Известные автоматические регуляторы натяжения, например, нити, нерематываемой на бобину, шииндель которой установлен иа рычаге, выполненные в виде неподвижной тормозной гребенки со стержнями и аналогичной подвижной гребенки, не создают точности натяжения нити, например, при переходе па мотку пряжи другого номера или при изменении вида нитей.
В описываемом автоматическом регуляторе для повышения точности натяжения нити основание подвижной гребенки выполнено в вида плоской пружины, соединенной с поршневым гидравлическим демпфером для гашения ее собственных колебаний и скрепленной с одним или двумя якорями, направляемыми роликами для устранения перекоса и взаимодействующими с одним или двумя компенсируюш,ими магнитами с переставными магнитными шунтами или одним или двумя компенсируюш,ими электромагнитами с переменными сопротивлениями в цени их питания. С целью изменения натяжения нити в зависимости от изменения диаметра наматываемой бобины, рычаг ее шпинделя посредством рычажной передачи соединен с подвижным шунтом компенсируюн,его магнита или с движком переменного сопротивления в цепи питания комненсируюнлего электромагнита.
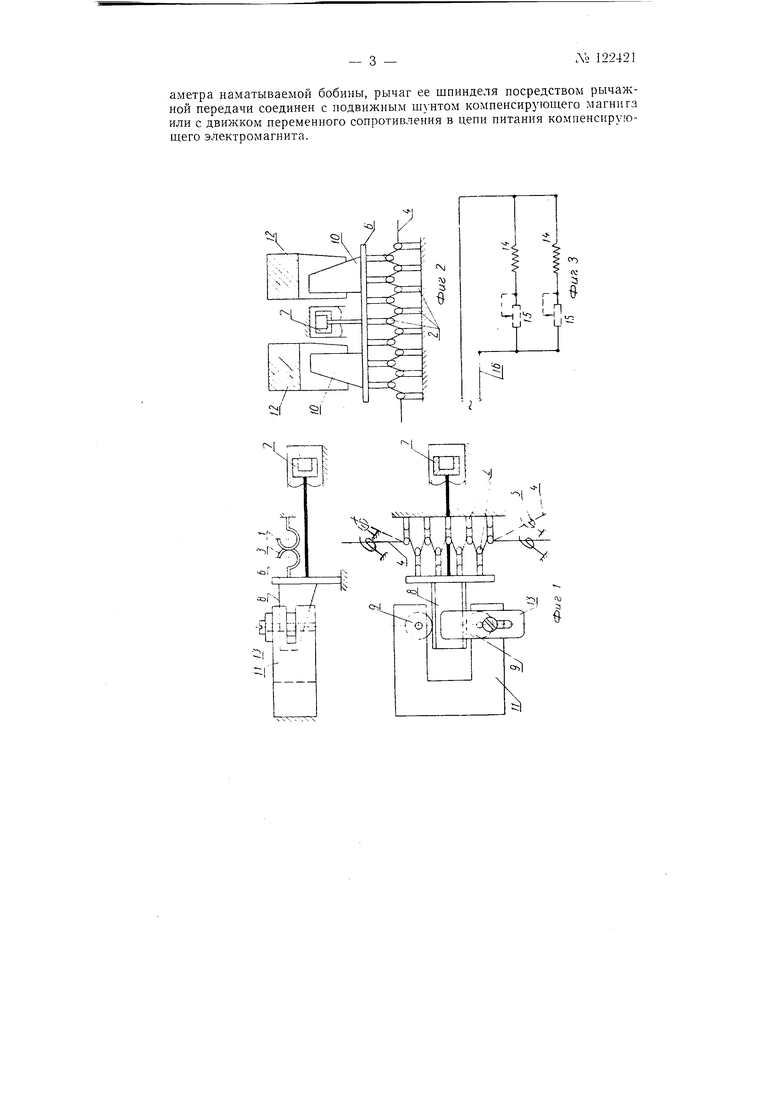
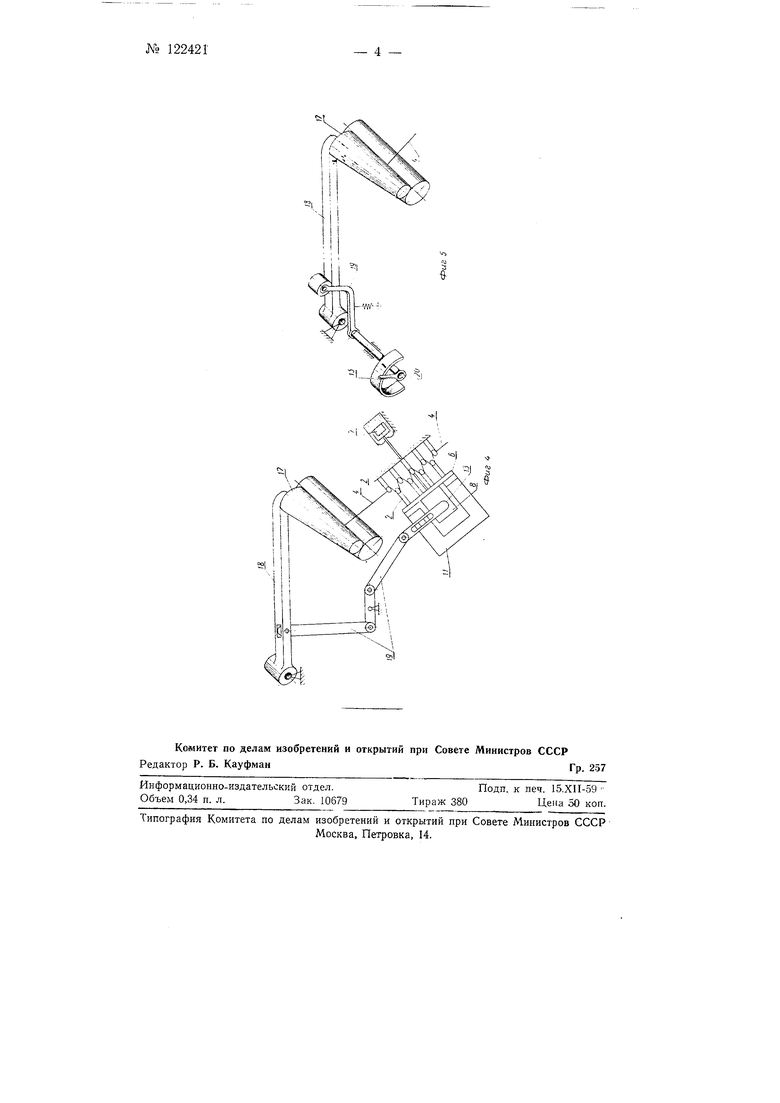
На фиг. 1 изображен регулятор натяжения нити с одним компенсируюшим магнитом, в двух проекциях; на фиг. 2 - регулятор е двумя компенсирующими магнитами; на фиг. 3 - то же, с компенсирующими электромагнитами; на фиг. 4 - то же, при изменении диаметра наматываемой бобины при компенсирующих магнитах; на фиг. 5 - то же, при компенсирующих электромагнитах.
М -1224 21 2 -
Автоматический регулятор натяжения выполнен в виде неподвижной тормозной гребенки / со стержнями 2 и аналогичной подвижной гребенки 3. Стержни -2 гребенок / и 3 оги-баются нитью 4, проходящей через нитенаправители 5. Основание подвижной гребенки 3 представляет плоскую пружину 6, соединенную с поршневым гидравлическим демпфером 7 для гашения ее собственных колебаний. Пружина 6 скреплена с одним якорем 8, Направляемым для устранения перекосов ролик,4/вы или с двумя якорями 10. Якоря 8 и 10 взаимодействуют соответственно с одним комленсирующнм магнитом // или с двумя компенсирующими магнитами 12 с переставными магнитными шунтами 13, или с одним или двумя электромагнитами 14 с переменными сопротивлениями /. в цепи 16 питания их. Для изменения натяжения нити 4 в зависимости от изменения диаметра бобины /7 рычаг 18 ее шпинделя посредством рычажной передачи /Р соединен с подвижным шунтом 13 компенсирующего магнита // или с движком 20 переменного сопротивления 15 в цепи 16 питания компенсирующего электромагнита 14.
Автоматический регулятор натяжения нити работает следующим образом.
Нить 4 при заправке на бобину /7 пропускают попеременно между стержнями 2 подвижной и неподвижной тормозных гребенок 1 и 3.
Нить 4, охватывая стержни 2, вследствие возникающего между Hejo и стержнями 2 трения затормаживается и получает натяжение, которое должно постепенно уменьпшться при намотке бобины 17, а также меняется при изменении номера нити и ее вида. Регулярное натяжение пити 4 с тем, чтобы ее натяжение на выходе из тормозных гребенок / и 3 оставалось постоянным, происходит за счет разных углов охвата ею стержней 2 вследствие изменения прогиба пружины 6, корректируемого компенсирующими магнитами 12 и 11 или электромагнитами 14. При переходе на перемотку нитей другого номера величину патяжения нити изменяют путем регулирования положения магнитного шунта 13 илп тока в электромагнитах 14, а при другом виде пряжи - изменением числа стержней 2 и перемещением нитенаправителей 5 для сохранения угла входа нити 4 в тормозные гребенки 1 и 3. Гашение собственных колебаний нити производится демпфером 7.
При изменении натяжения нити 4 в зависимости от диаметра бобины 17 рычаг 18 ее щпинделя посредством рычажной передачи 19 автоматически перемещает подвижной шунт 13 компенсирующих магнитоз // или 12 или движок 20 переменного сопротивления 15 в цепи 16 питания компенсирующих электромагнитов 14.
Предмет изобретения
1.Автоматический регулятор натяжения, например, нити, перематываемой на бобину, шпиндель которой установлен на рычаге, выполненный в виде неподвижной тормозной гребенки со стержнями и аналогичной подвижной гребенки, отличающийся тем, что, с целью повышения точности натяжения нити, основание подвижной гребенки выполнено в виде плоской пружины, соединенной с поршневым гидравлическим демпфером для гашения ее собственных колебаний и скрепленной с одним или двумя якорями, направляемыми роликами для устранения перекоса и взаимодействуюшими с одним или двумя компенсирующими магнитами с переставными магнитными шунтами или с одним или двумя компенсирующими электромагнитами с переменными сопротивлениями в цепи их питания.
2.Форма выполнения регулятора по п. 1, отличающаяся тем, что, с целью изменения патяжения нити в зависимости от изменения диаметра наматываемой бобины, рычаг ее шпинделя посредством рычажной передачи соединен с подвижным шунтом компенсируюн1его магнита или с движком переменного сопротивления в цепи питания компенсирующего электромагнита.
| название | год | авторы | номер документа |
|---|---|---|---|
| Упругая балочка к прибору для измерения натяжения, например нити | 1958 |
|
SU124188A1 |
| Самовес для питания чесальных машин | 1959 |
|
SU126041A1 |
| Установка для перематывания основныхНиТЕй | 1979 |
|
SU848491A1 |
| Мотальный механизм | 1979 |
|
SU848459A1 |
| Устройство для активной подачи нити | 1978 |
|
SU852980A1 |
| Регулятор натяжения длинномерного материала | 1987 |
|
SU1454774A1 |
| Регулятор натяжения провода | 1977 |
|
SU729651A1 |
| Полуавтомат для наматывания дисковых шпуль | 1959 |
|
SU126778A1 |
| ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 2013 |
|
RU2545163C1 |
| АВТОМАТ ДЛЯ ПЛЕТЕНИЯ ИЗДЕЛИЙ ИЗ ПРОВОЛОКИ | 1969 |
|
SU245674A1 |