Изобретение относится к машиностроению и может быть использовано в различных отраслях промышленности, в частности в химическом машиностроении в грузоподъемных узлах агрегатов для автоматической подачи заготовки в рабочую зону.
Целью изобретения является повышение надежности механизма.
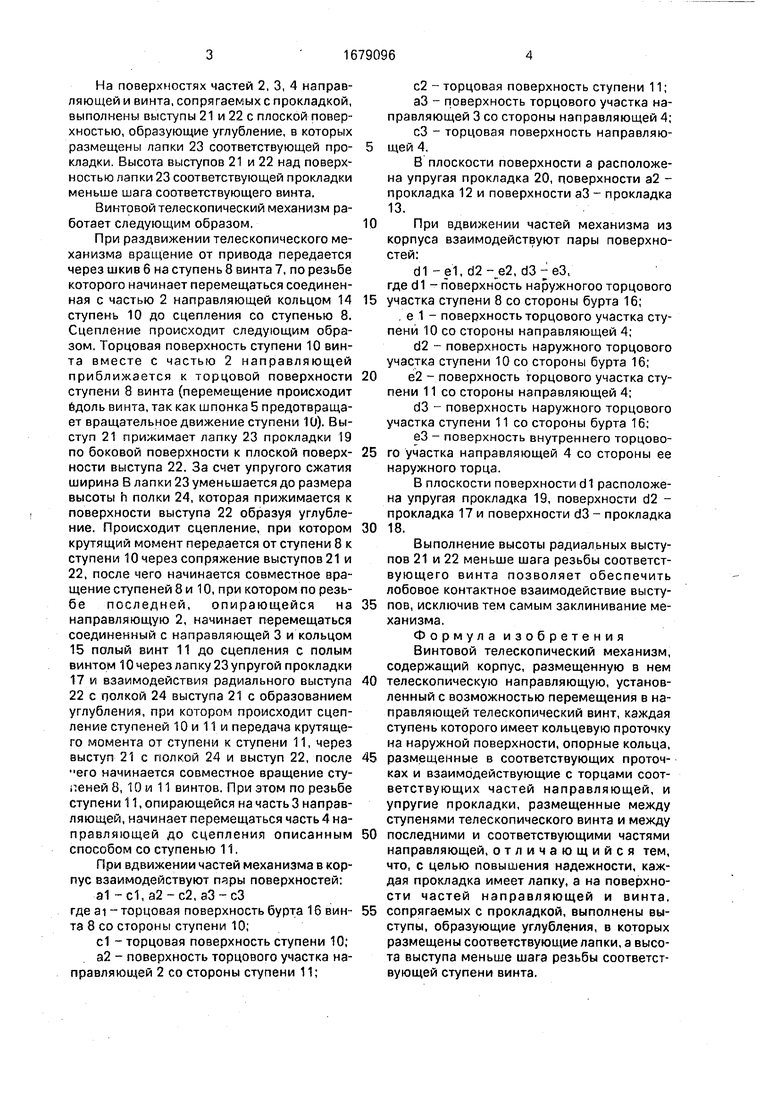
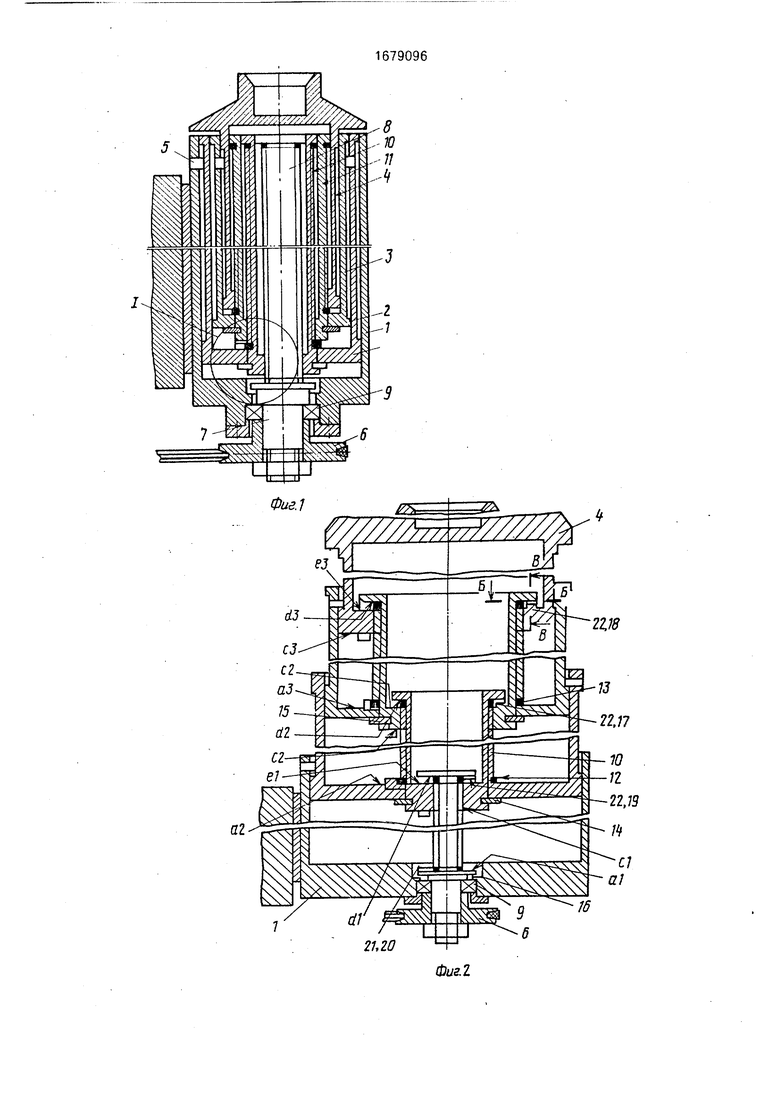
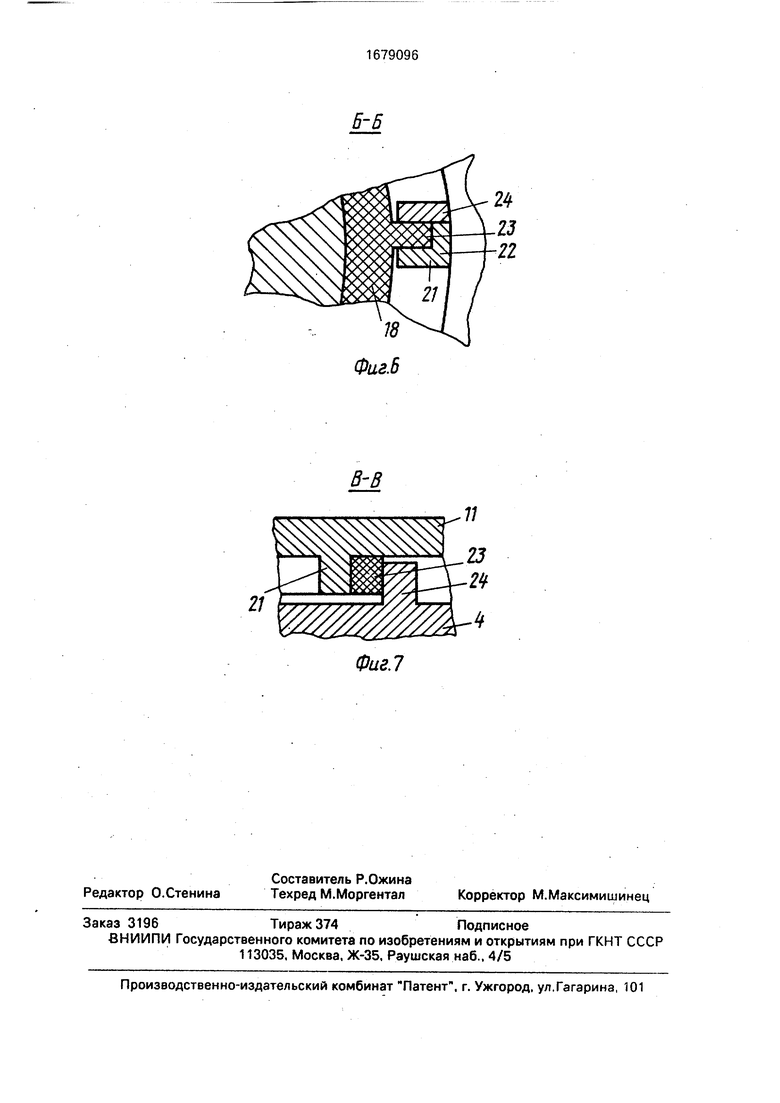
На фиг. 1 изображен телескопический винтовой механизм в исходном положении, общий вид; на фиг. 2 - то же в рабочем положении, общий вид; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - сечение А-А на фиг. 3 (до сопряжения выступов); на фиг. 5 - сечение А-А на фиг. 3 (при сопряжении выступов); на фиг. 6 - сечение Б-Б на фиг. 2; на фиг. 7 - сечение В-В на фиг. 2.
Винтовой телескопический механизм содержит корпус 1, размещенную в нем телескопическую направляющую, включающую части 2, 3 и 4, фиксируемые от осевого поворота продольными шпонками 5, приводкой шкив 6, связанный с телескопическим винтом 7, включающим ступень 8 винта, опирающуюся на подшипник 9, и полые ступени 10 и 11, опирающиеся на части 2 и 3 направляющих. Полые ступени 10 и 11 сопрягаются между собой по резьбе и со ступенью 8 винта 7. В радиальном направлении полые ступени 10 и 11 винта сопрягаются цилиндрической шейкой с частями 2 и 3 направляющей, а в осевом направлении - с упругими фрикционными прокладками 12 и 13 с одной стороны и разрезными в радиальном направлении кольцами 14 и 15, закрепленными на торцах частей 2 и 3 направляющей и производящими их взаимную фиксацию в осевом направлении, с другой стороны сопряжение в осевом направлении полых ступеней 10 и 11 винтов между собой, с направляющей 4, ступенью 8 и буртом 16, закрывающим подшипник 9, осуществляется упругими фрикционными прокладками 17-20.
сл
с
CN V4 О О Ю О
На поверхностях частей 2, 3, 4 направляющей и винта, сопрягаемых с прокладкой, выполнены выступы 21 и 22 с плоской поверхностью, образующие углубление, в которых размещены лапки 23 соответствующей прокладки. Высота выступов 21 и 22 над поверхностью лапки 23 соответствующей прокладки меньше шага соответствующего винта.
Винтовой телескопический механизм работает следующим образом,
При раздвижении телескопического механизма вращение от привода передается через шкив 6 на ступень 8 винта 7, по резьбе которого начинает перемещаться соединенная с частью 2 направляющей кольцом 14 ступень 10 до сцепления со ступенью 8. Сцепление происходит следующим образом, Торцовая поверхность ступени 10 винта вместе с частью 2 направляющей приближается к торцовой поверхности ступени 8 винта (перемещение происходит вдоль винта, так как шпонка 5 предотвращает вращательное движение ступени 1U). Выступ 21 прижимает лапку 23 прокладки 19 по боковой поверхности к плоской поверхности выступа 22. За счет упругого сжатия ширина В лапки 23 уменьшается до размера высоты h полки 24, которая прижимается к поверхности выступа 22 образуя углубление. Происходит сцепление, при котором крутящий момент передается от ступени 8 к ступени 10 через сопряжение выступов 21 и 22, после чего начинается совместное вращение ступеней 8 и 10, при котором по резь- бе последней, опирающейся на направляющую 2, начинает перемещаться соединенный с направляющей 3 и кольцом 15 полый винт 11 до сцепления с полым винтом 10 через лапку 23 упругой прокладки 17 и взаимодействия радиального выступа 22 с полкой 24 выступа 21 с образованием углубления, при котором происходит сцепление ступеней 10 и 11 и передача крутящего момента от ступени к ступени 11, через выступ 21с полкой 24 и выступ 22, после его начинается совместное вращение ступеней 8, 10 и 11 винтов. При этом по резьбе ступени 11, опирающейся на часть 3 направляющей, начинает перемещаться часть 4 на- правляющей до сцепления описанным способом со ступенью 11.
При вдвижении частей механизма в корпус взаимодействуют пары поверхностей:
а1 -d, а2-с2, аЗ-сЗ где ai -торцовая поверхность бурта 16 винта 8 со стороны ступени 10;
с1 -торцовая поверхность ступени 10;
а2 - поверхность торцового участка направляющей 2 со стороны ступени 11;
с2 -торцовая поверхность ступени 11; аЗ - поверхность торцового участка направляющей 3 со стороны направляющей 4; сЗ - торцовая поверхность направляю- щей 4.
В плоскости поверхности а расположена упругая прокладка 20, поверхности а2 - прокладка 12 и поверхности аЗ - прокладка 13.
При вдвижении частей механизма из корпуса взаимодействуют пары поверхностей:
d1 -e1, , d3 - еЗ, где d1 - поверхность наружногоо торцового участка ступени 8 со стороны бурта 16;
е 1 - поверхность торцового участка ступени 10 со стороны направляющей 4;
d2 - поверхность наружного торцового участка ступени 10 со стороны бурта 16; е2 - поверхность торцового участка ступени 11 со стороны направляющей 4;
d3 - поверхность наружного торцового участка ступени 11 со стороны бурта 16;
еЗ - поверхность внутреннего торцово- го участка направляющей 4 со стороны ее наружного торца.
В плоскости поверхности d1 расположена упругая прокладка 19, поверхности d2 - прокладка 17 и поверхности d3 - прокладка 18.
Выполнение высоты радиальных выступов 21 и 22 меньше шага резьбы соответствующего винта позволяет обеспечить лобовое контактное взаимодействие высту- пов, исключив тем самым заклинивание механизма.
Формула изобретения Винтовой телескопический механизм, содержащий корпус, размещенную в нем телескопическую направляющую, установленный с возможностью перемещения в направляющей телескопический винт, каждая ступень которого имеет кольцевую проточку на наружной поверхности, опорные кольца, размещенные в соответствующих проточках и взаимодействующие с торцами соответствующих частей направляющей, и упругие прокладки, размещенные между ступенями телескопического винта и между последними и соответствующими частями направляющей, отличающийся тем, что, с целью повышения надежности, каждая прокладка имеет лапку, а на поверхности частей направляющей и винта. сопрягаемых с прокладкой, выполнены выступы, образующие углубления, в которых размещены соответствующие лапки, а высота выступа меньше шага резьбы соответствующей ступени винта.
16
21,20
8
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО | 2011 |
|
RU2461762C1 |
| Винтовой телескопический механизм | 1984 |
|
SU1221419A1 |
| РЕГУЛИРУЕМАЯ ПО ДЛИНЕ ПАЛКА ДЛЯ ХОДЬБЫ И ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ НЕЕ | 2010 |
|
RU2488328C2 |
| Силовой замок для соединения деталей | 1978 |
|
SU881391A2 |
| Шиберный затвор | 1980 |
|
SU925550A1 |
| НАСОСНЫЙ АГРЕГАТ | 2004 |
|
RU2280194C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ РЕЖУЩЕГО ИНСТРУМЕНТА | 1995 |
|
RU2101142C1 |
| ЭЛЕКТРОУСТАНОВОЧНАЯ КОРОБКА | 1994 |
|
RU2110876C1 |
| РЕГУЛИРУЕМЫЙ КЛАПАН ДЛЯ НАПОЛНЕНИЯ СМЫВНЫХ БАЧКОВ | 2009 |
|
RU2493333C2 |
| УСТРОЙСТВО ПОДАЧИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2014 |
|
RU2621400C2 |
Изобретение относится к машиностроению и может быть использовано в различных отраслях промышленности, в частности в химическом машиностроении в грузоподъемных узлах агрегатов для автоматической подачи заготовки. Целью изобретения является повышение надежности механизма. Для получения положительного эффекта каждая прокладка имеет лапку, а на поверхности частей 2,3,4 направляющей и винта, сопрягаемых с прокладкой, выполнены выступы, образующие углубления, в которых размещены соответствующие лапки. При вращении ступени 8 винта 7 начинает перемещаться полый винт 10. Один выступ прижимает лапку одной из прокладок по боковой поверхности к плоской поверхности другого выступа. За счет упругого сжатия лапка попадает в углубление и происходит сцепление винта 7 с винтом 10. 7 ил.
нО
ФигЛ
Фаг.З
Фиг.5
18
Фаг.5
Фаг
| Винтовой телескопический механизм | 1984 |
|
SU1221419A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
