Изобретение относится к контрольно-измерительной технике и может быть использовано в системах автоматики различных технологических процессов, например на угольных предприятиях, для измерения положения различных объектов.
Цель изобретения - повышение точности регулировки нуля выходной характеристики бесконтактного датчика положения в условиях эксплуатации.
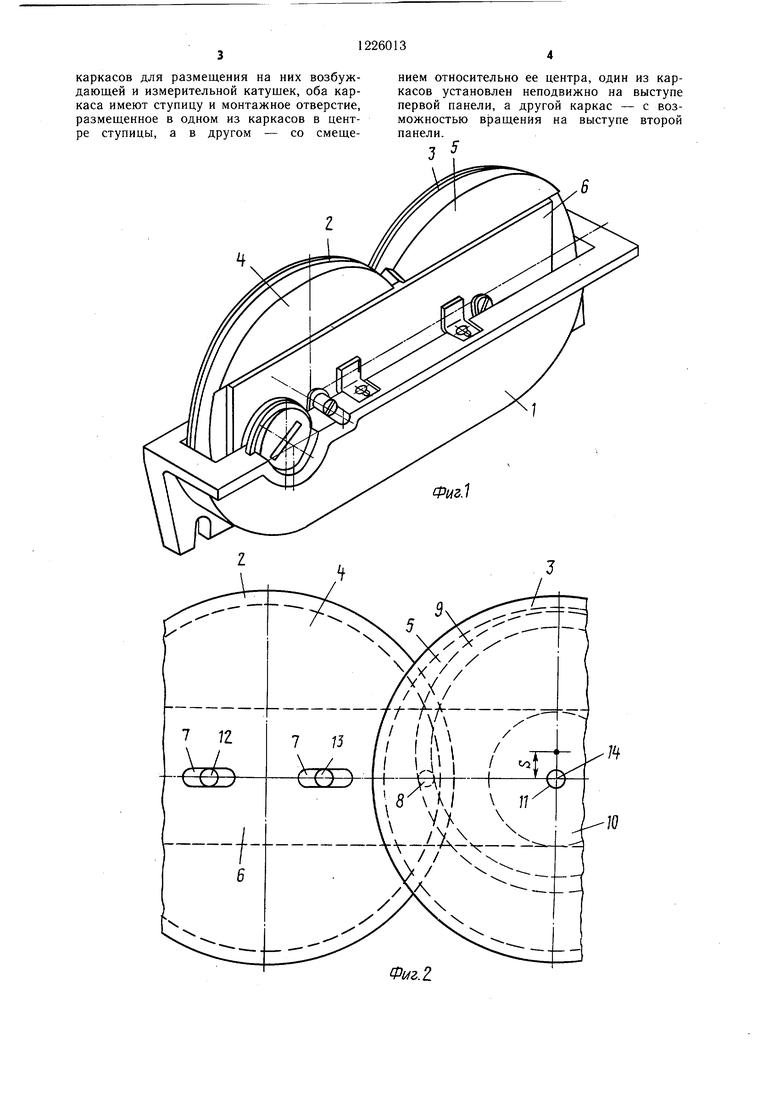
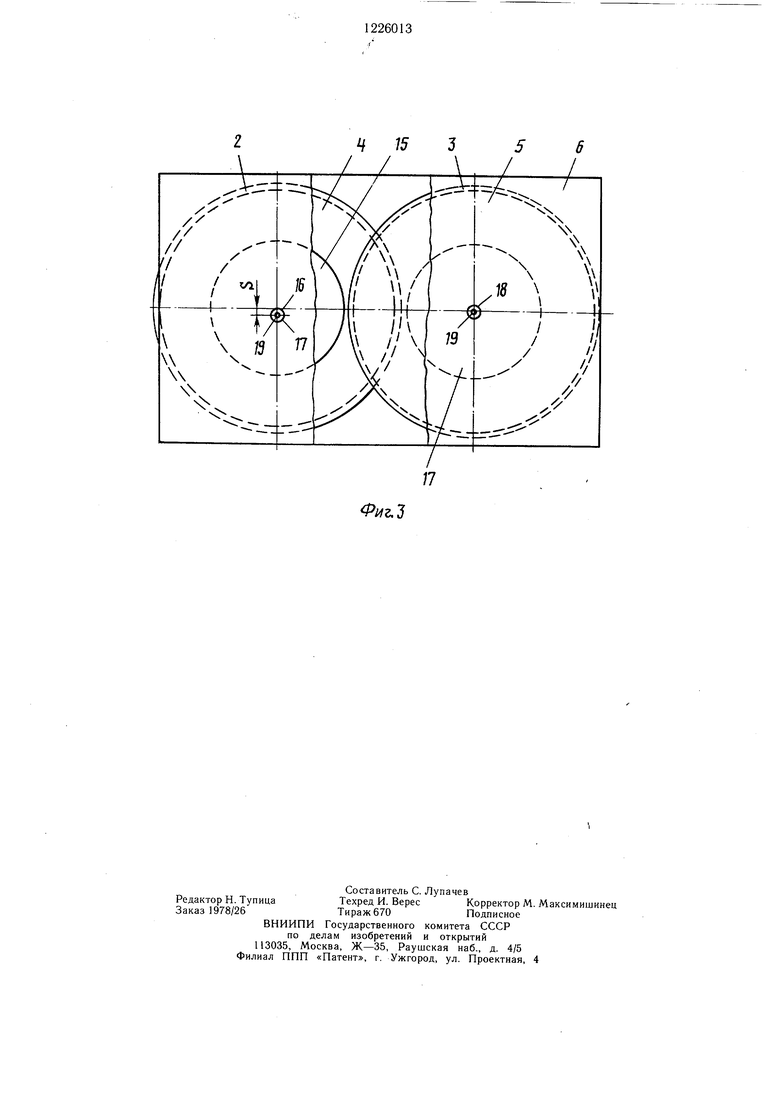
На фиг. 1 изображена конструкция бесконтактного датчика положения индукционного типа; на фиг. 2 и 3 - варианты средств регулировки относительного смещения катушек датчика.
Бесконтактный датчик положения содержит немагнитный корпус 1 и размещеннь1е в нем возбуждающую и измерительную катушки 2 и 3 соответственно. Катущки 2 и 3 размещены на каркасах 4 и 5 и установлены на немагнитной монтажной панели 6 в параллельных плоскостях, частично перекрывая одна другую. Катушки 2 и 3 могут быть смещены одна относительно другой для изменения площади их относительного перекрытия с помощью предусмотренных для этого средств относительного смещения катущек 2 и 3.
В первом варианте исполнения средства смещения выполнены следующим образом. Каркас 4 одной катущки выполнен с двумя прорезями 7 и выступом 8, а каркас 5 другой катушки имеет эксцентрично смещенный относительно ее центра круговой паз 9, ступицу 10 и отверстие 11. Каркасы размещены на монтажной немагнитной панели 6, снабженной тремя выступами 12, 13 и 14.
Во втором варианте исполнения эти средства смещения катущек 2 и 3 (фиг. 3) выполнены следующим образом. Каркас 4 снабжен ступицей 15 и эксцентрично смещенным относительно центра каркаса на величину S отверстием 16. Каркас 5 имеет ступицу 17 и центральное отверстие 18. Каркасы размещены между немагнитными панелями 6 на ее двух цилиндрических выступах 19.
Бесконтактный датчик положения работает следующим образом.
В исходном положении (до заливки катущек 2 и 3 компаундом) после подачи напряжения питания на возбуждающую ка- тущку 2 и при отсутствии объекта контроля производят настройку датчика по минимуму сигнала в измерительной катушке 3. После заливки каждой катушки и установки датчика на место эксплуатации производится
10
положенной на каркасе 4, относительно катущки 3, расположенной на каркасе 5.
Во втором варианте относительное смещение катущек осуществляется поворотом каркаса 4 относительно эксцентрично смещен ного отверстия 16, в результате которого катущка 2 перемещается относительно катущки 3.
При приближении ферромагнитного объекта со стороны открытого торца корпуса 1 изменяется индуктивная связь между возбуждающей и измерительной катущ- ками 2 и 3 и на выходе измерительной катущки 3 появляется информационный сигнал, величина которого зависит от положения ферромагнитного объекта. Датчик не реагирует на приближение ферромагнитных тел со сторон, закрытых ферромагнитным корпусом - экраном.
Изобретение позволяет повысить точность измерения положения ферромагнитного 2Q объекта благодаря более точной настройке нуля путем обеспечения плавного изменения площади перекрытия катушек, т.е. их взаи.мо индуктивной связи в зоне нуля характеристики преобразования датчика.
15
25
30
35
40
45
Формула изобретения
. Бесконтактный датчик положения, содержащий корпус и размещенные в нем возбуждающую и измерительную плоские катущки, расположенные в параллельных плоскостях и частично перекрывающие одна другую, отличающийся тем, что, с целью повыщения точности регулировки нуля выходной характеристики датчика в условиях эксплуатации, он снабжен средствами регулировки относительного смещения катущек.
2. Датчик по п. 1, отличающийся тем, что средство регулировки относительного смещения катушек выполнено в виде закрепленной на корпусе немагнитной панели с тремя выступами и двух круглых каркасов, предназначенных для размещения на них возбуждающей и измерительной катушек оДин из каркасов выполнен с двумя прорезями, предназначенными для взаимодействия с двумя выступами панели, и с расположенным на одной прямой с ними выступом, другой каркас выполнен со ступицей, имеющей в центре отверстие для ввода в него третьего выступа немагнитной панели, и с эксцентрично смещенным отокончатедьная подстройка датчика путем сме- 50 носительно отверстия круговым пазом, предщения одной катушки относительно другой. В первом варианте это смещение осуществляется поворотом каркаса 5 вокруг оси, проходящей через отверстие 11. При этом в результате взаимодействия эксцентричного кругового паза 9 с цилиндрическим выступом 8 происходит поступательно- вращательное перемещение катушки 2, рас55
назначенным для взаимодействия с выступом первого каркаса.
3. Датчик по п. 1, отличающийся тем, что средство регулировки относительного сме щения катущек выполнено в виде закрепленных на корпусе двух немагнитных панелей, каждая из которых имеет цилиндрический выступ и отверстие, и двух круглых
положенной на каркасе 4, относительно катущки 3, расположенной на каркасе 5.
Во втором варианте относительное смещение катущек осуществляется поворотом каркаса 4 относительно эксцентрично смещенного отверстия 16, в результате которого катущка 2 перемещается относительно катущки 3.
При приближении ферромагнитного объекта со стороны открытого торца корпуса 1 изменяется индуктивная связь между возбуждающей и измерительной катущ- ками 2 и 3 и на выходе измерительной катущки 3 появляется информационный сигнал, величина которого зависит от положения ферромагнитного объекта. Датчик не реагирует на приближение ферромагнитных тел со сторон, закрытых ферромагнитным корпусом - экраном.
Изобретение позволяет повысить точность измерения положения ферромагнитного объекта благодаря более точной настройке нуля путем обеспечения плавного изменения площади перекрытия катушек, т.е. их взаи.мо- индуктивной связи в зоне нуля характеристики преобразования датчика.
Формула изобретения
. Бесконтактный датчик положения, содержащий корпус и размещенные в нем возбуждающую и измерительную плоские катущки, расположенные в параллельных плоскостях и частично перекрывающие одна другую, отличающийся тем, что, с целью повыщения точности регулировки нуля выходной характеристики датчика в условиях эксплуатации, он снабжен средствами регулировки относительного смещения катущек.
2. Датчик по п. 1, отличающийся тем, что средство регулировки относительного смещения катушек выполнено в виде закрепленной на корпусе немагнитной панели с тремя выступами и двух круглых каркасов, предназначенных для размещения на них возбуждающей и измерительной катушек, оДин из каркасов выполнен с двумя прорезями, предназначенными для взаимодействия с двумя выступами панели, и с расположенным на одной прямой с ними выступом, другой каркас выполнен со ступицей, имеющей в центре отверстие для ввода в него третьего выступа немагнитной панели, и с эксцентрично смещенным относительно отверстия круговым пазом, предносительно отверстия круговым пазом, пред
назначенным для взаимодействия с выступом первого каркаса.
3. Датчик по п. 1, отличающийся тем, что средство регулировки относительного смещения катущек выполнено в виде закрепленных на корпусе двух немагнитных панелей, каждая из которых имеет цилиндрический выступ и отверстие, и двух круглых
каркасов для размещения на них возбуждающей и измерительной катушек, оба каркаса имеют ступицу и монтажное отверстие, размещенное в одном из каркасов в центре ступицы, а в другом - со смещением относительно ее центра, один из каркасов установлен неподвижно на выступе первой панели, а другой каркас - с возможностью вращения на выступе второй панели.
W
W
.Z
,:3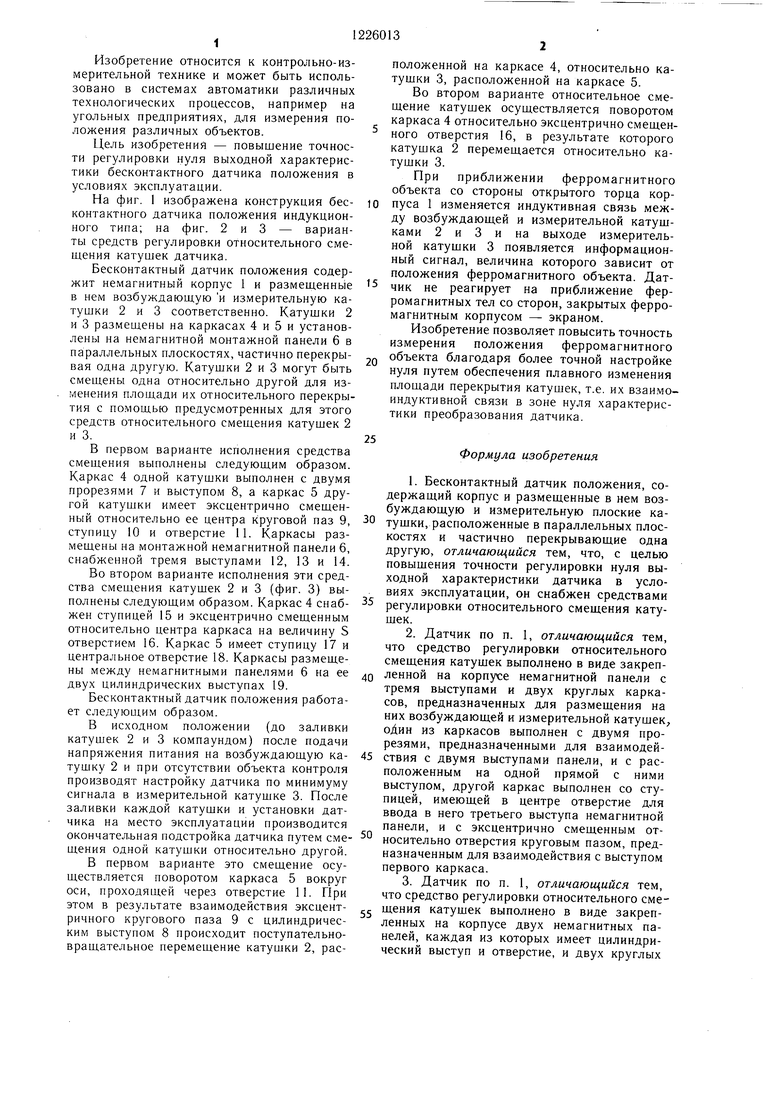
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для контроля эксцентричности покрытий электродов со стержнями из ферромагнитных материалов | 1974 |
|
SU541101A1 |
| Устройство для автоматического направления электрода по стыку | 1977 |
|
SU742063A1 |
| ПАТЕНТНА- <| оТ?ХНИЧШ:АХ ^^ \ | 1969 |
|
SU254689A1 |
| Устройство для измерения давления | 1985 |
|
SU1265501A1 |
| Датчик линейных перемещений | 1991 |
|
SU1820196A1 |
| Трансформаторный датчик углового положения | 1980 |
|
SU1007008A1 |
| Датчик положения перемещающегося объекта | 1979 |
|
SU781542A1 |
| Индукционный зонд для определения дефектов обсадных колонн | 1982 |
|
SU1052656A1 |
| Накладной вихретоковый преобразователь с вращающимся полем | 1986 |
|
SU1415166A1 |
| Индукционный датчик | 1981 |
|
SU1007052A1 |
Изобретение относится к контрольно-измерительной технике и позволяет повысить точность бесконтактного датчика положения контролируемого объекта. Датчик содержит корпус с размешенными в нем воз- буждаюшей и измерительной катушками, которые установлены с возможностью регулировки их положения относительно одна другой. Благодаря этому изменяется пло- шадь относительного перекрытия катушек, что позволяет точно регулировать положение нуля выходной характеристики преобразования датчиков положения. Рассмотрены варианты выполнения средств относительного смешения катушек. 2 з.п. ф-лы, 3 ил. S to to О5
| Датчики контроля положения, унифицированные ДКПУ (проспект) | |||
| Ворошиловград: Облполиграфиздат, 1983 | |||
| Бесконтактный датчик положения | 1979 |
|
SU964769A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
