Изобретение относится к гироскопической технике и может найти широкое применение при управлении гиростабилизйрованными -платформами.
Цель изобретения - расширение частотного диапазона системы.
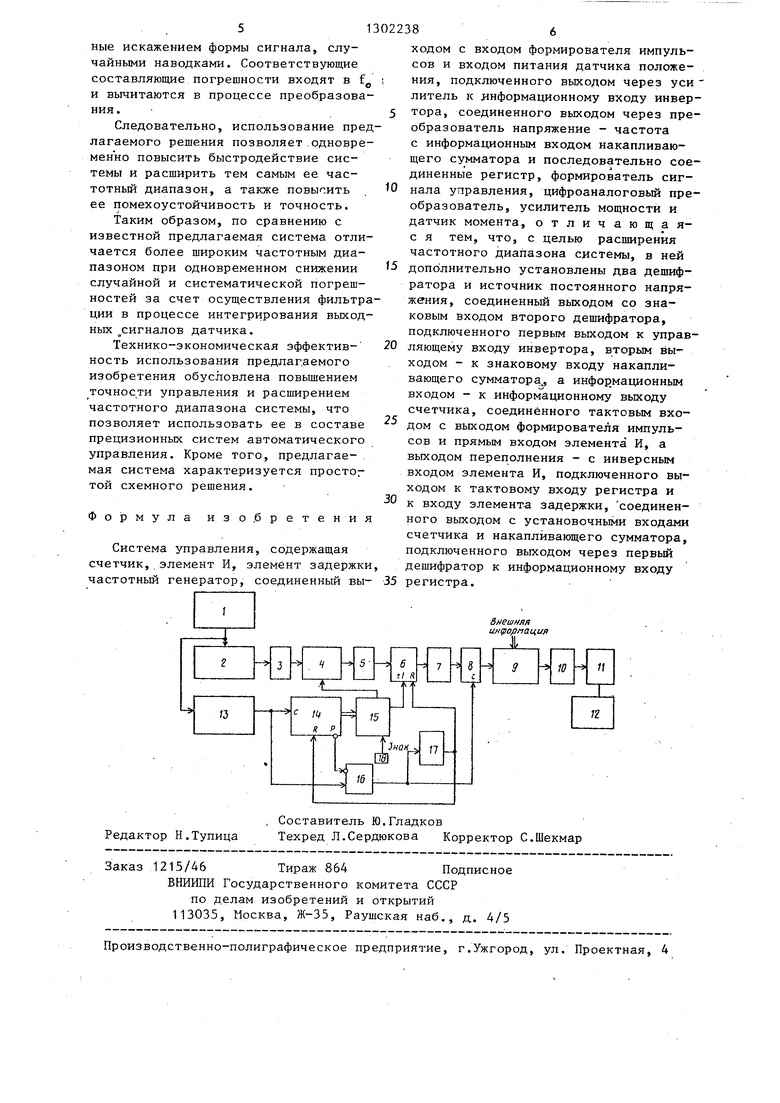
На чертеже представлена блок-схема системы.
Система управления содержит частотный генератор 1, датчик 2 положения, усилитель 3, инвертор 4, преобразователь 5 напряжение - частота, накапливающий сумматор 6, первый дешифратор 7, регистр 8, формирователь 9 сигнала управления, цифроаналого- вый преобразователь 10, усил итель
11мопщости, датчик 12 момента, формирователь 13 импульсов, счетчик 14, второй дешифратор 15, элемент И 16, элемент 17 задержки, источник 18 постоянного напряжения.
В качестве датчика 2 положения может быть использован как амплитудный, так и фазовый датчик положения угла, например ВТ.
Накапливающий сумматор 6 может быть выполнен в виде реверсивного двоичного счетчика. Дешифраторы 7 и 15 проектируются по стандартной методике синтеза цифровых автоматов и заданной таблицы истинности.
Формирователь 9 сигнала управле-; ния может быть выполнен так же, как в известной системе. В частном случае это может быть накапливающий сум матор или блок умножения в зависимости от алгоритма выработки управляющего сигнала. Например, если управляющий сигнал, подаваемый на датчик
12момента, должен представлять со- бой сумму сигнала внешней информации, по ступающего на второй вход формирователя 9 сигнала управления, и масштабированного выходного сигнала датчика 2 положения, формирователь 9 сигнала управления выполняется в виде последовательно сЬеди- ненных блока умножения и сумматора, причем на первый вход блока умноже- ния подается выходной ;код регистра 8
а на второй его вход - код масштабирующего коэффициента, например с пульта, на второй вход сумматора поступает сигнал внешней информации
Формирователь 13 импульсов может быть выполнен в виде последовательно соединенных компаратора (детектора опорного уровня) или детектора
5
0
нулевого уровня и собственно форми- , рователя, который в свою очередь может быть вьшолнен в виде последовательно соединенных дифференциатора и выпрямителя (R-С цепочка и диод), в результате чего импульс на выходе формирователя 13 импульсов появляется каждый раз, когда его входное напряжение достигает заданного уровня, в частности нуля.
Элемент 17 задержки может быть выполнен в виде четного числа последовательно соединенных инверторов. Его время задержки должно быть меньше минимального периода выходных импульсов преобразователя 5 напряжение - частота, но больше времени, необходимого для перезаписи кода в регистр В.
Примером таблицы истинности дешифратора 15 может служить следующая таблица.
35
Дешифратор 7 выполняется на базе стандартного постоянного запоминающего устройства (ПЗУ), реализующего функцию, обратную той, которая реали- зуется датчиком t 2 положения сов- местно с накапливающим сумматором 6. Так,например, если амплитуда переменного выходного напряжения датчика 2 положения пропорциональна углу поворота чувствительного элемента, первый дешифратор 7 передает на выход прямой код. Если амплитуда выходного сигнала датчика 2 положения пропорциональна синусу указанного угла, первый дешифратор 7 реализует функцию арксинус. Если информация о положении чувствительного элемента заключается в фазе выходного сигнала датчика 2 положения, дешифратор выполняет функцию арккосинус.
Счетчик 14 в приведенном выше примере выполняется двухразрядным.
Система управления работает следующим образом.
Выходной сигнал датчика 2 положения после усиления в усилителе 3 преобразуется в частоту с помощью преобразователя 5 напряжение - частота, который формирует частоту f, если напряжение на его входе равно нулю, частоту f + uf при положительном напряжении на входе и „ - д - при отрицательном. Эта частота накапливается в накапливаю - щем сумматоре 6 в течение фиксированного числа полупериодов выходного напряжения частотного генератора 1, отсчет которых производится счетчиком 14 по сигналу формирователя 13 импульсов.
В рассмотренном примере выполнения второго дешифратора 15 зто число равно 2, при этом в течение обоих полупериодов на вход преобразователя 5 напряжение - частота подае ся положительное напряжение, что достигается включением инвертора 4 на входе преобразователя 5 напряжение - частота, сдвиг фаз между выходным сигналом частотного генератора 1 и. выходным сигналом датчика 2 положения не превышает 180 . Если сдвиг фаз больше, то на знаковый вход второго дешифратора 15 подаетного напряжения и на его первом выходе сигналы инвертируются.
I
ся выходной сигнал источника постоян-35 ной системы, в которой преобразование
осуществляется в течение двух полупериодов, причем в обоих на вход преобразователя 5 напряжение - частота поступает неинвертированный сигнал с выхода усилителя 3, в первом на знаковый вход накапливающего сумматора 6 поступает логическая едиВ результате к концу указанного четного числа полупериодов в накапливающем сумматоре 6 накапливается величина, пропорциональная сумме f и амплитуды или фазы выходного сигнала датчика 2 положения. После это40
ница,
а во втором - лигическии нуль.
В то же время выделение постоян- го знак сигнала на первом выходе „„г
... НОИ составляющей выходного сигнала
рого дешифратора 15 меняется на противоположный и в течение последующих полупериодов, число которых равно первоначальному, из накопленного значения вычитается величина, Q пропорциональная f . Например, накопление величины f + &f может производиться в течен ие двух полупери- одов и вычитание величины также в
датчика 2 положения требует при той же частоте возбуждения порядка 30- 40 мс. Следовательно, частотный диапазон предлагаемой системы расширен по сравнению с известной по крайней
мере на порядок. I
Поскольку выходной сигнал датчика 2 положения поступает на посл течение двух полупериодов. При этом довательно соединенные преобразователь 5 напряжение - частота и на капливающий сумматор 6, осуществля щие его интегрирование, исключаютс составляющие погрешности, обусловл
в течение последнего полупериода на выходе йереполнения счетчика 14 присутствует логическая единица.Для того, чтобы значение выходного кода
3022384
первого- дешифратора 7
W
15
20
25
30
переписывалось в регистр 8 только с приходом последнего четкого Чв рассмотренном примере четвертого) импульса с выхода формирователя 13 импульсов, длительность выходного импульса последнего выбирается менее времени задержки счетчика 14 по выходу переполнения. Если ЭТО условие осуществить невозможно, на выходе переполнения счетчика 14 устанавливается, дополнительный элемент 17 задержки.
В этом случае в момент прихода последнего, четвертого импульса на вход счетчика 14 информация о положении чувствительного элемента из дешифратора 7 переписывается в регистр 8 и поступает в формирователь 9 сигнала управления, осуществляющий фор- Ч ирование управляющего сигнала.
Через интервал времени, равный времени задержки элемента 17 задержки, счетчик 14 и накапливающий сумматор 6 обнуляются и процесс повторяется.
Таким образом, предлагаемая система может работать как с амплитудным, так и с фазовым датчиком положения. При этом формирование управляющего сигнала может быть осуществлено за 1-2 периода частоты частотного генератора 1, т.е. за 2 мс, если частота частотного генератора 1 равна 1 кГц. В частности, возможна реализация данница,
а во втором - лигическии нуль.
датчика 2 положения требует при той же частоте возбуждения порядка 30- 40 мс. Следовательно, частотный диапазон предлагаемой системы расширен по сравнению с известной по крайней
мере на порядок. I
Поскольку выходной сигнал датчика 2 положения поступает на посл довательно соединенные преобразователь 5 напряжение - частота и накапливающий сумматор 6, осуществляющие его интегрирование, исключаются составляющие погрешности, обусловленные искажением формы сигнала, случайными наводками. Соответствующие составляющие погрешности входят в f и вычитаются в процессе преобразования.
Следовательно, использование предлагаемого решения позволяет одновременно повысить быстродействие системы и расширить тем самым ее частотный диапазон, а также повысить ее помехоустойчивость и точность.
Таким образом, по сравнению с известной предлагаемая система отличается более широким частотным диапазоном при одновременном снижении случайной и систематической погрешностей за счет осуществления фильтрации в процессе интегрирования выходных сигналов датчика.
Технико-экономическая эффектив- ность использования предлагаемого изобретения обусловлена повьшением точности управления и расширением частотного диапазона системы, что позволяет использовать ее в составе прецизионных систем автоматического управления. Кроме того, предлагаемая система характеризуется простог той схемного решения.
Формула изо.бретения Система управления, содержащая
счетчик, элемент И, элемент задержки, дешифратор к информационному входу частотный генератор, соединенный вы- 35 регистра.
Редактор Н.Тупица
Составитель Ю.Гладков
Техред Л.Сердюкова Корректор С.Шекмар
Заказ 1215/46 Тираж 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
i
10
3022386
ходом с входом формирователя импульсов и входом питания датчика положения, подключенного выходом через уси литель к информационному входу инвертора, соединенного выходом через преобразователь напряжение - частота с информационным входом накапливающего сумматора и последовательно соединенные регистр, формирователь сигнала управления, цифроаналоговый преобразователь, усилитель мощности и датчик момента, отличающа я- с я тем, что, с целью расширения частотного диапазона системы, в ней 5 дополнительно установлены два дешифратора и источник постоянного напряжения, соединенный выходом со знаковым входом второго дешифратора, подключенного первым выходом к управляющему входу инвертора, вторым выходом - к знаковому входу накапливающего сумматора., а информационным входом - к информационному выходу счетчика, соединённого тактовым входом с выходом формирователя импульсов и прямым входом элемента И, а выходом переполнения - с инверсным входом элемента И, подключенного выходом к тактовому входу регистра и к входу элемента задержки, соединенного выходом с установочными входами счетчика и накапливающего сумматора, подключенного выходом через первый
20
25
30
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1987 |
|
SU1444707A1 |
| Устройство управления | 1984 |
|
SU1229721A1 |
| Регулятор | 1987 |
|
SU1462232A1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1262730A1 |
| Датчик угловой скорости | 1985 |
|
SU1296949A1 |
| Коррелятор | 1981 |
|
SU1024933A1 |
| Масштабирующий преобразователь | 1982 |
|
SU1038880A1 |
| Цифровой датчик | 1985 |
|
SU1352651A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1988 |
|
SU1501002A1 |
Изобретение относится к гирр- скопической технике и может найти широкое применение при управлении гиростабилизированными платформами. Целью изобретения является расши- рейие частотного диапазона системы. Поставленная цель достигается за счет того, что выходной сигнал частотного генератора подается на вход формирователя импульсов и вход питания датчика положения. Выходной сигнал датчика положения через последовательно соединенные усилитель, инвертор, преобразователь напряжение - частота, накапливающий сумматор, первый дешифратор и регистр поступает на вход формирователя сигнала управления, выходной сигнал которого через цифроаналоговый преобразователь и усилитель мощности подается на вход датчика момента. Выходной сигнал формирователя импульсов поступает на тактовый вход счетчика и прямой вход элемента И, на инверсный вход которого поступает сигнал с выхода переполнения счетчика. Сигнал с информационного счетчика поступает на информационный вход второго дешифратора, его первый выходной сигнал подается на управляющий вход инвертора, его второй сигнал - на знаковый вход накапливающего сумматора. Выходной сигнал элемента И подается на тактовый вход регистра и на вход элемента задержки. Выходной сигнал элемента задержки поступает на установочные входы счетчика и сумматора. 1 табл., 1 ил. с S (Л оо о ю ND ОЭ ОО
| Гироскопические системы./Под ред | |||
| Д.С.Пельпора | |||
| М.: Высшая школа, 1977, Ч.1, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Регулятор | 1984 |
|
SU1260913A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
