1 - угол при вершине α = 60o). Спаренные конусы могут быть изготовлены стальными и из керамики (карбид бора, который в контакте со сталью имеет μ = 0,6 - 0,8).
Подшипники 14 могут быть вынесены в стенки обоймы (фиг. 5). Это позволит увеличить диапазон регулирования.
При наклонной установке осей крайние внутренние образующие конусов, контактирующих с ведущим катком, и крайние наружные образующие другой группы конусов становятся параллельными оси привода. Оси конусов установлены в обойме 16. Обойма цилиндрическими стержнями 17 крепится к корпусу 1 с возможностью осевого перемещения. Наружные концы стержней соединены с ходовой гайкой 18, которая перемещается по винту 19, головка которого закреплена в корпусе с возможностью вращения. При вращении винта и работе привода вся система стержней обоймы и конусов перемещается в осевом направлении, изменяя передаточное отношение.
Другая группа конусов 13 контактирует с охватывающим ободом 20, состоящим из пакета плоских тонких стальных, разрезанных в одном месте колец с равномерным распределением разрезов по окружности обода. Такое устройство обода обеспечивает прижатие его к конусам и безударную работу.
На наружной стороне колец имеются равномерно расположенные тупоугольные выступы 21 (фиг. 2), которые входят в такие же тупоугольные пазы большого кольца 22, которое крепится к наружному ротору 6. Между стенками тупоугольных выступов и пазов установлены упругие элементы 23 (например, резиновые), жесткость которых рассчитывается из системы уравнений (8).
Ведущий каток 11 (фиг. 3 и 4) компенсирует геометрическое и другие виды скольжений за счет изгиба консолей 24 под действием касательных сил, которые возникают при отсутствии скольжений в пятнах контакта.
В упругофрикционной передаче пятно контакта и полюс качения отличаются от пятен контакта и полюса качения таких же пар с жесткими телами качения. В предложенной передаче в контакте ведущего катка с конусами линейное пятно контакта имеет разрывы, связанные с прорезями между консолями, и не имеет трения скольжения. Линейные пятна контакта охватывающего обода с конусами состоят из точек контакта каждого кольца с конусами, что позволяет увеличить допустимые контактные напряжения.
В передачах с жесткими телами качения полюс качения находится в пределах пятна контакта. При выходе полюса качения за пятно контакта происходит буксование.
В упругофрикционной передаче полюс качения имеет теоретическое значение, так как отсутствует скольжение в пятне контакта. В расчетном режиме полюс качения находится за пределами пятен контакта. Это показано точками П1 и П2 (фиг. 5). В этом случае весь обод передает крутящий момент, что повышает тяговую способность обода.
Параметры консолей 24 обода ведущего катка определяются из решения системы уравнений (4). Угол наклона консолей к образующей определяется по формуле (3).
Охватывающий обод 20 является ведомым, и полюс качения второй ступени передачи смещается к вершинам конусов. Это показано на фиг. 5 точкой П2.
При определении величины выхода полюса качения за пятно контакта задаемся величиной относительного геометрического скольжения ε1, которое компенсируется первым кольцом. Компенсируемое скольжение первым кольцом составит:
При этом условии выход полюса качения за пятно контакта составит:
Такое же расстояние X1 будет между расчетными кольцами, реализующими полную расчетную касательную силу. В промежутках между этими кольцами устанавливаются кольца с одинаковым числом канавок. Число колец с одинаковым числом канавок определяется по формуле:
где B - толщина кольца.
Промежуточные кольца реализуют касательную силу меньше расчетной.
Работа электропривода основана на противоположном вращении наружного и внутреннего роторов, связанных регулируемой упругофрикционной передачей. При относительной частоте вращения роторов ω0 и частоте вращения выходного вала ω1 получим:
где i определяется по формуле (1).
Преимущества предлагаемого электропривода: обеспечивает регулирование частоты вращения выходного вала в широком диапазоне; компенсация геометрического и других видов скольжений в пятнах контакта фрикционных пар обеспечивает работу без смазки фрикционных поверхностей; разгрузка подшипников и осей от сил прижатия уменьшает потери энергии в узлах трения и уменьшает их массу.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХРОТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2096892C1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1995 |
|
RU2115848C1 |
| ВАРИАТОР | 1997 |
|
RU2131545C1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1999 |
|
RU2188973C2 |
| ТРАНСФОРМАТОР МОМЕНТА | 1998 |
|
RU2160400C2 |
| Каток упругофрикционной передачи | 1991 |
|
SU1816920A1 |
| Многопоточный конусный вариатор | 1976 |
|
SU696218A1 |
| Многопоточный фрикционный редуктор | 1988 |
|
SU1714257A1 |
| Многопоточный конусный вариатор | 1980 |
|
SU887838A2 |
| Ведущий каток упруго фрикционной передачи | 1980 |
|
SU937864A1 |
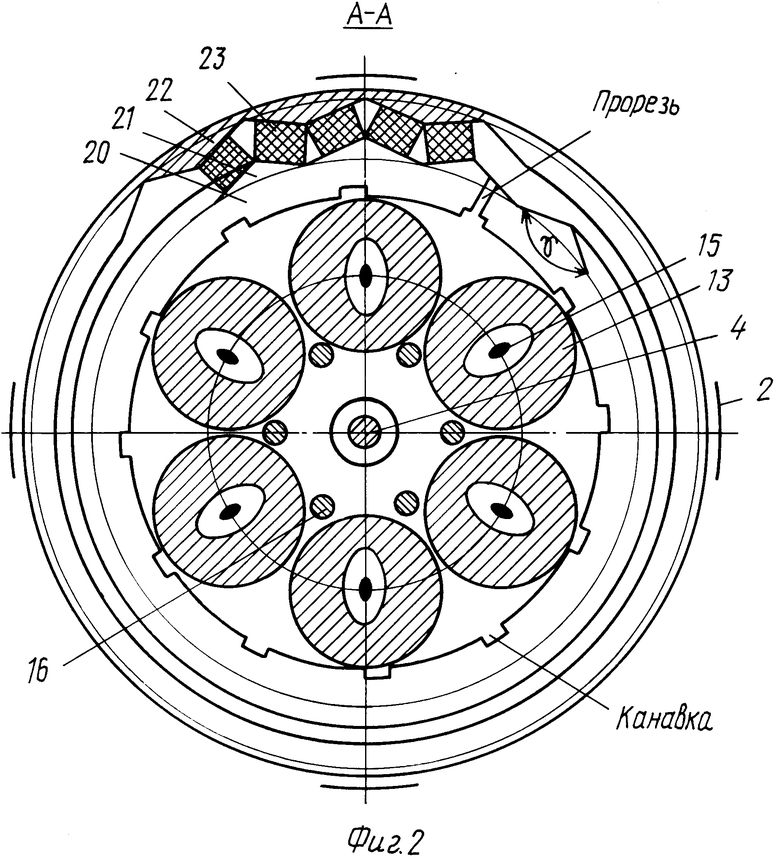

Использование: электроприводы. Сущность изобретения: электропривод имеет два соосных ротора 6 и 9 переменного тока, вращающихся в противоположных направлениях. Со стороны выходного вала роторы 6 и 9 посажены подшипниками на ось 4. С другой стороны внутренний ротор 9 соединен с ведущим катком 11 упругофрикционной передачи, связывающей кинематически внутренний 9 и наружный роторы 6. Ведущий каток 11 имеет обод, образованный косыми пластинчатыми консолями равного сопротивления изгибу касательными силами, такой обод катка 11 обеспечивает компенсацию геометрического и других видов скольжений в пятнах контакта со спаренными основаниями или вершинами конусами 13, которые установлены в обойме на подшипниках и осях, наклоненных к оси 4 привода под углом, равным половине угла при вершине конуса 13. Наружные образующие другой группы конусов 13 контактируют с охватывающим ободом 20, состоящим из пакета плоских стальных, разрезанных в одном месте колец с равномерным распределением разрезов по окружности пакета. На внутренней стороне колец имеются канавки, число которых кратно числу контактирующих конусов 13. На наружной поверхности имеются тупоугольные выступы 31, которые входят в тупоугольные пазы кольца, закрепленного на наружном роторе. Между выступом и пазом установлены упругие элементы, которые вместе с канавками обеспечивают компенсацию скольжений в пятнах контакта деформацией упругих элементов, тупоугольные пазы и выступы создают силы прижатия для первой и второй ступеней передачи. Механизм регулирования частоты вращения вала имеет стержни, установленные в корпусе с подвижной посадкой и закрепленных к обойме со спаренными конусами. Наружные концы стержней соединены с винтовой парой, которая обеспечивает осевое перемещение конусов. 2 з.п.ф-лы, 5 ил.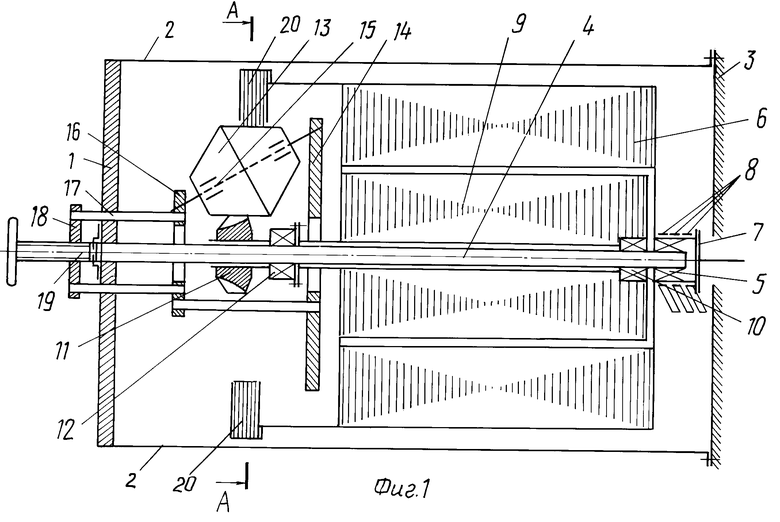
где n число консолей в пятне контакта;
t толщина рабочей поверхности консоли по кромке;
t1 ширина прорези по кромке между консолями;
b ширина обода;
β - угол наклона консоли к образующей цилиндра;
а параметры консолей определяются из системы уравнений, где первое выражает равенство стрелы прогиба консоли в разных сечениях и геометрического скольжения в тех же сечениях, второе уравнение выражает зависимость толщины консоли у основания от высоты консоли, третье уравнение выражает напряжение на изгиб у основания консоли под действием касательной силы.
где NK число колец с одинаковым числом канавок;
ε1 - относительное геометрическое скольжение, компенсируемое первым кольцом обода (принимается конструктивно);
d4 внутренний диаметр обода;
К число контактирующих конусов;
В толщина кольца;
α - угол при вершинах конусов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Парфенов Э.Е., Алексеева С.А | |||
| Исследование бесконтактного контрроторного каскада с синхронным генератором | |||
| - Известия АН СССР | |||
| Энергетика и транспорт, N 2, 1978, с.107 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 403003, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
