Изобретение относится к измеритель ной технике и автоматике и может быть использовано в различньк систе -- Maji автоматического управления и регулирования, системах ориентации, а также в других областях техники, таких как точное приборостроение.
Цепь изобретения - повышение точности системы управления при одновре манном повьшении ее ремонтопригодности.
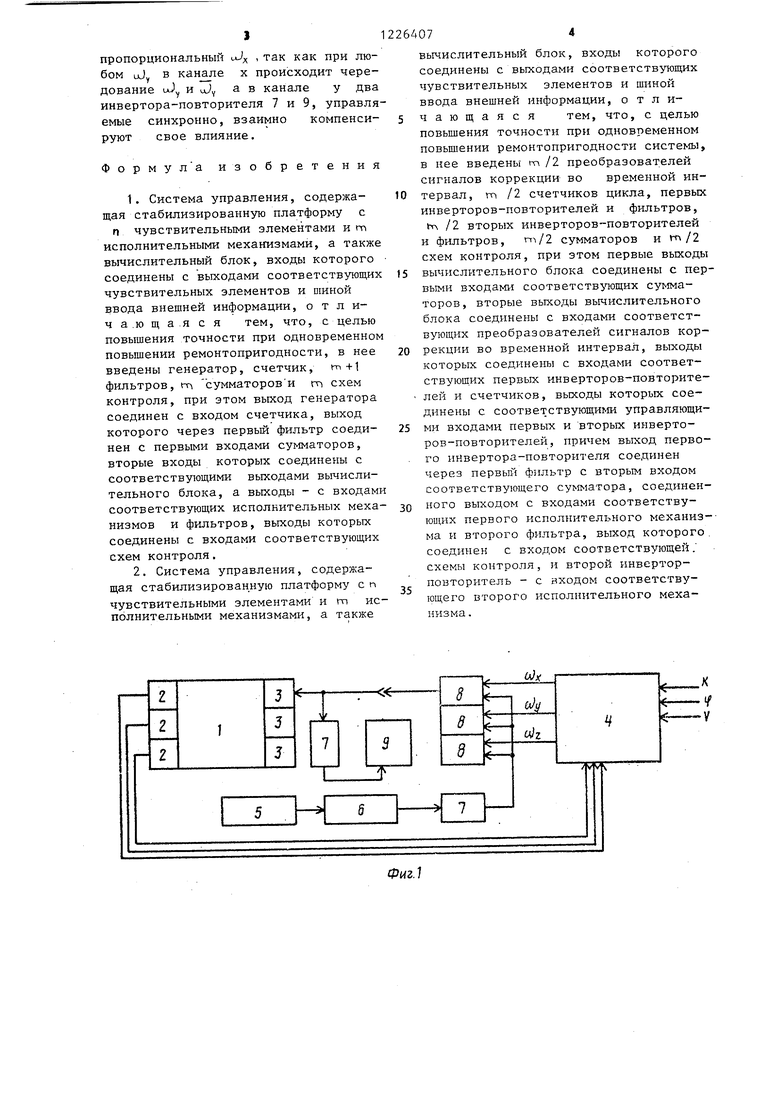
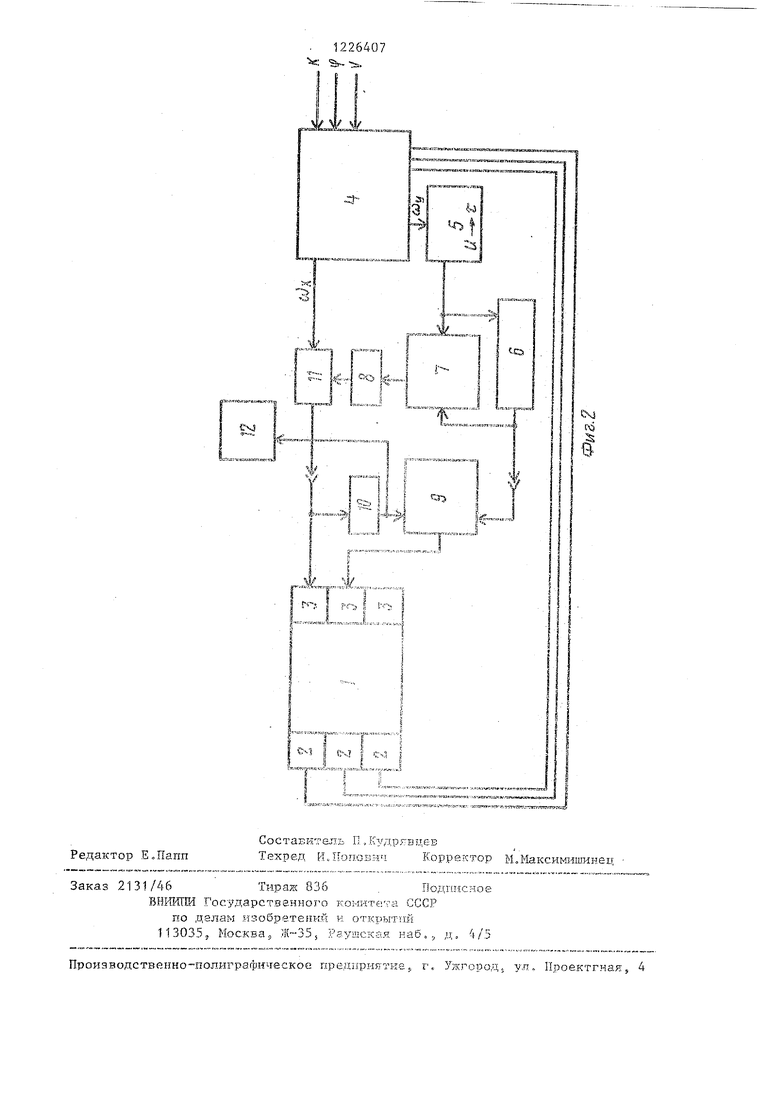
На фиг о 1 изображена система управления, первый варинат; на фиг, 2 то же, второй вариант.
Система управления по первому 1за- рианту исполнения содержит стабилизированную платформу 1 5,h чувствитель - ных элементов 2,-п исполнительных механизмов 3, вычислительный блок 4, генератор 5, счетчик б, m+l фильтров 7 низкой частоты, тп сумматоров 8 и f-n схем контроля 9.
Система управления по второму варианту исполнения содержит стабили- зированн по платформу 1 , чувствк- тельньгх элементов 2. v-n исполнительных механизмов 3, вычислительный блок 4 5 преобразователей 5 сигналов коррекции во временной интервал, ьт/2 счетчиков 6 цикла, /2 первых инверторов-повторителей 7 и ri/2 первых фи,льтров 8} tT, /2 вторых инверторов-повторителей 9 и /2 вторых фильтров Юр 1-п /2 сумматоров 11 и схем 12 контроля
Система управления (фиг. 1) работает следующим образом.
Информация от чувствительных эле:- ментов 2, расположенных на платформе
fS
20
2S
30
ров 8„ Фильтр 7 может быть вьтолнен в виде разделительного конденсатора или Я С -фильтра и предназначен для исключения постоянной составляющей сигнала на выходе счетчика 6 и на входе схем 9 контроля.
Таким образом, на вход механизма 3 через контакт кабеля поступает сумма аналогового сигнала uJ,, и меандра без постоянной составляющей. Механизмы 3 платформь 1 являются достаточно инерционными, а частота генератора 5 выбирается порядка единиц килогерц так что переменная составляющая суммарного сигнала, проходящего через контакт, не оказывает влияния на подведение системы в целом, но обеспечивает прохождение постоянной составляющей с амплитудой менее высоты потенциального барьера. Кроме того, посредством схемы 9, которая может 5ыть выполнена, например, в виде пос- ледов 1тельно соединенных выпрямителей и 1;ветодиода, эта переменная составляющая позволяет осутцествить непрерывный.,контроль исправности линии связи., что необходимо для своевременного обнару кения и устранения неис- 1травности.
При достаточно большом количестве сигналов коррекции (в реальных системах оно может быть равно шести и более) наиболее целесообразньм является применение устройства, выполненного по второму варианту(фиг. 2). В этодМ случае выходные сигналы блока 4 объединяются попарно (на фиг. 2 для примера приведены iJ и uj ). Величина u,)v подается на один вход сумма1, поступает в блок 4, который в прос-цдтора 11, а на другой его вход податейшем случае может быть уси:1ителем.ггся поочередно L и uJ в Bf-ще широтВ соответствиии с информацией отко-импульсньк сигналов, которые форчувствительных элементо-в 2 внешней-чиру ются преобразователем 5.
информации ( о скорости объекта, о широте места и курсе) блок 4 вырабатывает ряд управляющих воздействий 1х), uJ и т,д которые поступают на управляющие обмотки механизмов 3, На фиг, 1 для простоты показан ка- нап передачи uJj, но все прочие каналы также включают cj -мматор 8, фильтр 7 я схему 9,
На вход счетчика 6, например одноразрядного, поступают импульсы с вы- хйда генератора 5, в результате чего на выходе счетчика 6 присутствует меандр, которьй через первьй фильтр 7 поступает на первые входы суммато
0
ров 8„ Фильтр 7 может быть вьтолнен в виде разделительного конденсатора или Я С -фильтра и предназначен для исключения постоянной составляющей сигнала на выходе счетчика 6 и на входе схем 9 контроля.
Таким образом, на вход механизма 3 через контакт кабеля поступает сумма аналогового сигнала uJ,, и меандра без постоянной составляющей. Механизмы 3 платформь 1 являются достаточно инерционными, а частота генератора 5 выбирается порядка единиц килогерц так что переменная составляющая суммарного сигнала, проходящего через контакт, не оказывает влияния на подведение системы в целом, но обеспечивает прохождение постоянной составляющей с амплитудой менее высоты потенциального барьера. Кроме того, посредством схемы 9, которая может 5ыть выполнена, например, в виде пос- ледов 1тельно соединенных выпрямителей и 1;ветодиода, эта переменная составляющая позволяет осутцествить непрерывный.,контроль исправности линии связи., что необходимо для своевременного обнару кения и устранения неис- 1травности.
При достаточно большом количестве сигналов коррекции (в реальных системах оно может быть равно шести и более) наиболее целесообразньм является применение устройства, выполненного по второму варианту(фиг. 2). В этодМ случае выходные сигналы блока 4 объединяются попарно (на фиг. 2 для примера приведены iJ и uj ). Величина u,)v подается на один вход сумма
Импульсы с выхода преобразова теля 5 подаются также на счетчик б (вновь одноразрядный)j выходной сигнал которого управляет работой инверторов- повторителей 7 и 9 Пусть, например, на вькоде счетчика б в i-м цикле
работь преобразователя 5 присутствует сигнал логической единицы, по которому инверторы-повторители 7 не инвертируют ..Jy , а в (t- + 1)-M цикле - сигнал логического нуля.
На механизм 3 канала ., будет поступать переменный сигнал с постоянной составляющей, ,пропорциональной иД, 5 а на механизм 3 канала х пропорциональный uJ , так как при любом uJ в х происходит чередование uJ и vjjy а в канале у два инвертора-повторителя 7 и 9, управляемые синхронно, взаимно компенсируют свое влияние.
Форму л а изобретения
1.Система управления, содержащая стабилизированную платформу с
п чувствительными элементами и m исполнительными механизмами, а также вычислительный блок, входы которого соединены с выходами соответствующих чувствительных элементов и шиной ввода внешней информации, о т л и- ч а .ю щ а ,я с я тем, что, с целью повышения точности при одновременном повьш1ении ремонтопригодности, в нее введены генератор, счетчик, т.+1 фильтров, fr сумматоров и m схем контроля, при этом выход генератора соединен с входом счетчика, выход которого через первьш фильтр соединен с первыми входами сумматоров, вторые входы которых соединены с соответствующими выходами вычислительного блока, а выходы - с входами соответствуюа;их исполнительных механизмов и фильтров, выходы которых соединены с входами соответствующих схем контроля.
2.Система управления, содержащая стабилизирован ную платформу с h
чувствительными элементами и гп исполнительными механизмами, а также
0
5
0
5
0
вычислительный блок, входы которого соединены с выходами соответствующих чувствительных элементов и шиной ввода внешней информации, отличающаяся тем, что, с целью повьшения точности при одновременном повьтшнии ремонтопригодности системы, в нее введены кл/2 преобразователей сигналов коррекции во временной интервал, m /2 счетчиков цикла, первых инверторов-повторителей и фильтров, 1ч /2 вторых инверторов-повторителей и фильтров, rtV2 сумматоров и m/2 схем контроля, при этом первые выходы вычислительного блока соединены с первыми входами соответствующих сумматоров , вторые выходы вычислительного блока соединены с входами соответствующих преобразователей сигналов коррекции во временной интервал, выходы которых соединены с входами соответствующих первых инверторов-повторителей и счетчиков, выходы которых соединены с соответствующими управляющими входами первых и вторых инверторов-повторителей, причем выход первого инвертора-повторителя соединен через первый фильтр с вторым входом соответствующего сумматора, соединенного выходом с входами соответствующих первого исполнительного механиз-- ма и второго фильтра, выход которого, соединен с входом соответствующей; схемы контроля, и второй инвертор- повторитель - с входом соответствующего второго исполнительного механизма .
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1987 |
|
SU1462232A1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| Система управления | 1987 |
|
SU1444707A1 |
| Устройство управления | 1984 |
|
SU1229721A1 |
| Система управления | 1985 |
|
SU1302238A1 |
| Фазовый модулятор с умножением частоты | 1978 |
|
SU758476A1 |
| Датчик угловой скорости | 1985 |
|
SU1296949A1 |
| Устройство для анализа спектра фазовых флуктуаций | 1982 |
|
SU1041948A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1226086A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1336241A1 |
Изобретение относится к области измерительной техники и может быть использовано в системах автоматичес| -..jf кого регулирования. Цель изобретения - повьттение точности при одновременном повьшюнии ремонтопригодности, системы. Система содержит стабилизи- . рованную платформу с чувствительными элементами и исполнительными механизмами, а также вычислительный блок. Передача управляющих сигналов производится посредством суммирования их с меандром без постоянной составляющей, что позволяет контролировать исправность линии связи. Для воспроизведения заданного сигнала в систему введены генератор, счетчик, сумматоры и ф1-шьтры. 2 с.п.. 2 ил. tnnal to bO а о 
Редактор Е.Папп
Составитель 11ЛСудргвцеЕ
Техред ИЛТоповипКорректор Мо1 1аксимишинец
Заказ 2131/46Тираж 836.Подписное
ВИШтаИ Государственисч о комите -га СССР
по делам язобрете(5кй и открытий 113035, Москваэ Ж-ЗЗ, Раушская наб,, дь 4/5
Производственно-полиграфическое предприятие,, г, Ужгород, ул, Проектгнак, 4
| Гироскопические системы./Под | |||
| ред | |||
| Д.С.Пельгора, ч.1 | |||
| - М.: Высшая школа, 1977, с.128-167 | |||
| ,(54) СИСТЕМА УПРАВЛЕНИЯ (ЕЕ ВАРИАНТЫ) |
