i4i 4ik 1 Ч
Изобретение относится к автоматике и может быть использовано при построении систем автоматического управления, регулирования и стабилиза-
ЦИИ (,
Цель изобретения - расширение области применения и повышение точности системы управления.
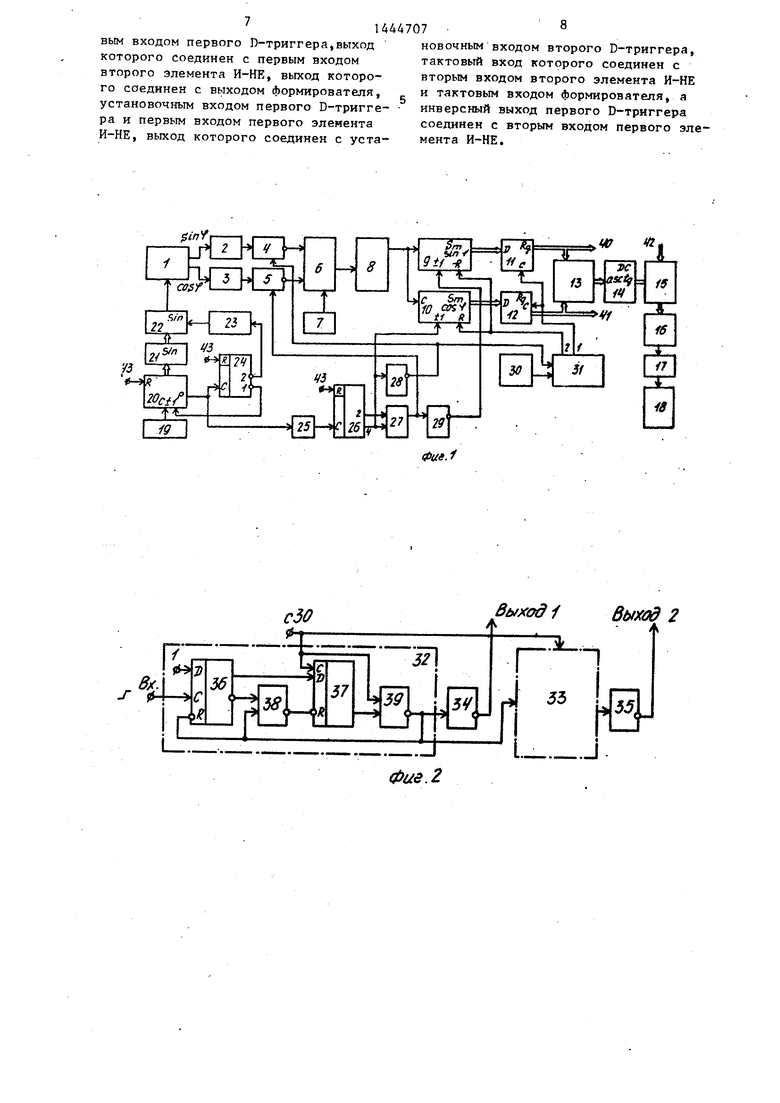
На фигь приведена функциональная схема системы управления; на фиг,2 - схема формирователя парных импульсовj на фиг, 3 - временная диаграмма работы системы.
Система управления содержит датчик 1 положения, первый и второй усилители 2 и 3, первьй и второй инверторы-повторители 4 и 5, аналоговый сумматор 6, источник опорного напряжения 7, преобразователь 8 напряжение-час- тота, первьй и второй накапливающие сумматоры 9 и 10, первьй и второй регистры 11 и 12, блок 13 деления, арк- тангенсный преобразователь 14, регулятор 15, цифроаналоговый преобразо- ватель 16, усилитель 17 мощности,датчик 18 момента, генератор 19 импульсов, реверсивный счетчик 20, си1-гус- ный преобразователь 21, второй цифро- аналоговый преобразователь 22, управ- ляемый источник 23 опорного напряжения, счетчик 24, элемент задерзкки 25, счетчик 26 периодов,, элемент 27 ИСКЛЮЧАЮЩЕЕ ИЛИ, первьй и второй инвер- торы 28 и 29, высокочастотньй reHepaтор 30 и формирователь 31 парных импульсов.
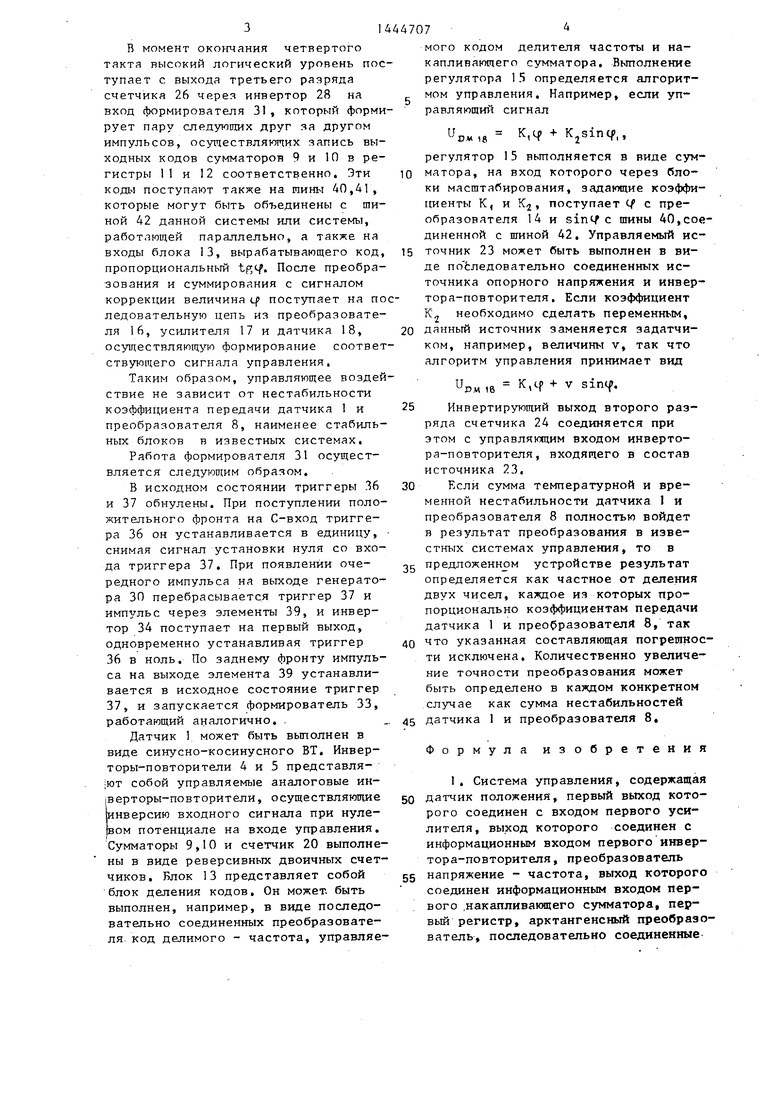
Формирователь 31 парных импульсов вьтолнен в виде формирователей 32,33 и инверторов 34,35 (фиг,2). В свою очередь формирователи 32 и 33 включают Д-триггеры 36,37 и элементы 38,39 И-НЕ, Система снабжена также выходными шинами 40 и 41, входной шиной 42 коррекции и установочным вхо- дом 43
Система работает следующим образом.
После поступления импульса на вход 43, счетчики 20,24,4 и 26 нахо- дятся в нулевом состояний, система готова, к работе, которая в дальнейшем осуществляется без установки указанных счетчиков.
Цикл работы системы состоит из четырех тактов, В каждом такте код в счетчике 20 увеличивается до максимального значения (высокий потенциал на знаковом входе счетчика 20)
и вновь уменьшается до нуля (низкий потенциал), В моменты достижения кодов максимального и нулевого значения импульс с выхода переполнения. Счетчика 20 изменяет состояние счетчика 24, управляющего полярность выходного напряжения источника 23,
8результате выходное напряжение преобразователя 22 изменяется по синусоидальному закону (два периода в течение цикла).
Задержка элемента 25 выбирается равной задержке датчика 1 (фиг.З в результате выходные импульсы счетчика 26 оказываются синхронизованными с выходными напряжениями датчика 1, Управление инверторами-повторителями 4. и 5 ос тцествляется от элементов 27 и 28, причем в первом и втором тактах инвертор-повторитель 4 пропускает сигнал без инверсии, а в т зетьем и четвертом - с инверсией Инвертор-повторитель 5 инвертирует сигнал в первом и четвертом тактах (фиг,3).
Сумма выходных сигналов инверторов-повторителей 4,5 и источника 7 обеспечивает преобразование двухпо- лярнпго выходного напряжения датчика 1 за счет смещения его характеристики и поступает на преобразователь 8, выходная частота которого подсчитывается одновременно сумматорами 9 и 10. Направление их счета определяется потенциалами на выходе третьего разряда счетчика 26 и инвертор 29,
В результате в обоих накапливающих сумматорах 9 и 10 частота f, соответствующая выходному сигналу преобразователя 8 при нулевом вход- ном напряжении, компенсируется к концу четвертого такта (в сумматоре
9она в первом и четвертом тактах берется со знаком плюс, а во втором и третьем - со знаком минус, в сумматоре 10 она в третьем и четвертом тактах берется с плюсом, в первом и втором - с минусом).
Аналогично в сумматоре 9 компенсируется частота, пропорциональная созс, а в сумматоре 10 - частота, пропорциональная sincp, так что к моменту окончания четвертого такта в сумматоре 9 оказывается число,пропорциональное только sine/), а в сумматоре 0 - только cOsCf.
В момент окончания четвертого такта высокий логический уровень поступает с выхода третьего разряда счетчика 26 черея инвертор 28 на вход формирователя 31, который формирует пару следующих друг за другом импульсов, осуществляющих запись выходных кодов сумматоров 9 и 10 в регистры 11 и 12 соответственно. Эти коды поступают также на тины 40,41 , которые могут быть объединены с шиной 42 данной системы или системы, работающей параллельно, а также на входы блока 13, вырабатывающего код пропорциональный tg(/. После преобразования и суммирования с сигналом коррекции величина cf поступает на поледовательную цепь из преобразователя 16, усилителя 17 и датчика 18, осуществляющую формирование соответствующего сигнала управления.
Таким образом, управляющее воздействие не зависит от нестабильности коэффициента передачи датчика 1 и преобразователя 8, наименее стабильных блоков в известных системах.
Работа формирователя 31 осуществляется следуюп1им образом,
В исходном состоянии триггеры 36 и 37 обнулены. При поступлении положительного фронта на С-вход триггера 36 он устанавливается в единицу, снимая сигнал установки нуля со входа триггера 37. При появлении очередного импульса на выходе генератора 30 перебрасывается триггер 37 и импульс через элементы 39, и инвертор 34 поступает на первый выход, одновременно устанавливая триггер 36 в ноль. По заднему фронту импульса на выходе элемента 39 устанавливается в исходное состояние триггер 37, и запускается формирователь 33, работающий аналогично. Датчик 1 может быть выполнен в виде синусно-косинусного ВТ. Инверторы-повторители 4 и 5 представля- ;ют собой управляемые аналоговые ин- верторы-повторители, осуществляющие инверсию входного сигнала при кулером потенциале на входе управления. Сумматоры 9,10 и счетчик 20 выполнены в виде реверсивных двоичных счетчиков. Блок 13 представляет собой блок деления кодов. Он может, быть выполнен, например, в виде последовательно соединенных преобразователя код делимого - частота, управляе
ю15 204707
мого кодом делителя частоты и накапливающего сумматора. Вьтолнение регулятора 15 определяется алгорит- g MOM управления. Например, если управляющий сигнал
см ,8 К,ц. + KjSincf,,
регулятор 15 вьтолняется в виде сумматора, на вход которого через блоки масщтабирования, задающие коэффициенты К, и Kj , поступает Cf с преобразователя 14 и sini/с шины 40,соединенной с шиной 42. Управляемый источник 23 может быть выполнен в виде по {:ледовательно соединенных источника опорного напряжения и инвертора-повторителя. Если коэффициент К необходимо сделать переменным, данный источник заменяется задатчи- ком, например, величины v, так что алгоритм управления принимает вид
и.
K,tf + V sin(f.
DM 16
Инвертирующий выход второго разряда счетчика 24 соединяется при этом с управляющим входом инвертора-повторителя, входящего в состав источника 23,
Если сумма температурной и временной нестабильности датчика 1 и преобразователя 8 полностью войдет в результат преобразования в известных системах управления, то в
предложенном устройстве результат определяется как частное от деления двух чисел, каждое из которых пропорционально коэффициентам передачи датчика 1 н преобразователи 8, так
что указанная составляющая погрешности исключена. Количественно увеличение точности преобразования может быть определено в каждом конкретном случае как сумма нестабилькостей
датчика 1 и преобразователя 8.
Формула изобретения
I. Система управления, содержащая датчик положения, первый выход которого соединен с входом первого усилителя, выход которого соединен с информационным входом первого инвертора-повторителя, преобразователь напряжение - частота, выход которого соединен информационным входом первого .накапливакицего сумматора, первый регистр, арктангенсный преобразователь, последовательно соединенные
регулятор, первый цифроаналоговый преобразователь, усилитель мощности и датчик момента, а также элемент задержки и счетчик периодов, о т - ли чающаяся тем, что, с целью расширения области применения и повышения точности системы, введе™ ны второй усилитель, второй инвертор повторитель, аналоговый сумматор, ис точник опорного напряжения, второй накапливающий сумматор, второй регистр, блок деления, последовательно соединенные реверсивный счетчик, си- нусньй преобразователь и второй циф- роаналоговый преобразователь, счетчик, управляемый источник опорного напряжения, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, два инвертора, высокочастотный генератор, генератор импульсов и форми- рователь парных импульсов, причем второй выход датчика положения соединен с входом второго усилителя, выход которого соединен с информационным входом второго инвертора-повто- рителя, выходы первого и второго инверторов-повторителей соединены соответственно с первым и вторым входами аналогового сумматора, третий вход которого соединен с выходом источни- ка опорного напряжения, выход аналогового сумматора соединен с входом преобразователя напряжение - частота, выход которого соединен с информационным входом второго накапливаю- щего сумматора, выходы обоих накапливающих сумматоров со| динены соответственно с информационными входами первого и второго регистров, выходы которых соединены с соответст- вующими выходными шинами системы управления и входами блока деления, выход которого соединен с входом арктангенсного преобразователя, выход которого подключен к информаци- онному входу регулятора, выход генератора импульсов соединен с информационным входом реверсивного, счетчика, выход переполнения которого соединен с входом элемента задержки и информационным входом счетчик,инверсный выход первого разряда которого соединен со знаковым входом реверсивного счетчика, а инверсный выхОд второго разряда, - с управляющим входом управляемого источника опорного нап- ряжения, выход которого соединен с входом опорного напряжения второго цифроаналогового преобразователя, /
выход которого сдединен с входом датчика положения, выход элемента задержки соединен с информационным входом счетчика периодов, выход второго разряда которого соединен с первым входом элемента ИСЮТПЧАК1ШЕЕ ИЛИ, выход которого подключен к управляющему входу второго инвертора- повторителя и входу первого инвертора, выход которого соединен со знаковым входом первого накапливающего сумматора, установочный вход которого соединен с установочным входом второго накапливающего сумматора и вторым выходом формирователя парных импульсов, первый выход которого соединен с тактовыми входа ш первого и второго регистров, причем выход третьего разряда счетчика периодов соединен с вторым входом элемента ИСКШОЧАЮЩЕЕ ИЛИ, знаковым входом второго накапливаюш,его сумматора и входом второго инвертора, выход которого соединен с управляющим входом первого инвертора-повторителя и потенциальным входом формирователя парных импульсов, тактовый вход которого соединен с выходом высокочастотного генератора, а установочные входы счетчика периодов, счетчика и реверсивного счетчика соединены с установочным входом системы управления,
2. Система поп.1, о тлич аю- щ а я с я тем, что формирователь парных импульсов выполнен в виде двух формирователей и двух инверторов, при этом вход первого формирователя соединен с потенциальным входом формирователя парных импульсов, тактовый вход которого соединен с тактовыми входами обоих формирователей выход первого из которых соединен с входом второго форм1арователя и выходом первого инвертора, выход которого соединен с первым выходом формирователя парных импульсов, причем выход второго формирователя соединен с входом второго инвертора, выход которого соединен с вторым выходом формирователя парных импульсов.
3. Система по п.2, отличающаяся тем, что,, формирователь выполнен в виде двух D-триггеров и двух элементов И-НЕ,, при этом информационный вход первого D-триггера соединен с шиной логической единицы, вход формирователя соединен с тактовым входом первого П-триггера,выход которого соединен с первым входом второго элемента И-НЕ, выход которого соединен с выходом формирователя, установочным входом первого D-тригге- ра и первым входом первого элемента И-НЕ, выход которого соединен с установочным входом второго D-триггера, тактовый вход которого соединен с вторым входом второго элемента И-НЕ и тактовым входом формирователя, а инверсный выход первого D-триггера соединен с вторым входом первого элемента И-НЕ,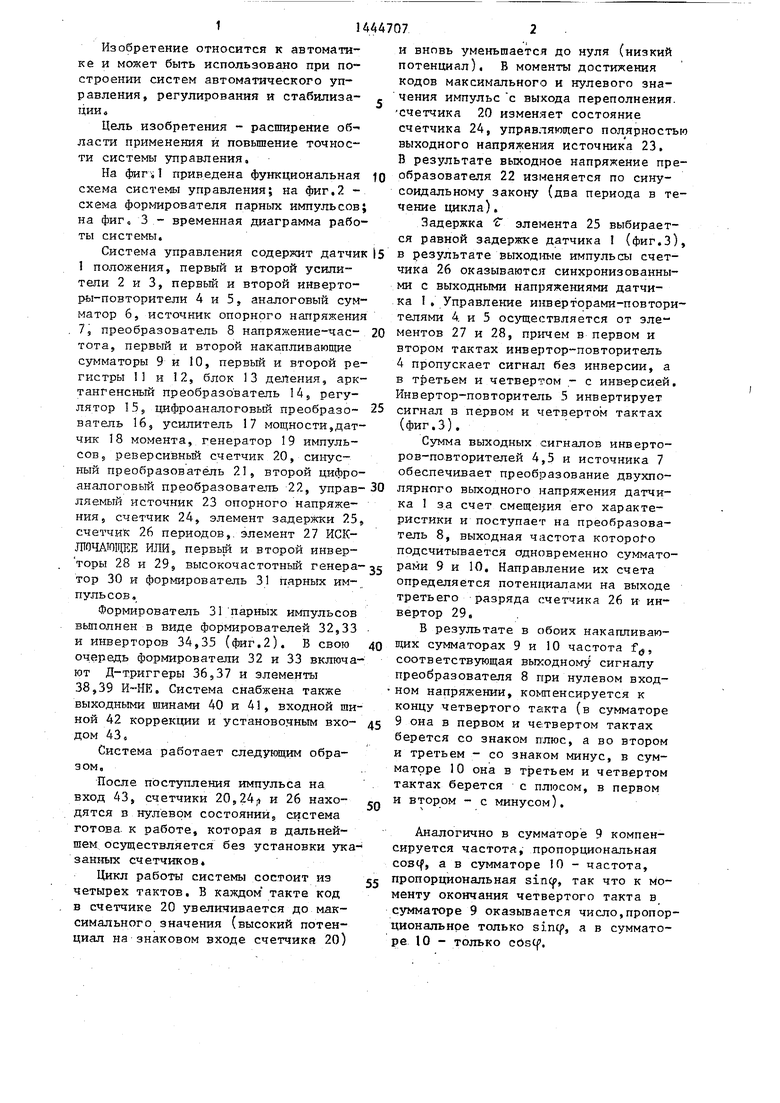
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления | 1984 |
|
SU1229721A1 |
| Регулятор | 1987 |
|
SU1462232A1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| Система управления | 1985 |
|
SU1302238A1 |
| Датчик угловой скорости | 1985 |
|
SU1296949A1 |
| Цифровой акселерометр | 1984 |
|
SU1242831A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1119050A1 |
| Цифровой вольтметр | 1985 |
|
SU1337791A1 |
| Цифровой электромагнитный толщиномер | 1988 |
|
SU1839228A1 |
| Преобразователь код-временной интервал | 1983 |
|
SU1164885A1 |
Изобретение относится к .области автоматики к может быть использовано при построении систем автоматического управления, регулирования и стабилизации. Цель изобретения расширение области применения и повышение точности систем. Система позволяет с высокой точностью преобразовать выходной сигнал датчика положения, выполненного в виде вращающегося трансформатора, и использовать его для управления объектом. Особенностью схемы является то, что на вход преобразователя напряжение- частота подается сумма сигналов с синусного и косинусного выходов датчика и напряжение опорного сигнала, а в счетчиках (сумматорах) накапливается соответственно код синуса и косинуса. Это позволяет при делении указанных кодов исключить нестабильность преобразователя. 2 з.п. ф-лы, 3 ил. с $ (Л
р
I flu
u
rJ J
q-
Jrli
I
Bt /xodi
Выход 2
55
П
5Д
I
z.f
I I I 1 i i 1
Фие.3
-
| Гироскопические системы /Под ред | |||
| Д.С.Пельпора, ч.1, М.: Высшая школа, 1977, с.22-23 | |||
| Система управления | 1985 |
|
SU1302238A1 |
| С, 05 В 11/00, 1985. | |||
